 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual Attribute-Spatial Relation Alignment for 3D Visual Grounding
Jun 13, 2024



3D visual grounding is an emerging research area dedicated to making connections between the 3D physical world and natural language, which is crucial for achieving embodied intelligence. In this paper, we propose DASANet, a Dual Attribute-Spatial relation Alignment Network that separately models and aligns object attributes and spatial relation features between language and 3D vision modalities. We decompose both the language and 3D point cloud input into two separate parts and design a dual-branch attention module to separately model the decomposed inputs while preserving global context in attribute-spatial feature fusion by cross attentions. Our DASANet achieves the highest grounding accuracy 65.1% on the Nr3D dataset, 1.3% higher than the best competitor. Besides, the visualization of the two branches proves that our method is efficient and highly interpretable.
GaussianPro: 3D Gaussian Splatting with Progressive Propagation
Feb 22, 2024



The advent of 3D Gaussian Splatting (3DGS) has recently brought about a revolution in the field of neural rendering, facilitating high-quality renderings at real-time speed. However, 3DGS heavily depends on the initialized point cloud produced by Structure-from-Motion (SfM) techniques. When tackling with large-scale scenes that unavoidably contain texture-less surfaces, the SfM techniques always fail to produce enough points in these surfaces and cannot provide good initialization for 3DGS. As a result, 3DGS suffers from difficult optimization and low-quality renderings. In this paper, inspired by classical multi-view stereo (MVS) techniques, we propose GaussianPro, a novel method that applies a progressive propagation strategy to guide the densification of the 3D Gaussians. Compared to the simple split and clone strategies used in 3DGS, our method leverages the priors of the existing reconstructed geometries of the scene and patch matching techniques to produce new Gaussians with accurate positions and orientations. Experiments on both large-scale and small-scale scenes validate the effectiveness of our method, where our method significantly surpasses 3DGS on the Waymo dataset, exhibiting an improvement of 1.15dB in terms of PSNR.
DPF-Net: Combining Explicit Shape Priors in Deformable Primitive Field for Unsupervised Structural Reconstruction of 3D Objects
Aug 25, 2023



Unsupervised methods for reconstructing structures face significant challenges in capturing the geometric details with consistent structures among diverse shapes of the same category. To address this issue, we present a novel unsupervised structural reconstruction method, named DPF-Net, based on a new Deformable Primitive Field (DPF) representation, which allows for high-quality shape reconstruction using parameterized geometric primitives. We design a two-stage shape reconstruction pipeline which consists of a primitive generation module and a primitive deformation module to approximate the target shape of each part progressively. The primitive generation module estimates the explicit orientation, position, and size parameters of parameterized geometric primitives, while the primitive deformation module predicts a dense deformation field based on a parameterized primitive field to recover shape details. The strong shape prior encoded in parameterized geometric primitives enables our DPF-Net to extract high-level structures and recover fine-grained shape details consistently. The experimental results on three categories of objects in diverse shapes demonstrate the effectiveness and generalization ability of our DPF-Net on structural reconstruction and shape segmentation.
MovingParts: Motion-based 3D Part Discovery in Dynamic Radiance Field
Mar 10, 2023We present MovingParts, a NeRF-based method for dynamic scene reconstruction and part discovery. We consider motion as an important cue for identifying parts, that all particles on the same part share the common motion pattern. From the perspective of fluid simulation, existing deformation-based methods for dynamic NeRF can be seen as parameterizing the scene motion under the Eulerian view, i.e., focusing on specific locations in space through which the fluid flows as time passes. However, it is intractable to extract the motion of constituting objects or parts using the Eulerian view representation. In this work, we introduce the dual Lagrangian view and enforce representations under the Eulerian/Lagrangian views to be cycle-consistent. Under the Lagrangian view, we parameterize the scene motion by tracking the trajectory of particles on objects. The Lagrangian view makes it convenient to discover parts by factorizing the scene motion as a composition of part-level rigid motions. Experimentally, our method can achieve fast and high-quality dynamic scene reconstruction from even a single moving camera, and the induced part-based representation allows direct applications of part tracking, animation, 3D scene editing, etc.
Unsupervised Learning for Cuboid Shape Abstraction via Joint Segmentation from Point Clouds
Jun 07, 2021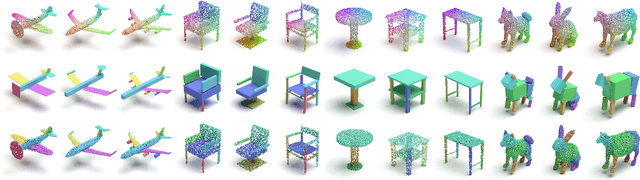


Representing complex 3D objects as simple geometric primitives, known as shape abstraction, is important for geometric modeling, structural analysis, and shape synthesis. In this paper, we propose an unsupervised shape abstraction method to map a point cloud into a compact cuboid representation. We jointly predict cuboid allocation as part segmentation and cuboid shapes and enforce the consistency between the segmentation and shape abstraction for self-learning. For the cuboid abstraction task, we transform the input point cloud into a set of parametric cuboids using a variational auto-encoder network. The segmentation network allocates each point into a cuboid considering the point-cuboid affinity. Without manual annotations of parts in point clouds, we design four novel losses to jointly supervise the two branches in terms of geometric similarity and cuboid compactness. We evaluate our method on multiple shape collections and demonstrate its superiority over existing shape abstraction methods. Moreover, based on our network architecture and learned representations, our approach supports various applications including structured shape generation, shape interpolation, and structural shape clustering.