 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFedRSClip: Federated Learning for Remote Sensing Scene Classification Using Vision-Language Models
Jan 05, 2025



Remote sensing data is often distributed across multiple institutions, and due to privacy concerns and data-sharing restrictions, leveraging large-scale datasets in a centralized training framework is challenging. Federated learning offers a promising solution by enabling collaborative model training across distributed data sources without requiring data centralization. However, current Vision-Language Models (VLMs), which typically contain billions of parameters, pose significant communication challenges for traditional federated learning approaches based on model parameter updates, as they would incur substantial communication costs. In this paper, we propose FedRSCLIP, the first federated learning framework designed for remote sensing image classification based on a VLM, specifically CLIP. FedRSCLIP addresses the challenges of data heterogeneity and large-scale model transmission in federated environments by introducing Prompt Learning, which optimizes only a small set of tunable parameters. The framework introduces a dual-prompt mechanism, comprising Shared Prompts for global knowledge sharing and Private Prompts for client-specific adaptation. To maintain semantic coherence between shared and private prompts, we propose the Dual Prompt Alignment Constraint to balance global consistency and local adaptability across diverse client distributions. Additionally, to enhance cross-modal representation learning, we introduce the Cross-Modal Feature Alignment Constraint to align multimodal features between text and image prompts. To validate the effectiveness of our proposed model, we construct a Fed-RSIC dataset based on three existing remote sensing image classification datasets, specifically designed to simulate various federated learning configurations. Experimental results demonstrate the effectiveness and superiority of FedRSCLIP in remote sensing image classification.
Generalization-Enhanced Few-Shot Object Detection in Remote Sensing
Jan 05, 2025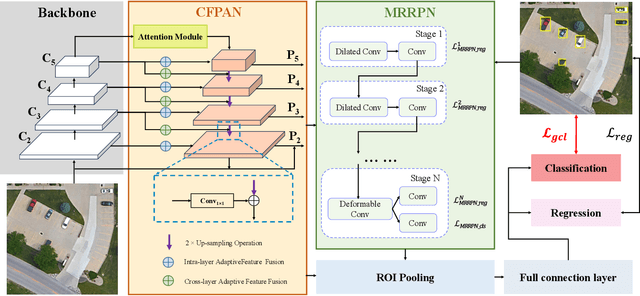
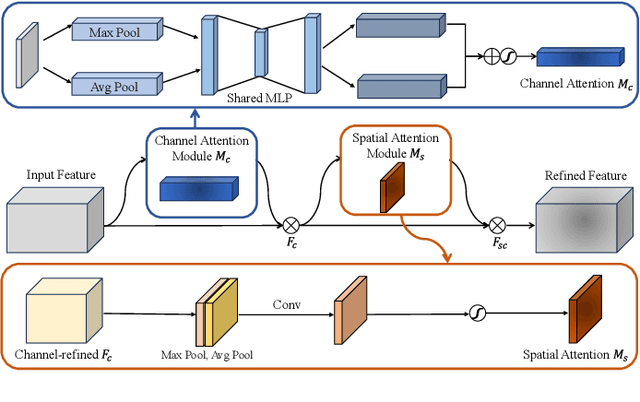
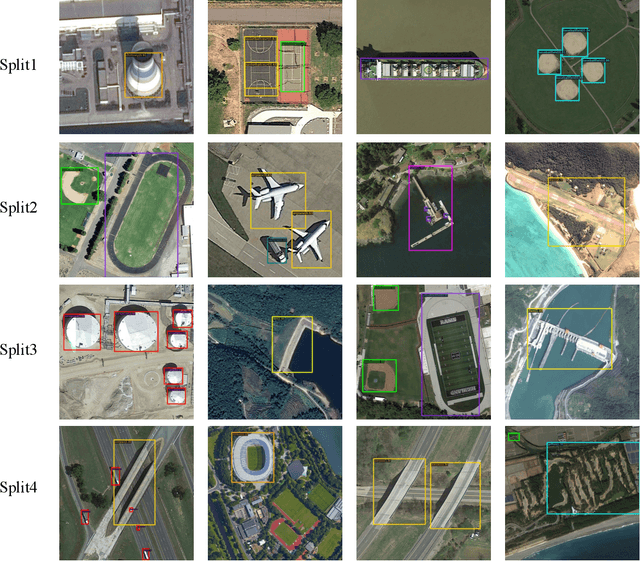

Remote sensing object detection is particularly challenging due to the high resolution, multi-scale features, and diverse ground object characteristics inherent in satellite and UAV imagery. These challenges necessitate more advanced approaches for effective object detection in such environments. While deep learning methods have achieved remarkable success in remote sensing object detection, they typically rely on large amounts of labeled data. Acquiring sufficient labeled data, particularly for novel or rare objects, is both challenging and time-consuming in remote sensing scenarios, limiting the generalization capabilities of existing models. To address these challenges, few-shot learning (FSL) has emerged as a promising approach, aiming to enable models to learn new classes from limited labeled examples. Building on this concept, few-shot object detection (FSOD) specifically targets object detection challenges in data-limited conditions. However, the generalization capability of FSOD models, particularly in remote sensing, is often constrained by the complex and diverse characteristics of the objects present in such environments. In this paper, we propose the Generalization-Enhanced Few-Shot Object Detection (GE-FSOD) model to improve the generalization capability in remote sensing FSOD tasks. Our model introduces three key innovations: the Cross-Level Fusion Pyramid Attention Network (CFPAN) for enhanced multi-scale feature representation, the Multi-Stage Refinement Region Proposal Network (MRRPN) for more accurate region proposals, and the Generalized Classification Loss (GCL) for improved classification performance in few-shot scenarios. Extensive experiments on the DIOR and NWPU VHR-10 datasets show that our model achieves state-of-the-art performance for few-shot object detection in remote sensing.
