 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Artificial Intelligence Approach for Interpreting Creative Combinational Designs
May 08, 2024Combinational creativity, a form of creativity involving the blending of familiar ideas, is pivotal in design innovation. While most research focuses on how combinational creativity in design is achieved through blending elements, this study focuses on the computational interpretation, specifically identifying the 'base' and 'additive' components that constitute a creative design. To achieve this goal, the authors propose a heuristic algorithm integrating computer vision and natural language processing technologies, and implement multiple approaches based on both discriminative and generative artificial intelligence architectures. A comprehensive evaluation was conducted on a dataset created for studying combinational creativity. Among the implementations of the proposed algorithm, the most effective approach demonstrated a high accuracy in interpretation, achieving 87.5% for identifying 'base' and 80% for 'additive'. We conduct a modular analysis and an ablation experiment to assess the performance of each part in our implementations. Additionally, the study includes an analysis of error cases and bottleneck issues, providing critical insights into the limitations and challenges inherent in the computational interpretation of creative designs.
Detecting the Anomalies in LiDAR Pointcloud
Jul 31, 2023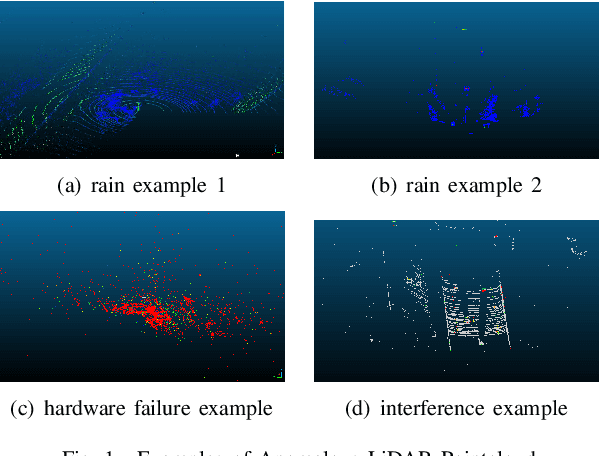
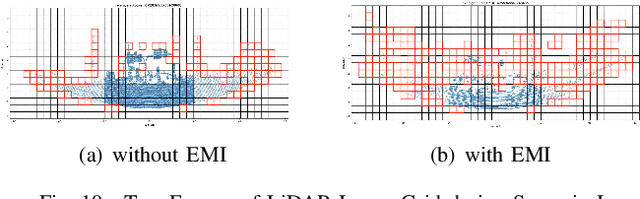
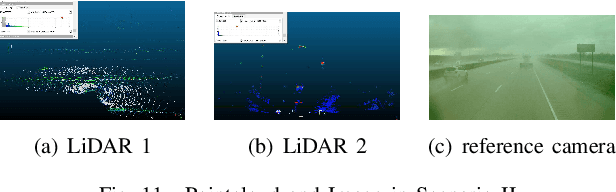
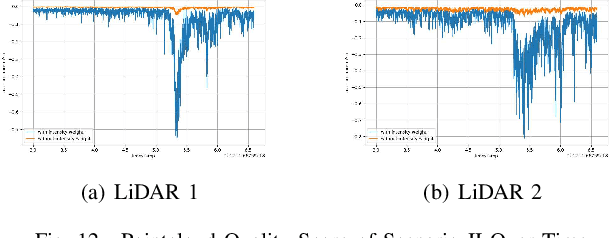
LiDAR sensors play an important role in the perception stack of modern autonomous driving systems. Adverse weather conditions such as rain, fog and dust, as well as some (occasional) LiDAR hardware fault may cause the LiDAR to produce pointcloud with abnormal patterns such as scattered noise points and uncommon intensity values. In this paper, we propose a novel approach to detect whether a LiDAR is generating anomalous pointcloud by analyzing the pointcloud characteristics. Specifically, we develop a pointcloud quality metric based on the LiDAR points' spatial and intensity distribution to characterize the noise level of the pointcloud, which relies on pure mathematical analysis and does not require any labeling or training as learning-based methods do. Therefore, the method is scalable and can be quickly deployed either online to improve the autonomy safety by monitoring anomalies in the LiDAR data or offline to perform in-depth study of the LiDAR behavior over large amount of data. The proposed approach is studied with extensive real public road data collected by LiDARs with different scanning mechanisms and laser spectrums, and is proven to be able to effectively handle various known and unknown sources of pointcloud anomaly.
A Rational Decision Maker with Ordinal Utility under Uncertainty: Optimism and Pessimism
Jun 11, 2010In game theory and artificial intelligence, decision making models often involve maximizing expected utility, which does not respect ordinal invariance. In this paper, the author discusses the possibility of preserving ordinal invariance and still making a rational decision under uncertainty.