 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBLISS: Interplanetary Exploration with Swarms of Low-Cost Spacecraft
Jul 20, 2023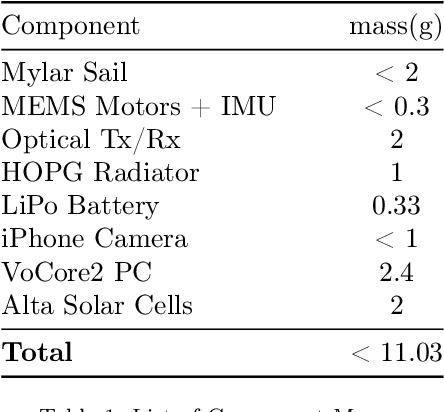
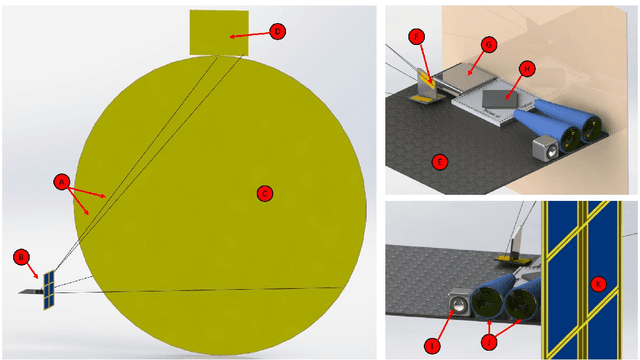
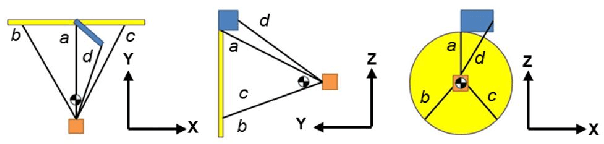
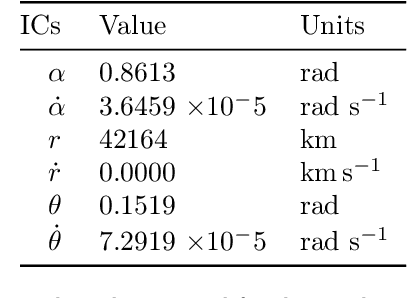
Leveraging advancements in micro-scale technology, we propose a fleet of autonomous, low-cost, small solar sails for interplanetary exploration. The Berkeley Low-cost Interplanetary Solar Sail (BLISS) project aims to utilize small-scale technologies to create a fleet of tiny interplanetary femto-spacecraft for rapid, low-cost exploration of the inner solar system. This paper describes the hardware required to build a nearly 10 g spacecraft using a 1 m2 solar sail steered by micro-electromechanical systems (MEMS) inchworm actuators. The trajectory control to a NEO, here 101955 Bennu, is detailed along with the low-level actuation control of the solar sail and the specifications of proposed onboard communication and computation. Two other applications are also shortly considered: sample return from dozens of Jupiter-family comets and interstellar comet rendezvous and imaging. The paper concludes by discussing the fundamental scaling limits and future directions for steerable autonomous miniature solar sails with onboard custom computers and sensors.
Automatic detection of impact craters on Al foils from the Stardust interstellar dust collector using convolutional neural networks
Mar 15, 2021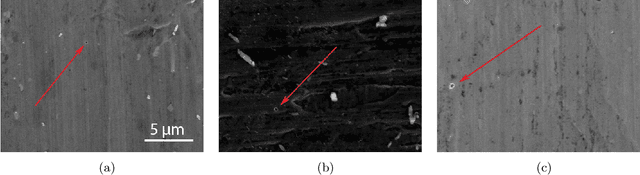
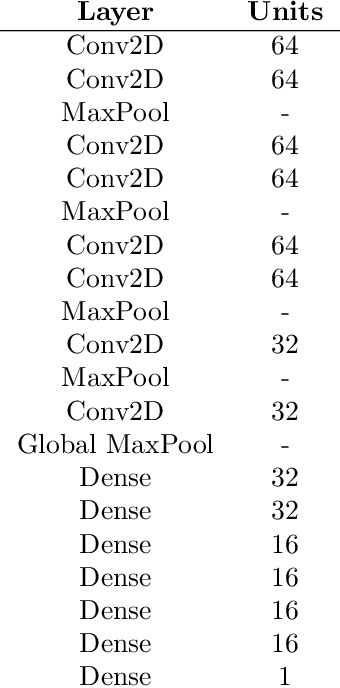
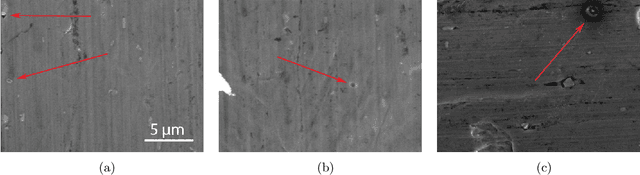
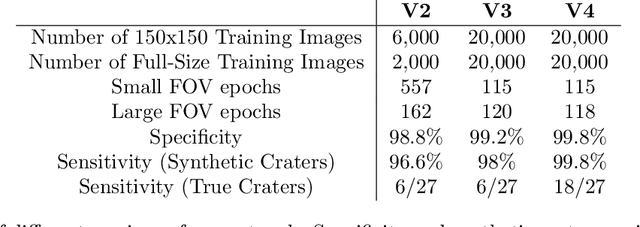
NASA's Stardust mission utilized a sample collector composed of aerogel and aluminum foil to return cometary and interstellar particles to Earth. Analysis of the aluminum foil begins with locating craters produced by hypervelocity impacts of cometary and interstellar dust. Interstellar dust craters are typically less than one micrometer in size and are sparsely distributed, making them difficult to find. In this paper, we describe a convolutional neural network based on the VGG16 architecture that achieves high specificity and sensitivity in locating impact craters in the Stardust interstellar collector foils. We evaluate its implications for current and future analyses of Stardust samples.