 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMVISTA-4D: View-Consistent 4D World Model with Test-Time Action Inference for Robotic Manipulation
Feb 10, 2026World-model-based imagine-then-act becomes a promising paradigm for robotic manipulation, yet existing approaches typically support either purely image-based forecasting or reasoning over partial 3D geometry, limiting their ability to predict complete 4D scene dynamics. This work proposes a novel embodied 4D world model that enables geometrically consistent, arbitrary-view RGBD generation: given only a single-view RGBD observation as input, the model imagines the remaining viewpoints, which can then be back-projected and fused to assemble a more complete 3D structure across time. To efficiently learn the multi-view, cross-modality generation, we explicitly design cross-view and cross-modality feature fusion that jointly encourage consistency between RGB and depth and enforce geometric alignment across views. Beyond prediction, converting generated futures into actions is often handled by inverse dynamics, which is ill-posed because multiple actions can explain the same transition. We address this with a test-time action optimization strategy that backpropagates through the generative model to infer a trajectory-level latent best matching the predicted future, and a residual inverse dynamics model that turns this trajectory prior into accurate executable actions. Experiments on three datasets demonstrate strong performance on both 4D scene generation and downstream manipulation, and ablations provide practical insights into the key design choices.
DEGS: Deformable Event-based 3D Gaussian Splatting from RGB and Event Stream
Oct 09, 2025Reconstructing Dynamic 3D Gaussian Splatting (3DGS) from low-framerate RGB videos is challenging. This is because large inter-frame motions will increase the uncertainty of the solution space. For example, one pixel in the first frame might have more choices to reach the corresponding pixel in the second frame. Event cameras can asynchronously capture rapid visual changes and are robust to motion blur, but they do not provide color information. Intuitively, the event stream can provide deterministic constraints for the inter-frame large motion by the event trajectories. Hence, combining low-temporal-resolution images with high-framerate event streams can address this challenge. However, it is challenging to jointly optimize Dynamic 3DGS using both RGB and event modalities due to the significant discrepancy between these two data modalities. This paper introduces a novel framework that jointly optimizes dynamic 3DGS from the two modalities. The key idea is to adopt event motion priors to guide the optimization of the deformation fields. First, we extract the motion priors encoded in event streams by using the proposed LoCM unsupervised fine-tuning framework to adapt an event flow estimator to a certain unseen scene. Then, we present the geometry-aware data association method to build the event-Gaussian motion correspondence, which is the primary foundation of the pipeline, accompanied by two useful strategies, namely motion decomposition and inter-frame pseudo-label. Extensive experiments show that our method outperforms existing image and event-based approaches across synthetic and real scenes and prove that our method can effectively optimize dynamic 3DGS with the help of event data.
Pandora: Leveraging Code-driven Knowledge Transfer for Unified Structured Knowledge Reasoning
Aug 25, 2025Unified Structured Knowledge Reasoning (USKR) aims to answer natural language questions by using structured sources such as tables, databases, and knowledge graphs in a unified way. Existing USKR methods rely on task-specific strategies or bespoke representations, which hinder their ability to dismantle barriers between different SKR tasks, thereby constraining their overall performance in cross-task scenarios. In this paper, we introduce \textsc{Pandora}, a novel USKR framework that addresses the limitations of existing methods by leveraging two key innovations. First, we propose a code-based unified knowledge representation using \textsc{Python}'s \textsc{Pandas} API, which aligns seamlessly with the pre-training of LLMs. This representation facilitates a cohesive approach to handling different structured knowledge sources. Building on this foundation, we employ knowledge transfer to bolster the unified reasoning process of LLMs by automatically building cross-task memory. By adaptively correcting reasoning using feedback from code execution, \textsc{Pandora} showcases impressive unified reasoning capabilities. Extensive experiments on six widely used benchmarks across three SKR tasks demonstrate that \textsc{Pandora} outperforms existing unified reasoning frameworks and competes effectively with task-specific methods.
Pandora: A Code-Driven Large Language Model Agent for Unified Reasoning Across Diverse Structured Knowledge
Apr 17, 2025



Unified Structured Knowledge Reasoning (USKR) aims to answer natural language questions (NLQs) by using structured sources such as tables, databases, and knowledge graphs in a unified way. Existing USKR methods either rely on employing task-specific strategies or custom-defined representations, which struggle to leverage the knowledge transfer between different SKR tasks or align with the prior of LLMs, thereby limiting their performance. This paper proposes a novel USKR framework named \textsc{Pandora}, which takes advantage of \textsc{Python}'s \textsc{Pandas} API to construct a unified knowledge representation for alignment with LLM pre-training. It employs an LLM to generate textual reasoning steps and executable Python code for each question. Demonstrations are drawn from a memory of training examples that cover various SKR tasks, facilitating knowledge transfer. Extensive experiments on four benchmarks involving three SKR tasks demonstrate that \textsc{Pandora} outperforms existing unified frameworks and competes effectively with task-specific methods.
DEL: Discrete Element Learner for Learning 3D Particle Dynamics with Neural Rendering
Oct 11, 2024



