 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Framework for Predicting the Remaining Useful Life of Lithium-Ion Batteries
May 22, 2025Accurate prediction of the Remaining Useful Life (RUL) is essential for enabling timely maintenance of lithium-ion batteries, impacting the operational efficiency of electric applications that rely on them. This paper proposes a RUL prediction approach that leverages data from recent charge-discharge cycles to estimate the number of remaining usable cycles. The approach introduces both a novel signal processing pipeline and a deep learning prediction model. In the signal preprocessing pipeline, a derived capacity feature is computed based on current and capacity signals. Alongside original capacity, voltage and current, these features are denoised and enhanced using statistical metrics and a delta-based method to capture differences between the current and previous cycles. In the prediction model, the processed features are then fed into a hybrid deep learning architecture composed of 1D Convolutional Neural Networks (CNN), Attentional Long Short-Term Memory (A-LSTM), and Ordinary Differential Equation-based LSTM (ODE-LSTM) modules. This architecture is designed to capture both local signal characteristics and long-range temporal dependencies while modeling the continuous-time dynamics of battery degradation. The model is further evaluated using transfer learning across different learning strategies and target data partitioning scenarios. Results indicate that the model maintains robust performance, even when fine-tuned on limited target data. Experimental results on two publicly available large-scale datasets demonstrate that the proposed method outperforms a baseline deep learning approach and machine learning techniques, achieving an RMSE of 101.59, highlighting its strong potential for real-world RUL prediction applications.
Fairness and Robustness in Machine Unlearning
Apr 18, 2025Machine unlearning poses the challenge of ``how to eliminate the influence of specific data from a pretrained model'' in regard to privacy concerns. While prior research on approximated unlearning has demonstrated accuracy and efficiency in time complexity, we claim that it falls short of achieving exact unlearning, and we are the first to focus on fairness and robustness in machine unlearning algorithms. Our study presents fairness Conjectures for a well-trained model, based on the variance-bias trade-off characteristic, and considers their relevance to robustness. Our Conjectures are supported by experiments conducted on the two most widely used model architectures, ResNet and ViT, demonstrating the correlation between fairness and robustness: \textit{the higher fairness-gap is, the more the model is sensitive and vulnerable}. In addition, our experiments demonstrate the vulnerability of current state-of-the-art approximated unlearning algorithms to adversarial attacks, where their unlearned models suffer a significant drop in accuracy compared to the exact-unlearned models. We claim that our fairness-gap measurement and robustness metric should be used to evaluate the unlearning algorithm. Furthermore, we demonstrate that unlearning in the intermediate and last layers is sufficient and cost-effective for time and memory complexity.
HybridoNet-Adapt: A Domain-Adapted Framework for Accurate Lithium-Ion Battery RUL Prediction
Mar 27, 2025Accurate prediction of the remaining useful life (RUL) in Lithium-ion battery (LIB) health management systems is crucial for ensuring reliability and safety. Current methods typically assume that training and testing data share the same distribution, overlooking the benefits of incorporating diverse data sources to enhance model performance. To address this limitation, we introduce a data-independent RUL prediction framework along with its domain adaptation (DA) approach, which leverages heterogeneous data sources for improved target predictions. Our approach integrates comprehensive data preprocessing, including feature extraction, denoising, and normalization, with a data-independent prediction model that combines Long Short-Term Memory (LSTM), Multihead Attention, and a Neural Ordinary Differential Equation (NODE) block, termed HybridoNet. The domain-adapted version, HybridoNet Adapt, is trained using a novel technique inspired by the Domain-Adversarial Neural Network (DANN) framework, a regression ensemble method, and Maximum Mean Discrepancy (MMD) to learn domain-invariant features from labeled cycling data in the source and target domains. Experimental results demonstrate that our approach outperforms state-of-the-art techniques, providing reliable RUL predictions for real-world applications.
