 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Driving World Model as Synthetic Data Generator for Perception Tasks
Oct 22, 2025Recent advancements in driving world models enable controllable generation of high-quality RGB videos or multimodal videos. Existing methods primarily focus on metrics related to generation quality and controllability. However, they often overlook the evaluation of downstream perception tasks, which are $\mathbf{really\ crucial}$ for the performance of autonomous driving. Existing methods usually leverage a training strategy that first pretrains on synthetic data and finetunes on real data, resulting in twice the epochs compared to the baseline (real data only). When we double the epochs in the baseline, the benefit of synthetic data becomes negligible. To thoroughly demonstrate the benefit of synthetic data, we introduce Dream4Drive, a novel synthetic data generation framework designed for enhancing the downstream perception tasks. Dream4Drive first decomposes the input video into several 3D-aware guidance maps and subsequently renders the 3D assets onto these guidance maps. Finally, the driving world model is fine-tuned to produce the edited, multi-view photorealistic videos, which can be used to train the downstream perception models. Dream4Drive enables unprecedented flexibility in generating multi-view corner cases at scale, significantly boosting corner case perception in autonomous driving. To facilitate future research, we also contribute a large-scale 3D asset dataset named DriveObj3D, covering the typical categories in driving scenarios and enabling diverse 3D-aware video editing. We conduct comprehensive experiments to show that Dream4Drive can effectively boost the performance of downstream perception models under various training epochs. Project: $\href{https://wm-research.github.io/Dream4Drive/}{this\ https\ URL}$
UA-Track: Uncertainty-Aware End-to-End 3D Multi-Object Tracking
Jun 04, 2024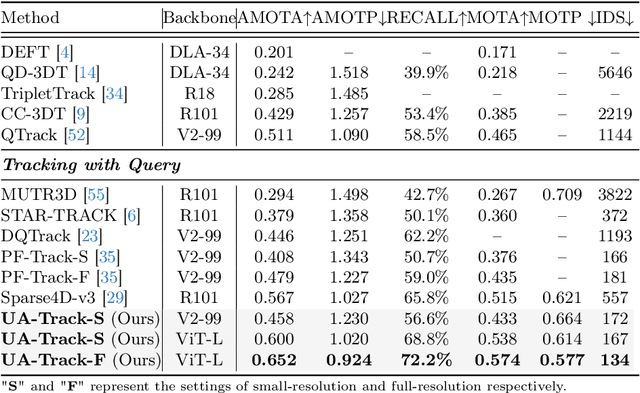
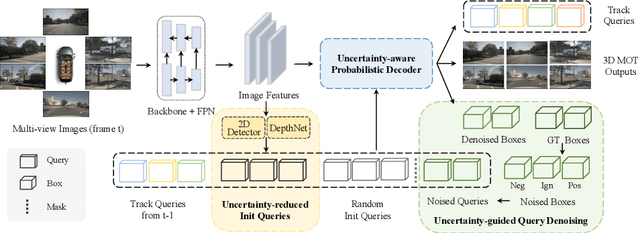
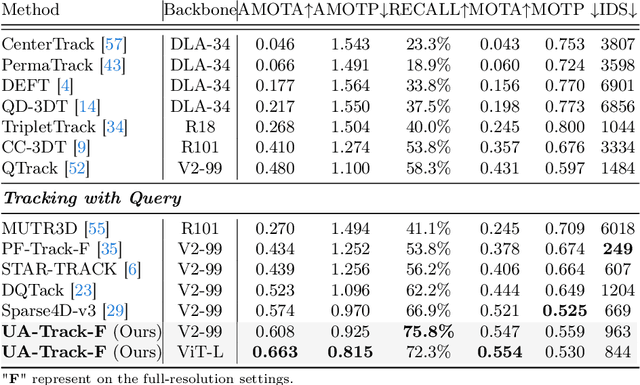

3D multiple object tracking (MOT) plays a crucial role in autonomous driving perception. Recent end-to-end query-based trackers simultaneously detect and track objects, which have shown promising potential for the 3D MOT task. However, existing methods overlook the uncertainty issue, which refers to the lack of precise confidence about the state and location of tracked objects. Uncertainty arises owing to various factors during motion observation by cameras, especially occlusions and the small size of target objects, resulting in an inaccurate estimation of the object's position, label, and identity. To this end, we propose an Uncertainty-Aware 3D MOT framework, UA-Track, which tackles the uncertainty problem from multiple aspects. Specifically, we first introduce an Uncertainty-aware Probabilistic Decoder to capture the uncertainty in object prediction with probabilistic attention. Secondly, we propose an Uncertainty-guided Query Denoising strategy to further enhance the training process. We also utilize Uncertainty-reduced Query Initialization, which leverages predicted 2D object location and depth information to reduce query uncertainty. As a result, our UA-Track achieves state-of-the-art performance on the nuScenes benchmark, i.e., 66.3% AMOTA on the test split, surpassing the previous best end-to-end solution by a significant margin of 8.9% AMOTA.