 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl of Microrobots with Reinforcement Learning under On-Device Compute Constraints
Dec 31, 2025An important function of autonomous microrobots is the ability to perform robust movement over terrain. This paper explores an edge ML approach to microrobot locomotion, allowing for on-device, lower latency control under compute, memory, and power constraints. This paper explores the locomotion of a sub-centimeter quadrupedal microrobot via reinforcement learning (RL) and deploys the resulting controller on an ultra-small system-on-chip (SoC), SC$μ$M-3C, featuring an ARM Cortex-M0 microcontroller running at 5 MHz. We train a compact FP32 multilayer perceptron (MLP) policy with two hidden layers ($[128, 64]$) in a massively parallel GPU simulation and enhance robustness by utilizing domain randomization over simulation parameters. We then study integer (Int8) quantization (per-tensor and per-feature) to allow for higher inference update rates on our resource-limited hardware, and we connect hardware power budgets to achievable update frequency via a cycles-per-update model for inference on our Cortex-M0. We propose a resource-aware gait scheduling viewpoint: given a device power budget, we can select the gait mode (trot/intermediate/gallop) that maximizes expected RL reward at a corresponding feasible update frequency. Finally, we deploy our MLP policy on a real-world large-scale robot on uneven terrain, qualitatively noting that domain-randomized training can improve out-of-distribution stability. We do not claim real-world large-robot empirical zero-shot transfer in this work.
BLISS: Interplanetary Exploration with Swarms of Low-Cost Spacecraft
Jul 20, 2023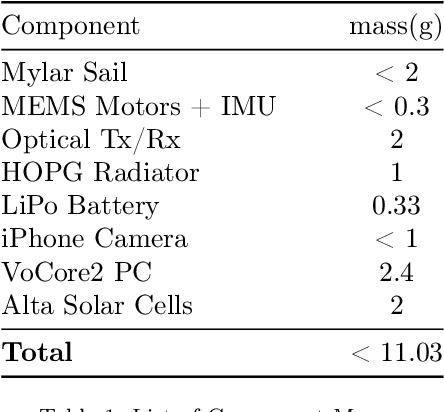
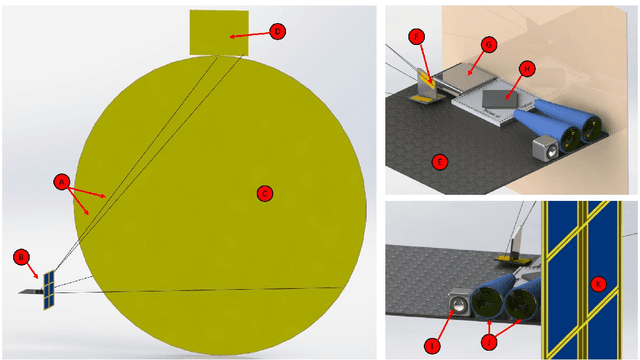
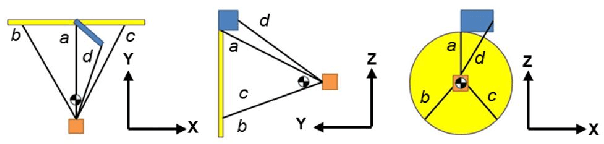
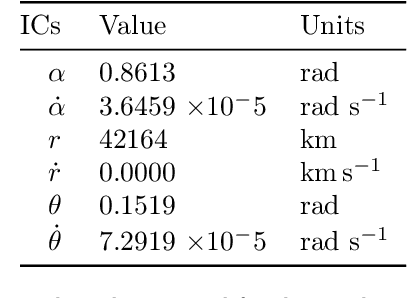
Leveraging advancements in micro-scale technology, we propose a fleet of autonomous, low-cost, small solar sails for interplanetary exploration. The Berkeley Low-cost Interplanetary Solar Sail (BLISS) project aims to utilize small-scale technologies to create a fleet of tiny interplanetary femto-spacecraft for rapid, low-cost exploration of the inner solar system. This paper describes the hardware required to build a nearly 10 g spacecraft using a 1 m2 solar sail steered by micro-electromechanical systems (MEMS) inchworm actuators. The trajectory control to a NEO, here 101955 Bennu, is detailed along with the low-level actuation control of the solar sail and the specifications of proposed onboard communication and computation. Two other applications are also shortly considered: sample return from dozens of Jupiter-family comets and interstellar comet rendezvous and imaging. The paper concludes by discussing the fundamental scaling limits and future directions for steerable autonomous miniature solar sails with onboard custom computers and sensors.