Sing-On-Your-Beat: Simple Text-Controllable Accompaniment Generations
Nov 03, 2024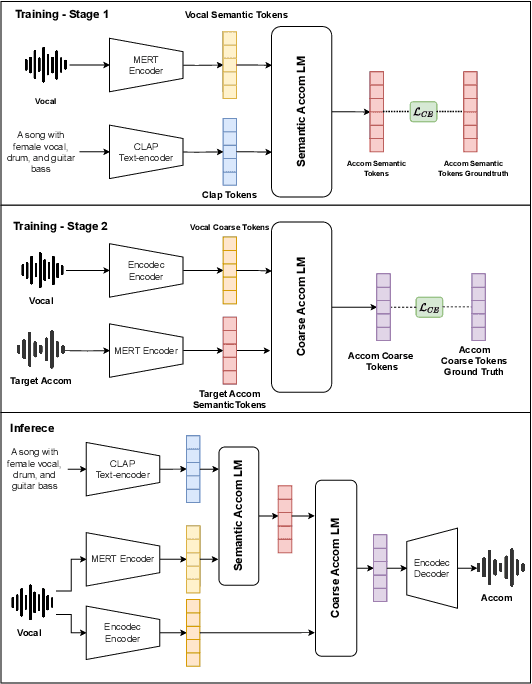
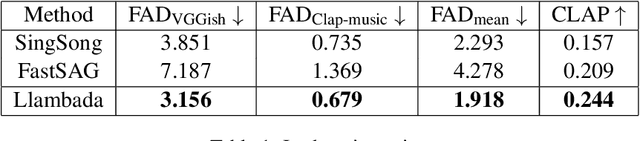
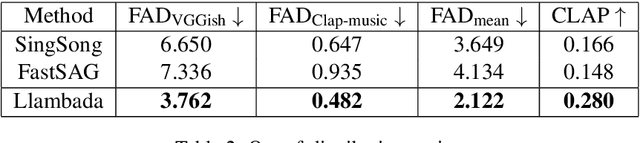
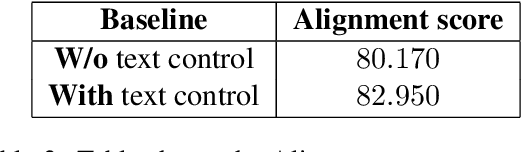
Singing is one of the most cherished forms of human entertainment. However, creating a beautiful song requires an accompaniment that complements the vocals and aligns well with the song instruments and genre. With advancements in deep learning, previous research has focused on generating suitable accompaniments but often lacks precise alignment with the desired instrumentation and genre. To address this, we propose a straightforward method that enables control over the accompaniment through text prompts, allowing the generation of music that complements the vocals and aligns with the song instrumental and genre requirements. Through extensive experiments, we successfully generate 10-second accompaniments using vocal input and text control.
Uniform $\mathcal{C}^k$ Approximation of $G$-Invariant and Antisymmetric Functions, Embedding Dimensions, and Polynomial Representations
Mar 02, 2024For any subgroup $G$ of the symmetric group $\mathcal{S}_n$ on $n$ symbols, we present results for the uniform $\mathcal{C}^k$ approximation of $G$-invariant functions by $G$-invariant polynomials. For the case of totally symmetric functions ($G = \mathcal{S}_n$), we show that this gives rise to the sum-decomposition Deep Sets ansatz of Zaheer et al. (2018), where both the inner and outer functions can be chosen to be smooth, and moreover, the inner function can be chosen to be independent of the target function being approximated. In particular, we show that the embedding dimension required is independent of the regularity of the target function, the accuracy of the desired approximation, as well as $k$. Next, we show that a similar procedure allows us to obtain a uniform $\mathcal{C}^k$ approximation of antisymmetric functions as a sum of $K$ terms, where each term is a product of a smooth totally symmetric function and a smooth antisymmetric homogeneous polynomial of degree at most $\binom{n}{2}$. We also provide upper and lower bounds on $K$ and show that $K$ is independent of the regularity of the target function, the desired approximation accuracy, and $k$.
Robust-MBFD: A Robust Deep Learning System for Motor Bearing Faults Detection Using Multiple Deep Learning Training Strategies and A Novel Double Loss Function
Oct 17, 2023This paper presents a comprehensive analysis of motor bearing fault detection (MBFD), which involves the task of identifying faults in a motor bearing based on its vibration. To this end, we first propose and evaluate various machine learning based systems for the MBFD task. Furthermore, we propose three deep learning based systems for the MBFD task, each of which explores one of the following training strategies: supervised learning, semi-supervised learning, and unsupervised learning. The proposed machine learning based systems and deep learning based systems are evaluated, compared, and then they are used to identify the best model for the MBFD task. We conducted extensive experiments on various benchmark datasets of motor bearing faults, including those from the American Society for Mechanical Failure Prevention Technology (MFPT), Case Western Reserve University Bearing Center (CWRU), and the Condition Monitoring of Bearing Damage in Electromechanical Drive Systems from Paderborn University (PU). The experimental results on different datasets highlight two main contributions of this study. First, we prove that deep learning based systems are more effective than machine learning based systems for the MBFD task. Second, we achieve a robust and general deep learning based system with a novel loss function for the MBFD task on several benchmark datasets, demonstrating its potential for real-life MBFD applications.
