 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConditional Temporal Attention Networks for Neonatal Cortical Surface Reconstruction
Jul 21, 2023Cortical surface reconstruction plays a fundamental role in modeling the rapid brain development during the perinatal period. In this work, we propose Conditional Temporal Attention Network (CoTAN), a fast end-to-end framework for diffeomorphic neonatal cortical surface reconstruction. CoTAN predicts multi-resolution stationary velocity fields (SVF) from neonatal brain magnetic resonance images (MRI). Instead of integrating multiple SVFs, CoTAN introduces attention mechanisms to learn a conditional time-varying velocity field (CTVF) by computing the weighted sum of all SVFs at each integration step. The importance of each SVF, which is estimated by learned attention maps, is conditioned on the age of the neonates and varies with the time step of integration. The proposed CTVF defines a diffeomorphic surface deformation, which reduces mesh self-intersection errors effectively. It only requires 0.21 seconds to deform an initial template mesh to cortical white matter and pial surfaces for each brain hemisphere. CoTAN is validated on the Developing Human Connectome Project (dHCP) dataset with 877 3D brain MR images acquired from preterm and term born neonates. Compared to state-of-the-art baselines, CoTAN achieves superior performance with only 0.12mm geometric error and 0.07% self-intersecting faces. The visualization of our attention maps illustrates that CoTAN indeed learns coarse-to-fine surface deformations automatically without intermediate supervision.
CAS-Net: Conditional Atlas Generation and Brain Segmentation for Fetal MRI
May 17, 2022Fetal Magnetic Resonance Imaging (MRI) is used in prenatal diagnosis and to assess early brain development. Accurate segmentation of the different brain tissues is a vital step in several brain analysis tasks, such as cortical surface reconstruction and tissue thickness measurements. Fetal MRI scans, however, are prone to motion artifacts that can affect the correctness of both manual and automatic segmentation techniques. In this paper, we propose a novel network structure that can simultaneously generate conditional atlases and predict brain tissue segmentation, called CAS-Net. The conditional atlases provide anatomical priors that can constrain the segmentation connectivity, despite the heterogeneity of intensity values caused by motion or partial volume effects. The proposed method is trained and evaluated on 253 subjects from the developing Human Connectome Project (dHCP). The results demonstrate that the proposed method can generate conditional age-specific atlas with sharp boundary and shape variance. It also segment multi-category brain tissues for fetal MRI with a high overall Dice similarity coefficient (DSC) of $85.2\%$ for the selected 9 tissue labels.
k-t NEXT: Dynamic MR Image Reconstruction Exploiting Spatio-temporal Correlations
Jul 22, 2019
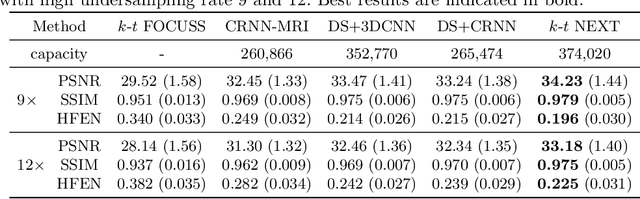


Dynamic magnetic resonance imaging (MRI) exhibits high correlations in k-space and time. In order to accelerate the dynamic MR imaging and to exploit k-t correlations from highly undersampled data, here we propose a novel deep learning based approach for dynamic MR image reconstruction, termed k-t NEXT (k-t NEtwork with X-f Transform). In particular, inspired by traditional methods such as k-t BLAST and k-t FOCUSS, we propose to reconstruct the true signals from aliased signals in x-f domain to exploit the spatio-temporal redundancies. Building on that, the proposed method then learns to recover the signals by alternating the reconstruction process between the x-f space and image space in an iterative fashion. This enables the network to effectively capture useful information and jointly exploit spatio-temporal correlations from both complementary domains. Experiments conducted on highly undersampled short-axis cardiac cine MRI scans demonstrate that our proposed method outperforms the current state-of-the-art dynamic MR reconstruction approaches both quantitatively and qualitatively.
Robotic-assisted Ultrasound for Fetal Imaging: Evolution from Single-arm to Dual-arm System
Apr 10, 2019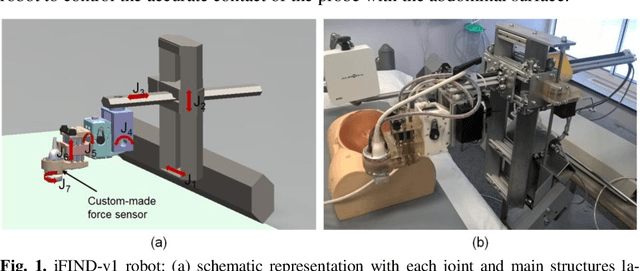
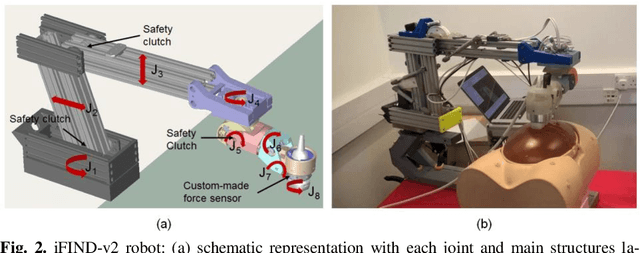
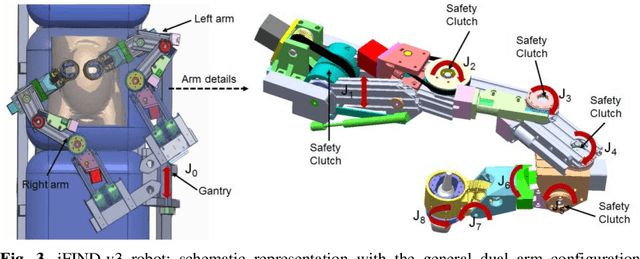
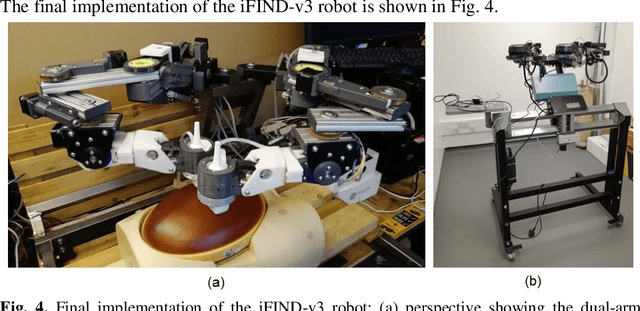
The development of robotic-assisted extracorporeal ultrasound systems has a long history and a number of projects have been proposed since the 1990s focusing on different technical aspects. These aim to resolve the deficiencies of on-site manual manipulation of hand-held ultrasound probes. This paper presents the recent ongoing developments of a series of bespoke robotic systems, including both single-arm and dual-arm versions, for a project known as intelligent Fetal Imaging and Diagnosis (iFIND). After a brief review of the development history of the extracorporeal ultrasound robotic system used for fetal and abdominal examinations, the specific aim of the iFIND robots, the design evolution, the implementation details of each version, and the initial clinical feedback of the iFIND robot series are presented. Based on the preliminary testing of these newly-proposed robots on 42 volunteers, the successful and re-liable working of the mechatronic systems were validated. Analysis of a participant questionnaire indicates a comfortable scanning experience for the volunteers and a good acceptance rate to being scanned by the robots.