BotNet: A Simulator for Studying the Effects of Accurate Communication Models on Multi-agent and Swarm Control
Aug 31, 2021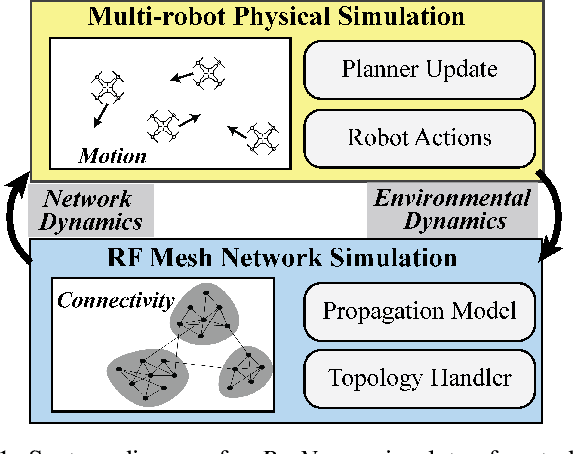
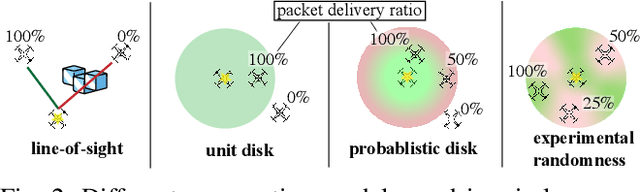
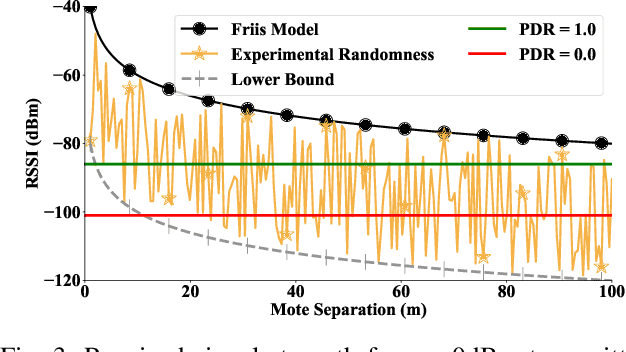
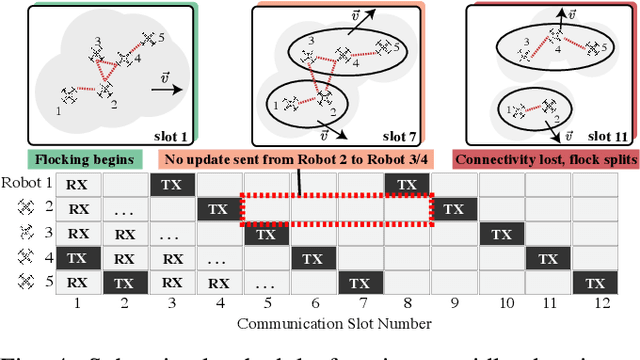
Decentralized control in multi-robot systems is dependent on accurate and reliable communication between agents. Important communication factors, such as latency and packet delivery ratio, are strong functions of the number of agents in the network. Findings from studies of mobile and high node-count radio-frequency (RF) mesh networks have only been transferred to the domain of multi-robot systems to a limited extent, and typical multi-agent robotic simulators often depend on simple propagation models that do not reflect the behavior of realistic RF networks. In this paper, we present a new open source swarm robotics simulator, BotNet, with an embedded standards-compliant time-synchronized channel hopping (6TiSCH) RF mesh network simulator. Using this simulator we show how more accurate communications models can limit even simple multi-robot control tasks such as flocking and formation control, with agent counts ranging from 10 up to 2500 agents. The experimental results are used to motivate changes to the inter-robot communication propagation models and other networking components currently used in practice in order to bridge the sim-to-real gap.