Safe Stabilizing Control for Polygonal Robots in Dynamic Elliptical Environments
Sep 30, 2023
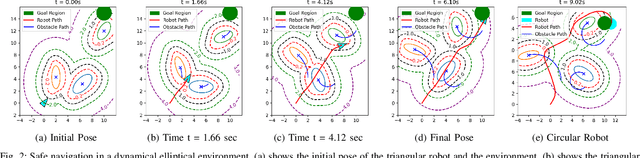
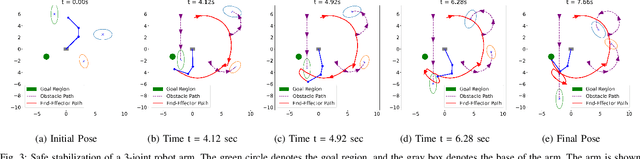
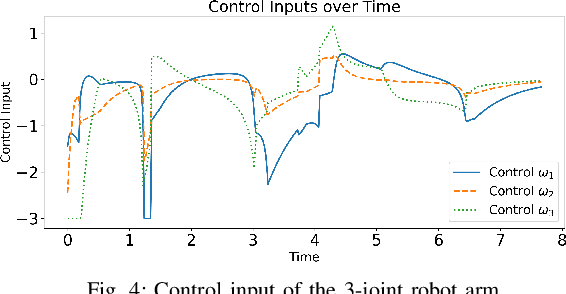
This paper addresses the challenge of safe navigation for rigid-body mobile robots in dynamic environments. We introduce an analytic approach to compute the distance between a polygon and an ellipse, and employ it to construct a control barrier function (CBF) for safe control synthesis. Existing CBF design methods for mobile robot obstacle avoidance usually assume point or circular robots, preventing their applicability to more realistic robot body geometries. Our work enables CBF designs that capture complex robot and obstacle shapes. We demonstrate the effectiveness of our approach in simulations highlighting real-time obstacle avoidance in constrained and dynamic environments for both mobile robots and multi-joint robot arms.
Robust-MBDL: A Robust Multi-branch Deep Learning Based Model for Remaining Useful Life Prediction and Operational Condition Identification of Rotating Machines
Sep 12, 2023



In this paper, a Robust Multi-branch Deep learning-based system for remaining useful life (RUL) prediction and condition operations (CO) identification of rotating machines is proposed. In particular, the proposed system comprises main components: (1) an LSTM-Autoencoder to denoise the vibration data; (2) a feature extraction to generate time-domain, frequency-domain, and time-frequency based features from the denoised data; (3) a novel and robust multi-branch deep learning network architecture to exploit the multiple features. The performance of our proposed system was evaluated and compared to the state-of-the-art systems on two benchmark datasets of XJTU-SY and PRONOSTIA. The experimental results prove that our proposed system outperforms the state-of-the-art systems and presents potential for real-life applications on bearing machines.
Robust, General, and Low Complexity Acoustic Scene Classification Systems and An Effective Visualization for Presenting a Sound Scene Context
Oct 16, 2022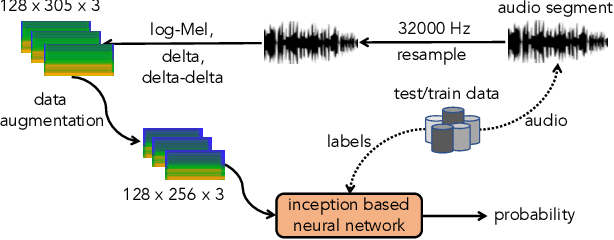
In this paper, we present a comprehensive analysis of Acoustic Scene Classification (ASC), the task of identifying the scene of an audio recording from its acoustic signature. In particular, we firstly propose an inception-based and low footprint ASC model, referred to as the ASC baseline. The proposed ASC baseline is then compared with benchmark and high-complexity network architectures of MobileNetV1, MobileNetV2, VGG16, VGG19, ResNet50V2, ResNet152V2, DenseNet121, DenseNet201, and Xception. Next, we improve the ASC baseline by proposing a novel deep neural network architecture which leverages residual-inception architectures and multiple kernels. Given the novel residual-inception (NRI) model, we further evaluate the trade off between the model complexity and the model accuracy performance. Finally, we evaluate whether sound events occurring in a sound scene recording can help to improve ASC accuracy, then indicate how a sound scene context is well presented by combining both sound scene and sound event information. We conduct extensive experiments on various ASC datasets, including Crowded Scenes, IEEE AASP Challenge on Detection and Classification of Acoustic Scenes and Events (DCASE) 2018 Task 1A and 1B, 2019 Task 1A and 1B, 2020 Task 1A, 2021 Task 1A, 2022 Task 1. The experimental results on several different ASC challenges highlight two main achievements; the first is to propose robust, general, and low complexity ASC systems which are suitable for real-life applications on a wide range of edge devices and mobiles; the second is to propose an effective visualization method for comprehensively presenting a sound scene context.
