 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDrift-Bench: Diagnosing Cooperative Breakdowns in LLM Agents under Input Faults via Multi-Turn Interaction
Feb 02, 2026As Large Language Models transition to autonomous agents, user inputs frequently violate cooperative assumptions (e.g., implicit intent, missing parameters, false presuppositions, or ambiguous expressions), creating execution risks that text-only evaluations do not capture. Existing benchmarks typically assume well-specified instructions or restrict evaluation to text-only, single-turn clarification, and thus do not measure multi-turn disambiguation under grounded execution risk. We introduce \textbf{Drift-Bench}, the first diagnostic benchmark that evaluates agentic pragmatics under input faults through multi-turn clarification across state-oriented and service-oriented execution environments. Grounded in classical theories of communication, \textbf{Drift-Bench} provides a unified taxonomy of cooperative breakdowns and employs a persona-driven user simulator with the \textbf{Rise} evaluation protocol. Experiments show substantial performance drops under these faults, with clarification effectiveness varying across user personas and fault types. \MethodName bridges clarification research and agent safety evaluation, enabling systematic diagnosis of failures that can lead to unsafe executions.
BLURR: A Boosted Low-Resource Inference for Vision-Language-Action Models
Dec 12, 2025Vision-language-action (VLA) models enable impressive zero shot manipulation, but their inference stacks are often too heavy for responsive web demos or high frequency robot control on commodity GPUs. We present BLURR, a lightweight inference wrapper that can be plugged into existing VLA controllers without retraining or changing model checkpoints. Instantiated on the pi-zero VLA controller, BLURR keeps the original observation interfaces and accelerates control by combining an instruction prefix key value cache, mixed precision execution, and a single step rollout schedule that reduces per step computation. In our SimplerEnv based evaluation, BLURR maintains task success rates comparable to the original controller while significantly lowering effective FLOPs and wall clock latency. We also build an interactive web demo that allows users to switch between controllers and toggle inference options in real time while watching manipulation episodes. This highlights BLURR as a practical approach for deploying modern VLA policies under tight compute budgets.
Linear Spherical Sliced Optimal Transport: A Fast Metric for Comparing Spherical Data
Nov 09, 2024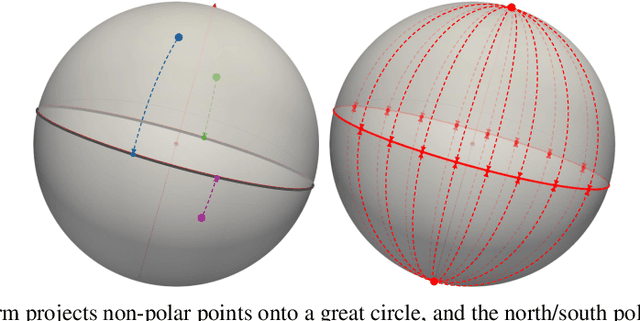
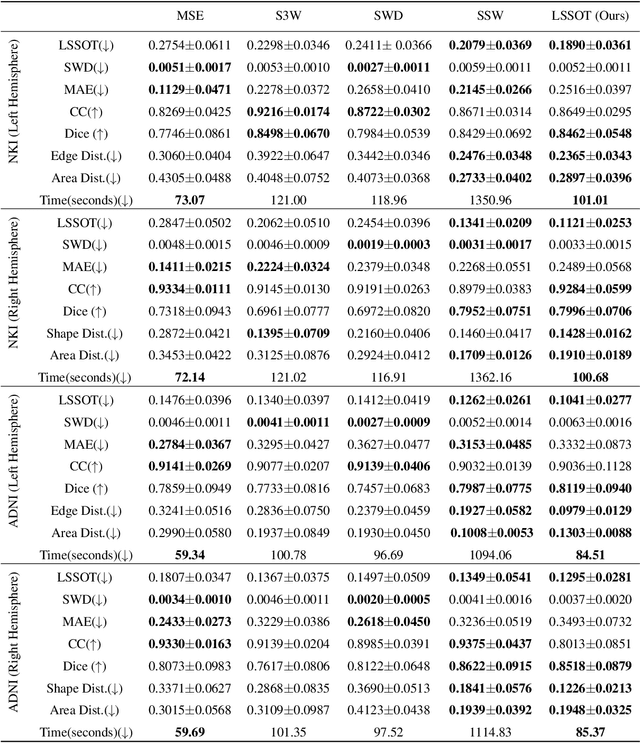
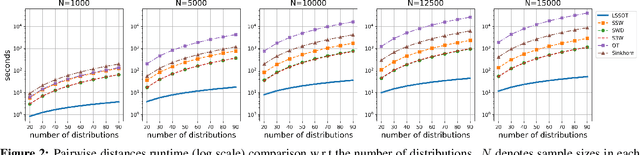
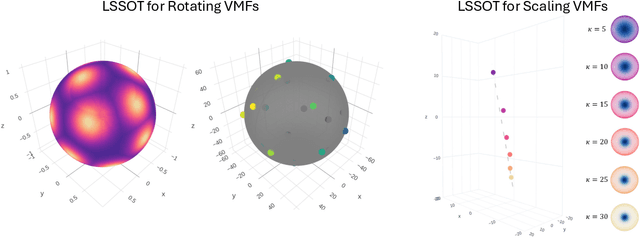
Efficient comparison of spherical probability distributions becomes important in fields such as computer vision, geosciences, and medicine. Sliced optimal transport distances, such as spherical and stereographic spherical sliced Wasserstein distances, have recently been developed to address this need. These methods reduce the computational burden of optimal transport by slicing hyperspheres into one-dimensional projections, i.e., lines or circles. Concurrently, linear optimal transport has been proposed to embed distributions into \( L^2 \) spaces, where the \( L^2 \) distance approximates the optimal transport distance, thereby simplifying comparisons across multiple distributions. In this work, we introduce the Linear Spherical Sliced Optimal Transport (LSSOT) framework, which utilizes slicing to embed spherical distributions into \( L^2 \) spaces while preserving their intrinsic geometry, offering a computationally efficient metric for spherical probability measures. We establish the metricity of LSSOT and demonstrate its superior computational efficiency in applications such as cortical surface registration, 3D point cloud interpolation via gradient flow, and shape embedding. Our results demonstrate the significant computational benefits and high accuracy of LSSOT in these applications.