 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridgeV2W: Bridging Video Generation Models to Embodied World Models via Embodiment Masks
Feb 03, 2026Embodied world models have emerged as a promising paradigm in robotics, most of which leverage large-scale Internet videos or pretrained video generation models to enrich visual and motion priors. However, they still face key challenges: a misalignment between coordinate-space actions and pixel-space videos, sensitivity to camera viewpoint, and non-unified architectures across embodiments. To this end, we present BridgeV2W, which converts coordinate-space actions into pixel-aligned embodiment masks rendered from the URDF and camera parameters. These masks are then injected into a pretrained video generation model via a ControlNet-style pathway, which aligns the action control signals with predicted videos, adds view-specific conditioning to accommodate camera viewpoints, and yields a unified world model architecture across embodiments. To mitigate overfitting to static backgrounds, BridgeV2W further introduces a flow-based motion loss that focuses on learning dynamic and task-relevant regions. Experiments on single-arm (DROID) and dual-arm (AgiBot-G1) datasets, covering diverse and challenging conditions with unseen viewpoints and scenes, show that BridgeV2W improves video generation quality compared to prior state-of-the-art methods. We further demonstrate the potential of BridgeV2W on downstream real-world tasks, including policy evaluation and goal-conditioned planning. More results can be found on our project website at https://BridgeV2W.github.io .
VERM: Leveraging Foundation Models to Create a Virtual Eye for Efficient 3D Robotic Manipulation
Dec 18, 2025When performing 3D manipulation tasks, robots have to execute action planning based on perceptions from multiple fixed cameras. The multi-camera setup introduces substantial redundancy and irrelevant information, which increases computational costs and forces the model to spend extra training time extracting crucial task-relevant details. To filter out redundant information and accurately extract task-relevant features, we propose the VERM (Virtual Eye for Robotic Manipulation) method, leveraging the knowledge in foundation models to imagine a virtual task-adaptive view from the constructed 3D point cloud, which efficiently captures necessary information and mitigates occlusion. To facilitate 3D action planning and fine-grained manipulation, we further design a depth-aware module and a dynamic coarse-to-fine procedure. Extensive experimental results on both simulation benchmark RLBench and real-world evaluations demonstrate the effectiveness of our method, surpassing previous state-of-the-art methods while achieving 1.89x speedup in training time and 1.54x speedup in inference speed. More results can be found on our project website at https://verm-ral.github.io .
The Ninth NTIRE 2024 Efficient Super-Resolution Challenge Report
Apr 16, 2024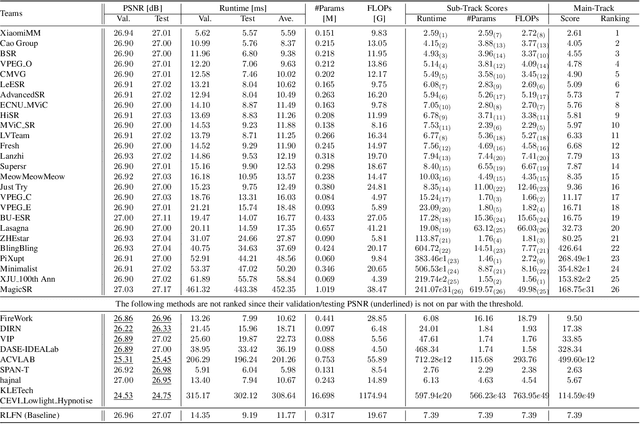
This paper provides a comprehensive review of the NTIRE 2024 challenge, focusing on efficient single-image super-resolution (ESR) solutions and their outcomes. The task of this challenge is to super-resolve an input image with a magnification factor of x4 based on pairs of low and corresponding high-resolution images. The primary objective is to develop networks that optimize various aspects such as runtime, parameters, and FLOPs, while still maintaining a peak signal-to-noise ratio (PSNR) of approximately 26.90 dB on the DIV2K_LSDIR_valid dataset and 26.99 dB on the DIV2K_LSDIR_test dataset. In addition, this challenge has 4 tracks including the main track (overall performance), sub-track 1 (runtime), sub-track 2 (FLOPs), and sub-track 3 (parameters). In the main track, all three metrics (ie runtime, FLOPs, and parameter count) were considered. The ranking of the main track is calculated based on a weighted sum-up of the scores of all other sub-tracks. In sub-track 1, the practical runtime performance of the submissions was evaluated, and the corresponding score was used to determine the ranking. In sub-track 2, the number of FLOPs was considered. The score calculated based on the corresponding FLOPs was used to determine the ranking. In sub-track 3, the number of parameters was considered. The score calculated based on the corresponding parameters was used to determine the ranking. RLFN is set as the baseline for efficiency measurement. The challenge had 262 registered participants, and 34 teams made valid submissions. They gauge the state-of-the-art in efficient single-image super-resolution. To facilitate the reproducibility of the challenge and enable other researchers to build upon these findings, the code and the pre-trained model of validated solutions are made publicly available at https://github.com/Amazingren/NTIRE2024_ESR/.
ETPNav: Evolving Topological Planning for Vision-Language Navigation in Continuous Environments
Apr 07, 2023Vision-language navigation is a task that requires an agent to follow instructions to navigate in environments. It becomes increasingly crucial in the field of embodied AI, with potential applications in autonomous navigation, search and rescue, and human-robot interaction. In this paper, we propose to address a more practical yet challenging counterpart setting - vision-language navigation in continuous environments (VLN-CE). To develop a robust VLN-CE agent, we propose a new navigation framework, ETPNav, which focuses on two critical skills: 1) the capability to abstract environments and generate long-range navigation plans, and 2) the ability of obstacle-avoiding control in continuous environments. ETPNav performs online topological mapping of environments by self-organizing predicted waypoints along a traversed path, without prior environmental experience. It privileges the agent to break down the navigation procedure into high-level planning and low-level control. Concurrently, ETPNav utilizes a transformer-based cross-modal planner to generate navigation plans based on topological maps and instructions. The plan is then performed through an obstacle-avoiding controller that leverages a trial-and-error heuristic to prevent navigation from getting stuck in obstacles. Experimental results demonstrate the effectiveness of the proposed method. ETPNav yields more than 10% and 20% improvements over prior state-of-the-art on R2R-CE and RxR-CE datasets, respectively. Our code is available at https://github.com/MarSaKi/ETPNav.