Remote Sensing Image Classification using Transfer Learning and Attention Based Deep Neural Network
Jun 20, 2022
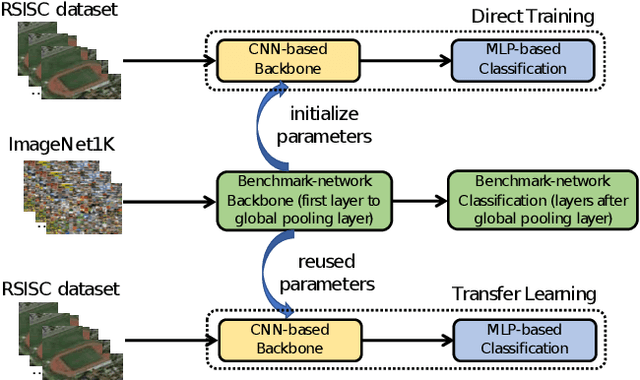
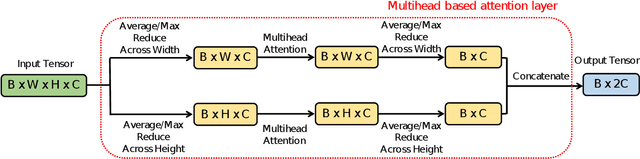
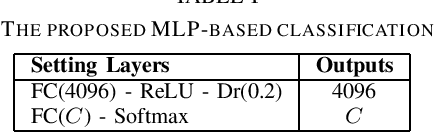
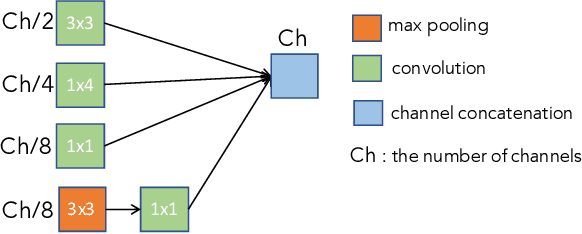
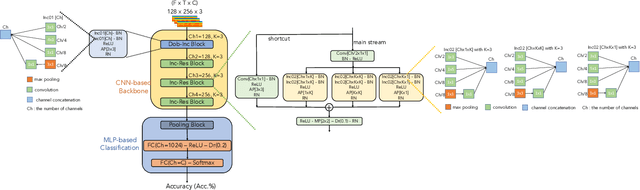
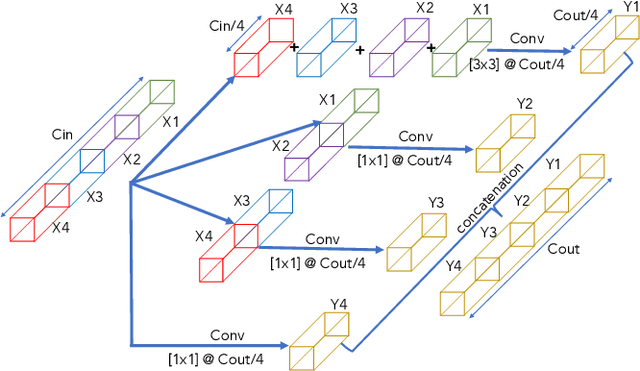
The task of remote sensing image scene classification (RSISC), which aims at classifying remote sensing images into groups of semantic categories based on their contents, has taken the important role in a wide range of applications such as urban planning, natural hazards detection, environment monitoring,vegetation mapping, or geospatial object detection. During the past years, research community focusing on RSISC task has shown significant effort to publish diverse datasets as well as propose different approaches to deal with the RSISC challenges. Recently, almost proposed RSISC systems base on deep learning models which prove powerful and outperform traditional approaches using image processing and machine learning. In this paper, we also leverage the power of deep learning technology, evaluate a variety of deep neural network architectures, indicate main factors affecting the performance of a RSISC system. Given the comprehensive analysis, we propose a deep learning based framework for RSISC, which makes use of the transfer learning technique and multihead attention scheme. The proposed deep learning framework is evaluated on the benchmark NWPU-RESISC45 dataset and achieves the best classification accuracy of 94.7% which shows competitive to the state-of-the-art systems and potential for real-life applications.