Detecting the Anomalies in LiDAR Pointcloud
Jul 31, 2023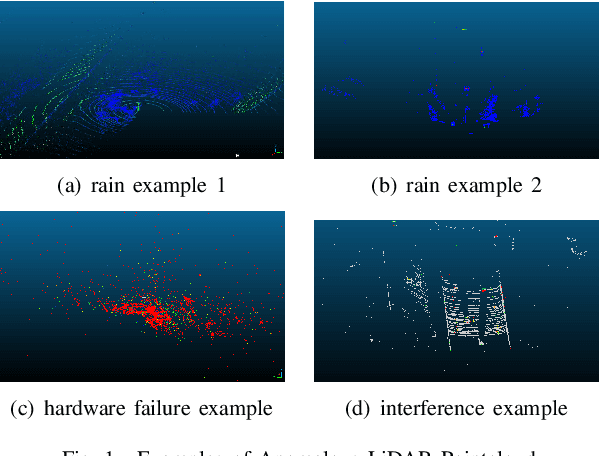
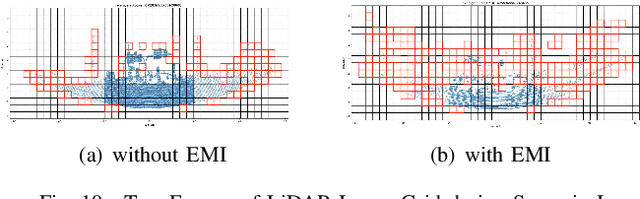
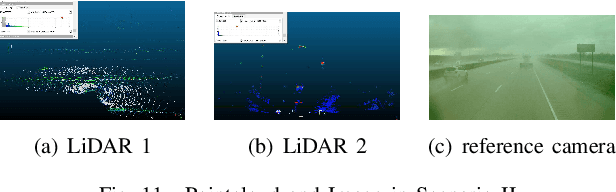
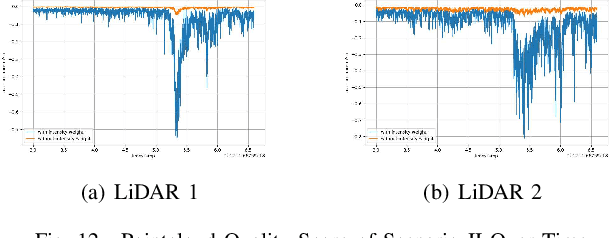
LiDAR sensors play an important role in the perception stack of modern autonomous driving systems. Adverse weather conditions such as rain, fog and dust, as well as some (occasional) LiDAR hardware fault may cause the LiDAR to produce pointcloud with abnormal patterns such as scattered noise points and uncommon intensity values. In this paper, we propose a novel approach to detect whether a LiDAR is generating anomalous pointcloud by analyzing the pointcloud characteristics. Specifically, we develop a pointcloud quality metric based on the LiDAR points' spatial and intensity distribution to characterize the noise level of the pointcloud, which relies on pure mathematical analysis and does not require any labeling or training as learning-based methods do. Therefore, the method is scalable and can be quickly deployed either online to improve the autonomy safety by monitoring anomalies in the LiDAR data or offline to perform in-depth study of the LiDAR behavior over large amount of data. The proposed approach is studied with extensive real public road data collected by LiDARs with different scanning mechanisms and laser spectrums, and is proven to be able to effectively handle various known and unknown sources of pointcloud anomaly.