 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBLISS: Interplanetary Exploration with Swarms of Low-Cost Spacecraft
Jul 20, 2023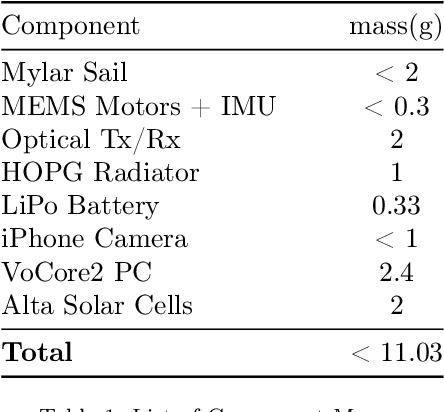
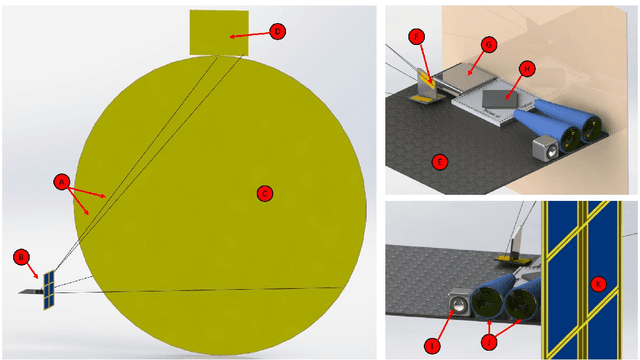
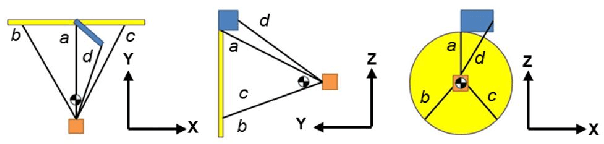
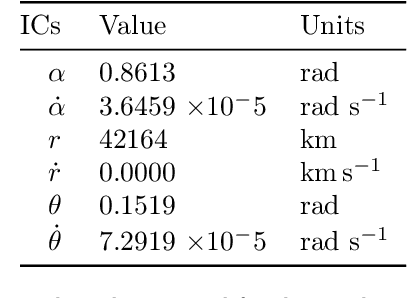
Leveraging advancements in micro-scale technology, we propose a fleet of autonomous, low-cost, small solar sails for interplanetary exploration. The Berkeley Low-cost Interplanetary Solar Sail (BLISS) project aims to utilize small-scale technologies to create a fleet of tiny interplanetary femto-spacecraft for rapid, low-cost exploration of the inner solar system. This paper describes the hardware required to build a nearly 10 g spacecraft using a 1 m2 solar sail steered by micro-electromechanical systems (MEMS) inchworm actuators. The trajectory control to a NEO, here 101955 Bennu, is detailed along with the low-level actuation control of the solar sail and the specifications of proposed onboard communication and computation. Two other applications are also shortly considered: sample return from dozens of Jupiter-family comets and interstellar comet rendezvous and imaging. The paper concludes by discussing the fundamental scaling limits and future directions for steerable autonomous miniature solar sails with onboard custom computers and sensors.