Learning-based simulators show great potential for simulating particle dynamics when 3D groundtruth is available, but per-particle correspondences are not always accessible. The development of neural rendering presents a new solution to this field to learn 3D dynamics from 2D images by inverse rendering. However, existing approaches still suffer from ill-posed natures resulting from the 2D to 3D uncertainty, for example, specific 2D images can correspond with various 3D particle distributions. To mitigate such uncertainty, we consider a conventional, mechanically interpretable framework as the physical priors and extend it to a learning-based version. In brief, we incorporate the learnable graph kernels into the classic Discrete Element Analysis (DEA) framework to implement a novel mechanics-integrated learning system. In this case, the graph network kernels are only used for approximating some specific mechanical operators in the DEA framework rather than the whole dynamics mapping. By integrating the strong physics priors, our methods can effectively learn the dynamics of various materials from the partial 2D observations in a unified manner. Experiments show that our approach outperforms other learned simulators by a large margin in this context and is robust to different renderers, fewer training samples, and fewer camera views.
PFGS: High Fidelity Point Cloud Rendering via Feature Splatting
Jul 04, 2024



Rendering high-fidelity images from sparse point clouds is still challenging. Existing learning-based approaches suffer from either hole artifacts, missing details, or expensive computations. In this paper, we propose a novel framework to render high-quality images from sparse points. This method first attempts to bridge the 3D Gaussian Splatting and point cloud rendering, which includes several cascaded modules. We first use a regressor to estimate Gaussian properties in a point-wise manner, the estimated properties are used to rasterize neural feature descriptors into 2D planes which are extracted from a multiscale extractor. The projected feature volume is gradually decoded toward the final prediction via a multiscale and progressive decoder. The whole pipeline experiences a two-stage training and is driven by our well-designed progressive and multiscale reconstruction loss. Experiments on different benchmarks show the superiority of our method in terms of rendering qualities and the necessities of our main components.
Query-based Semantic Gaussian Field for Scene Representation in Reinforcement Learning
Jun 04, 2024



Latent scene representation plays a significant role in training reinforcement learning (RL) agents. To obtain good latent vectors describing the scenes, recent works incorporate the 3D-aware latent-conditioned NeRF pipeline into scene representation learning. However, these NeRF-related methods struggle to perceive 3D structural information due to the inefficient dense sampling in volumetric rendering. Moreover, they lack fine-grained semantic information included in their scene representation vectors because they evenly consider free and occupied spaces. Both of them can destroy the performance of downstream RL tasks. To address the above challenges, we propose a novel framework that adopts the efficient 3D Gaussian Splatting (3DGS) to learn 3D scene representation for the first time. In brief, we present the Query-based Generalizable 3DGS to bridge the 3DGS technique and scene representations with more geometrical awareness than those in NeRFs. Moreover, we present the Hierarchical Semantics Encoding to ground the fine-grained semantic features to 3D Gaussians and further distilled to the scene representation vectors. We conduct extensive experiments on two RL platforms including Maniskill2 and Robomimic across 10 different tasks. The results show that our method outperforms the other 5 baselines by a large margin. We achieve the best success rates on 8 tasks and the second-best on the other two tasks.
EvGGS: A Collaborative Learning Framework for Event-based Generalizable Gaussian Splatting
May 23, 2024


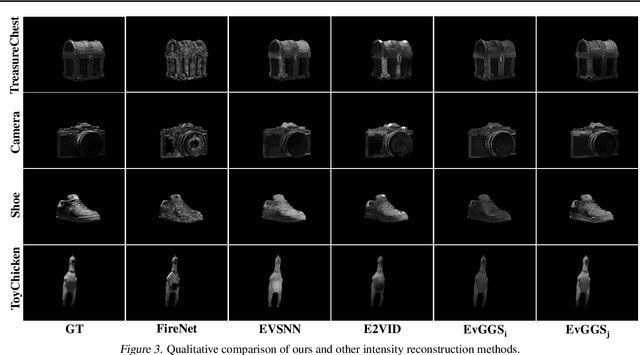
Event cameras offer promising advantages such as high dynamic range and low latency, making them well-suited for challenging lighting conditions and fast-moving scenarios. However, reconstructing 3D scenes from raw event streams is difficult because event data is sparse and does not carry absolute color information. To release its potential in 3D reconstruction, we propose the first event-based generalizable 3D reconstruction framework, called EvGGS, which reconstructs scenes as 3D Gaussians from only event input in a feedforward manner and can generalize to unseen cases without any retraining. This framework includes a depth estimation module, an intensity reconstruction module, and a Gaussian regression module. These submodules connect in a cascading manner, and we collaboratively train them with a designed joint loss to make them mutually promote. To facilitate related studies, we build a novel event-based 3D dataset with various material objects and calibrated labels of grayscale images, depth maps, camera poses, and silhouettes. Experiments show models that have jointly trained significantly outperform those trained individually. Our approach performs better than all baselines in reconstruction quality, and depth/intensity predictions with satisfactory rendering speed.
Physical Priors Augmented Event-Based 3D Reconstruction
Jan 30, 20243D neural implicit representations play a significant component in many robotic applications. However, reconstructing neural radiance fields (NeRF) from realistic event data remains a challenge due to the sparsities and the lack of information when only event streams are available. In this paper, we utilize motion, geometry, and density priors behind event data to impose strong physical constraints to augment NeRF training. The proposed novel pipeline can directly benefit from those priors to reconstruct 3D scenes without additional inputs. Moreover, we present a novel density-guided patch-based sampling strategy for robust and efficient learning, which not only accelerates training procedures but also conduces to expressions of local geometries. More importantly, we establish the first large dataset for event-based 3D reconstruction, which contains 101 objects with various materials and geometries, along with the groundtruth of images and depth maps for all camera viewpoints, which significantly facilitates other research in the related fields. The code and dataset will be publicly available at https://github.com/Mercerai/PAEv3d.