Learning Accurate Long-term Dynamics for Model-based Reinforcement Learning
Dec 16, 2020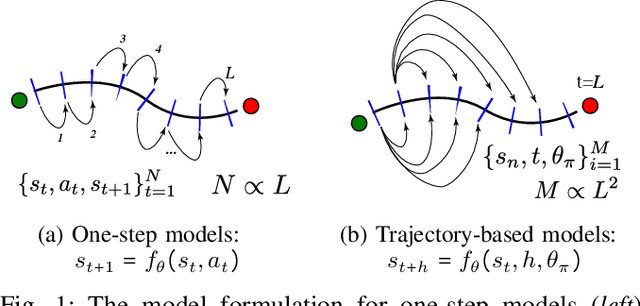
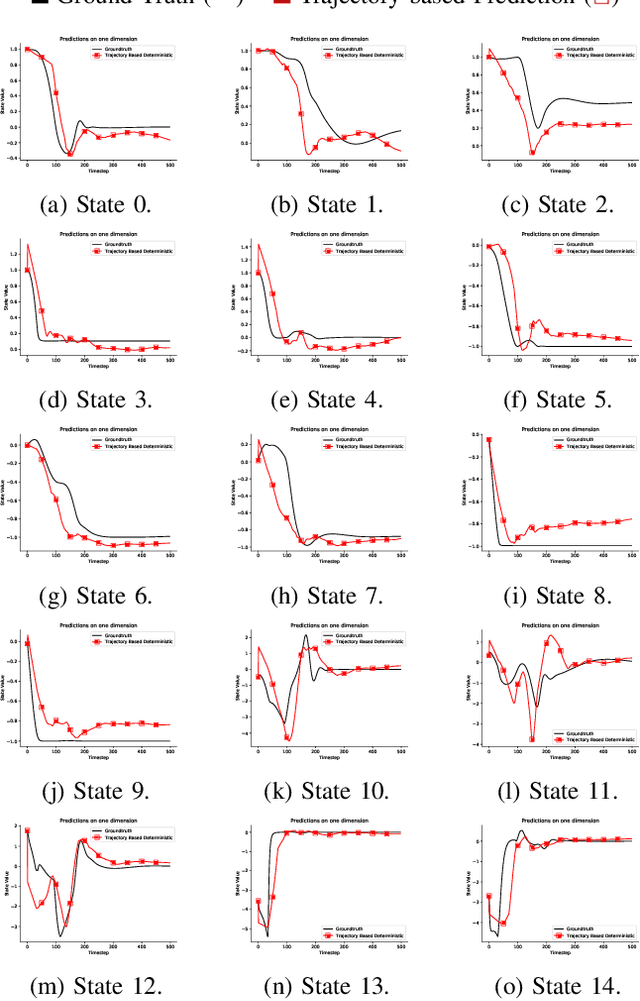
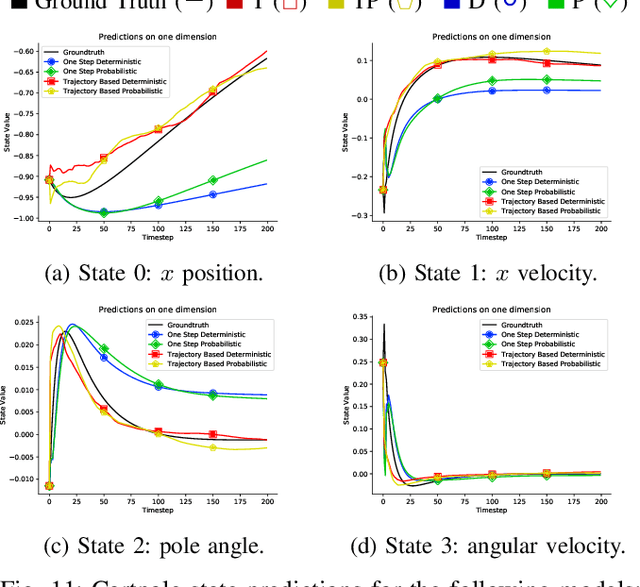
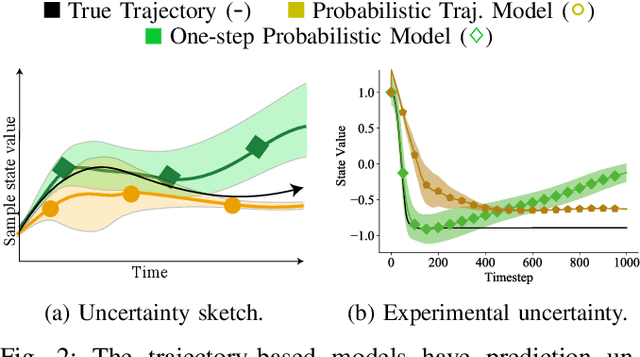
Accurately predicting the dynamics of robotic systems is crucial for model-based control and reinforcement learning. The most common way to estimate dynamics is by fitting a one-step ahead prediction model and using it to recursively propagate the predicted state distribution over long horizons. Unfortunately, this approach is known to compound even small prediction errors, making long-term predictions inaccurate. In this paper, we propose a new parametrization to supervised learning on state-action data to stably predict at longer horizons -- that we call a trajectory-based model. This trajectory-based model takes an initial state, a future time index, and control parameters as inputs, and predicts the state at the future time. Our results in simulated and experimental robotic tasks show that our trajectory-based models yield significantly more accurate long term predictions, improved sample efficiency, and ability to predict task reward.