Cell abundance aware deep learning for cell detection on highly imbalanced pathological data
Feb 23, 2021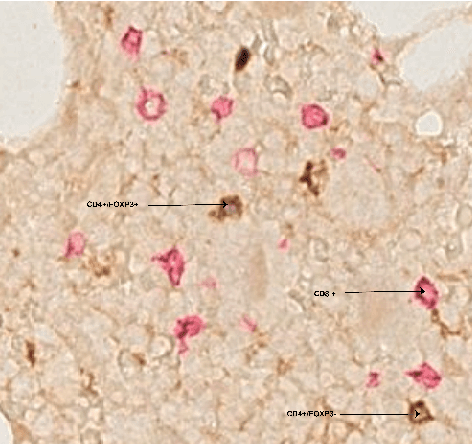


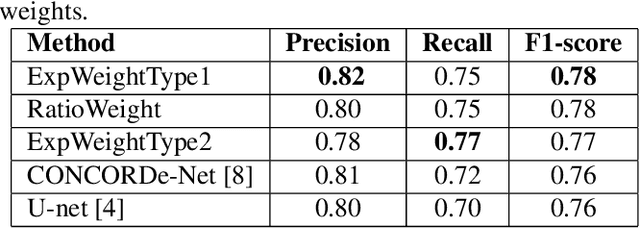
Automated analysis of tissue sections allows a better understanding of disease biology and may reveal biomarkers that could guide prognosis or treatment selection. In digital pathology, less abundant cell types can be of biological significance, but their scarcity can result in biased and sub-optimal cell detection model. To minimize the effect of cell imbalance on cell detection, we proposed a deep learning pipeline that considers the abundance of cell types during model training. Cell weight images were generated, which assign larger weights to less abundant cells and used the weights to regularize Dice overlap loss function. The model was trained and evaluated on myeloma bone marrow trephine samples. Our model obtained a cell detection F1-score of 0.78, a 2% increase compared to baseline models, and it outperformed baseline models at detecting rare cell types. We found that scaling deep learning loss function by the abundance of cells improves cell detection performance. Our results demonstrate the importance of incorporating domain knowledge on deep learning methods for pathological data with class imbalance.
Learning for Microrobot Exploration: Model-based Locomotion, Sparse-robust Navigation, and Low-power Deep Classification
Apr 27, 2020
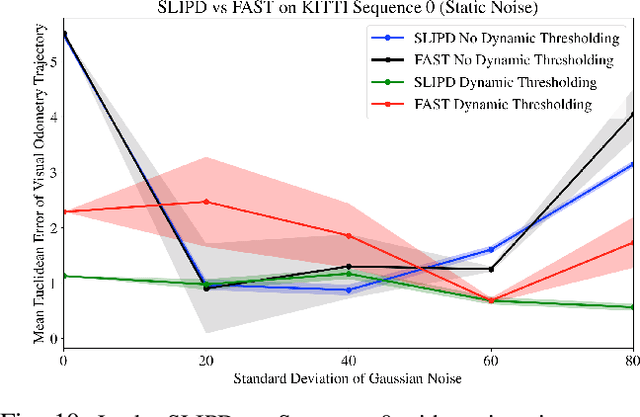

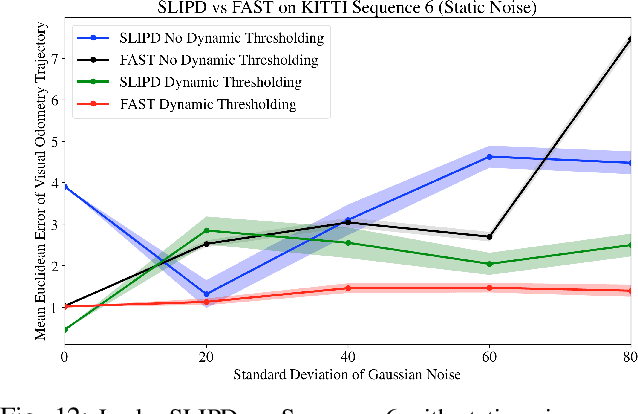
Building intelligent autonomous systems at any scale is challenging. The sensing and computation constraints of a microrobot platform make the problems harder. We present improvements to learning-based methods for on-board learning of locomotion, classification, and navigation of microrobots. We show how simulated locomotion can be achieved with model-based reinforcement learning via on-board sensor data distilled into control. Next, we introduce a sparse, linear detector and a Dynamic Thresholding method to FAST Visual Odometry for improved navigation in the noisy regime of mm scale imagery. We end with a new image classifier capable of classification with fewer than one million multiply-and-accumulate (MAC) operations by combining fast downsampling, efficient layer structures and hard activation functions. These are promising steps toward using state-of-the-art algorithms in the power-limited world of edge-intelligence and microrobots.