 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEffective High-order Graph Representation Learning for Credit Card Fraud Detection
Mar 03, 2025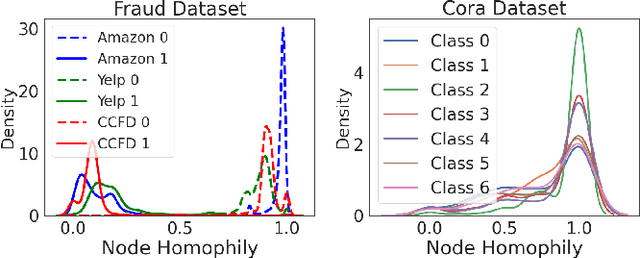
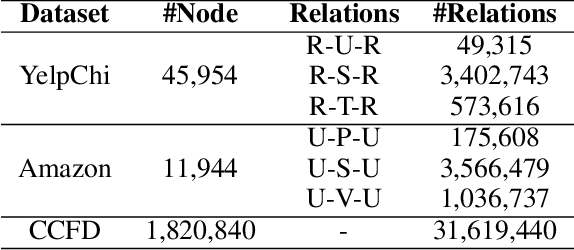
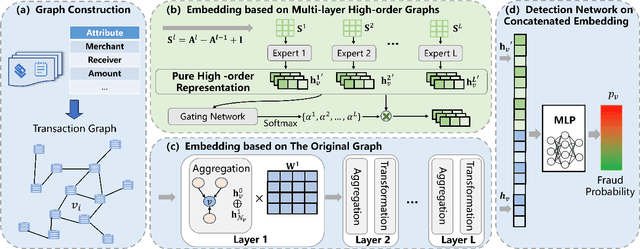
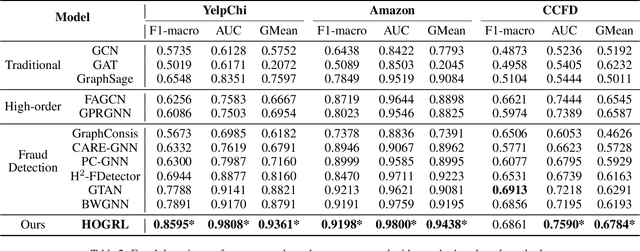
Credit card fraud imposes significant costs on both cardholders and issuing banks. Fraudsters often disguise their crimes, such as using legitimate transactions through several benign users to bypass anti-fraud detection. Existing graph neural network (GNN) models struggle with learning features of camouflaged, indirect multi-hop transactions due to their inherent over-smoothing issues in deep multi-layer aggregation, presenting a major challenge in detecting disguised relationships. Therefore, in this paper, we propose a novel High-order Graph Representation Learning model (HOGRL) to avoid incorporating excessive noise during the multi-layer aggregation process. In particular, HOGRL learns different orders of \emph{pure} representations directly from high-order transaction graphs. We realize this goal by effectively constructing high-order transaction graphs first and then learning the \emph{pure} representations of each order so that the model could identify fraudsters' multi-hop indirect transactions via multi-layer \emph{pure} feature learning. In addition, we introduce a mixture-of-expert attention mechanism to automatically determine the importance of different orders for jointly optimizing fraud detection performance. We conduct extensive experiments in both the open source and real-world datasets, the result demonstrates the significant improvements of our proposed HOGRL compared with state-of-the-art fraud detection baselines. HOGRL's superior performance also proves its effectiveness in addressing high-order fraud camouflage criminals.
* 9 pages, 5 figures, accepted at IJCAI 2024
Detecting the Anomalies in LiDAR Pointcloud
Jul 31, 2023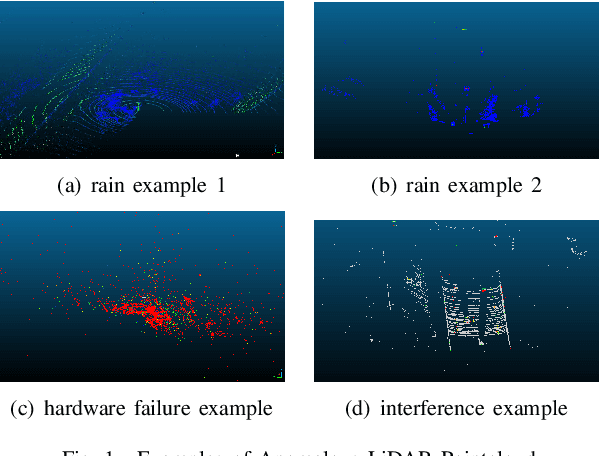
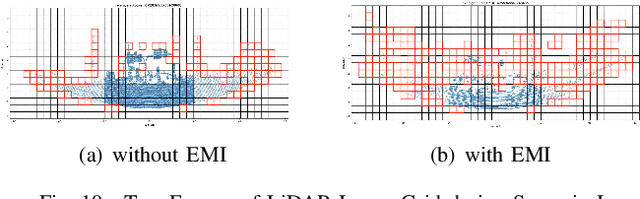
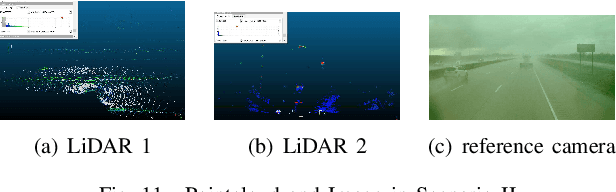
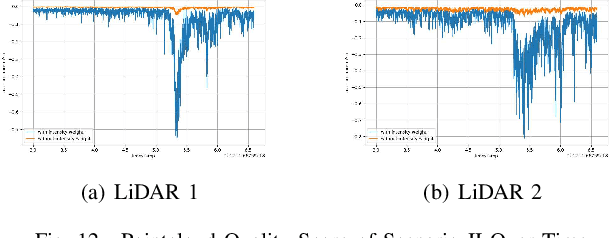
LiDAR sensors play an important role in the perception stack of modern autonomous driving systems. Adverse weather conditions such as rain, fog and dust, as well as some (occasional) LiDAR hardware fault may cause the LiDAR to produce pointcloud with abnormal patterns such as scattered noise points and uncommon intensity values. In this paper, we propose a novel approach to detect whether a LiDAR is generating anomalous pointcloud by analyzing the pointcloud characteristics. Specifically, we develop a pointcloud quality metric based on the LiDAR points' spatial and intensity distribution to characterize the noise level of the pointcloud, which relies on pure mathematical analysis and does not require any labeling or training as learning-based methods do. Therefore, the method is scalable and can be quickly deployed either online to improve the autonomy safety by monitoring anomalies in the LiDAR data or offline to perform in-depth study of the LiDAR behavior over large amount of data. The proposed approach is studied with extensive real public road data collected by LiDARs with different scanning mechanisms and laser spectrums, and is proven to be able to effectively handle various known and unknown sources of pointcloud anomaly.