Learning for Microrobot Exploration: Model-based Locomotion, Sparse-robust Navigation, and Low-power Deep Classification
Apr 27, 2020
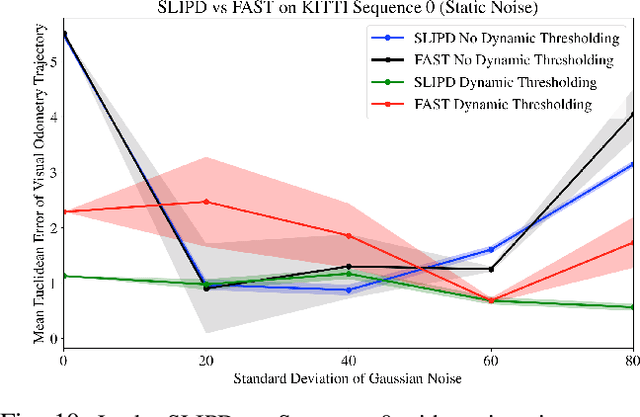

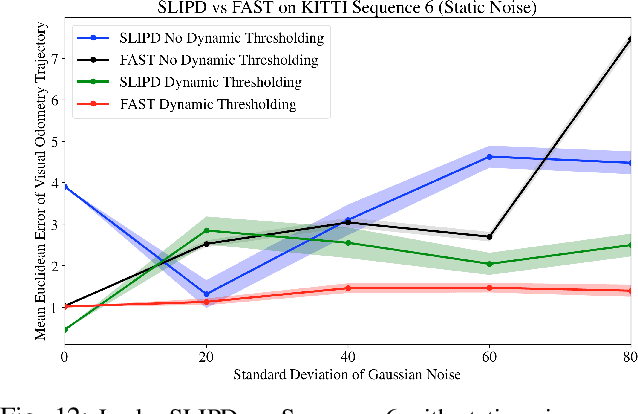
Building intelligent autonomous systems at any scale is challenging. The sensing and computation constraints of a microrobot platform make the problems harder. We present improvements to learning-based methods for on-board learning of locomotion, classification, and navigation of microrobots. We show how simulated locomotion can be achieved with model-based reinforcement learning via on-board sensor data distilled into control. Next, we introduce a sparse, linear detector and a Dynamic Thresholding method to FAST Visual Odometry for improved navigation in the noisy regime of mm scale imagery. We end with a new image classifier capable of classification with fewer than one million multiply-and-accumulate (MAC) operations by combining fast downsampling, efficient layer structures and hard activation functions. These are promising steps toward using state-of-the-art algorithms in the power-limited world of edge-intelligence and microrobots.
Low Level Control of a Quadrotor with Deep Model-Based Reinforcement learning
Jan 11, 2019
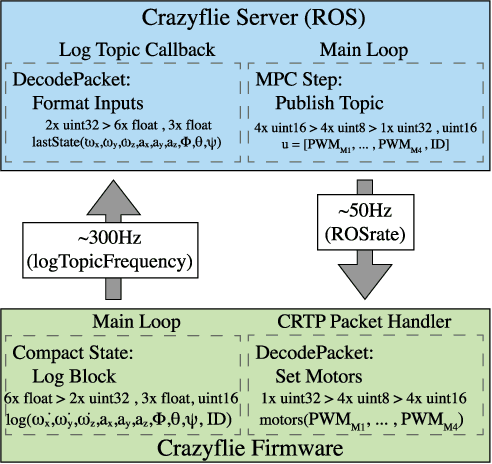

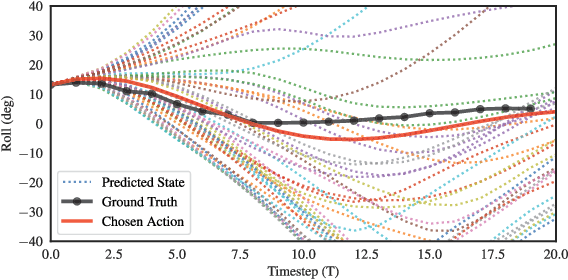
Generating low-level robot controllers often requires manual parameters tuning and significant system knowledge, which can result in long design times for highly specialized controllers. With the growth of automation, the need for such controllers might grow faster than the number of expert designers. To address the problem of rapidly generating low-level controllers without domain knowledge, we propose using model-based reinforcement learning (MBRL) trained on few minutes of automatically generated data. In this paper, we explore the capabilities of MBRL on a Crazyflie quadrotor with rapid dynamics where existing classical control schemes offer a baseline against the new method's performance. To our knowledge, this is the first use of MBRL for low-level controlled hover of a quadrotor using only on-board sensors, direct motor input signals, and no initial dynamics knowledge. Our forward dynamics model for prediction is a neural network tuned to predict the state variables at the next time step, with a regularization term on the variance of predictions. The model predictive controller then transmits best actions from a GPU-enabled base station to the quadrotor firmware via radio. In our experiments, the quadrotor achieved hovering capability of up to 6 seconds with 3 minutes of experimental training data.
Decentralized Control of a Hexapod Robot Using a Wireless Time Synchronized Network
Aug 23, 2018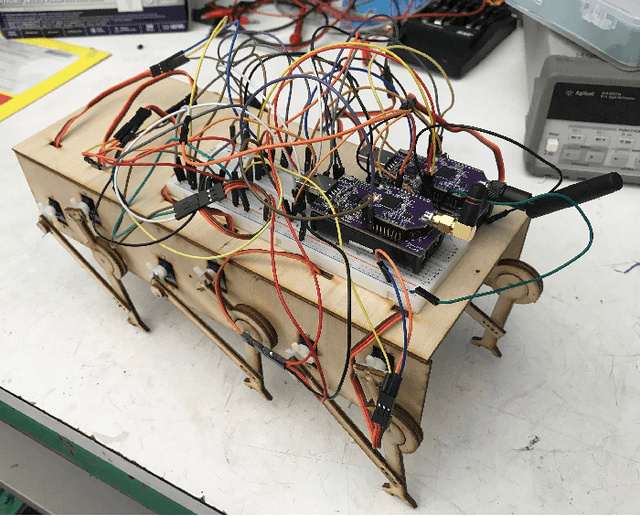
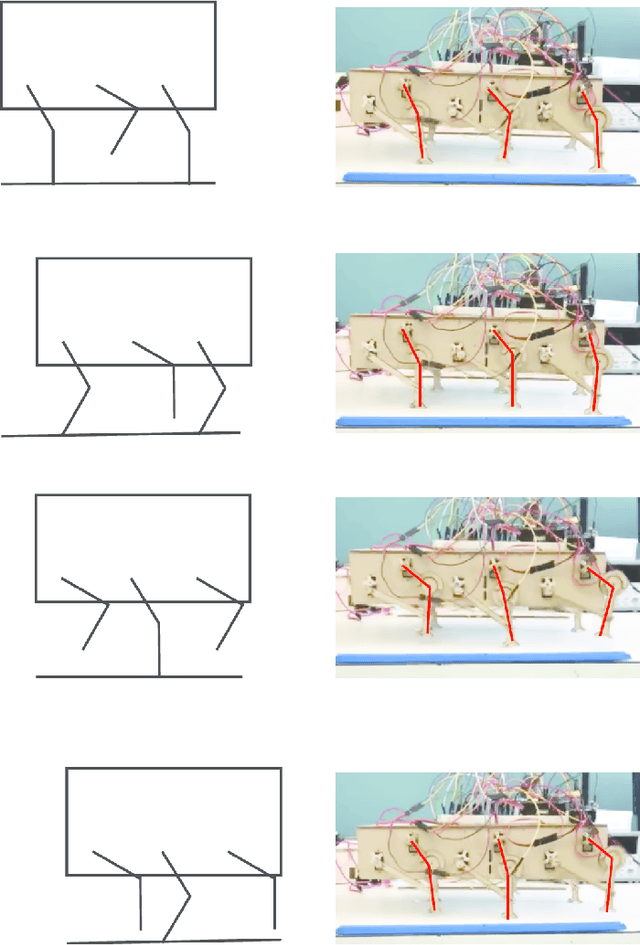

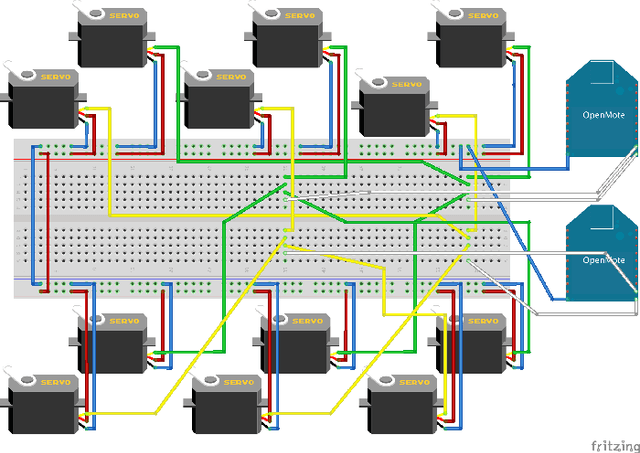
Robots and control systems rely upon precise timing of sensors and actuators in order to operate intelligently. We present a functioning hexapod robot that walks with a dual tripod gait; each tripod is actuated using its own local controller running on a separate wireless node. We compare and report the results of operating the robot using two different decentralized control schemes. With the first scheme, each controller relies on its own local clock to generate control signals for the tripod it controls. With the second scheme, each controller relies on a variable that is local to itself but that is necessarily the same across controllers as a by-product of their host nodes being part of a time synchronized IEEE802.15.4e network. The gait synchronization error (time difference between what both controllers believe is the start of the gait period) grows linearly when the controllers use their local clocks, but remains bounded to within 112 microseconds when the controllers use their nodes' time synchronized local variable.