 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssessing Ranking and Effectiveness of Evolutionary Algorithm Hyperparameters Using Global Sensitivity Analysis Methodologies
Jul 11, 2022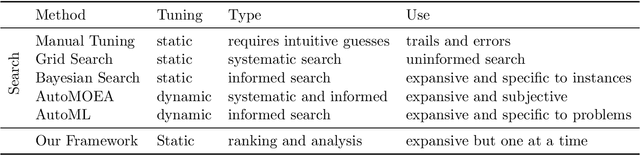
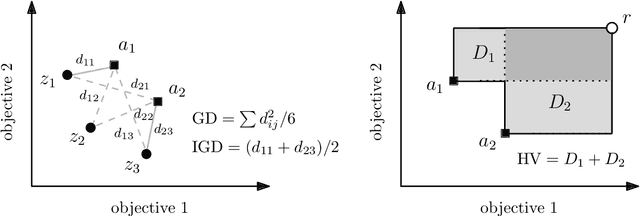
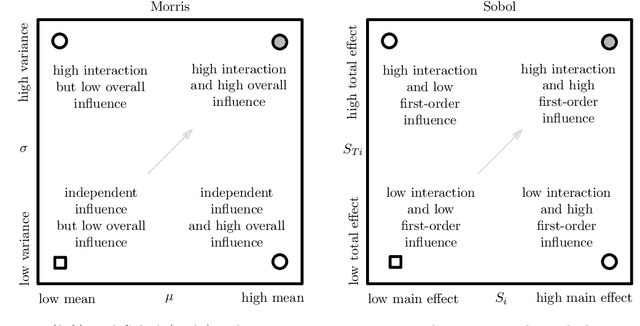
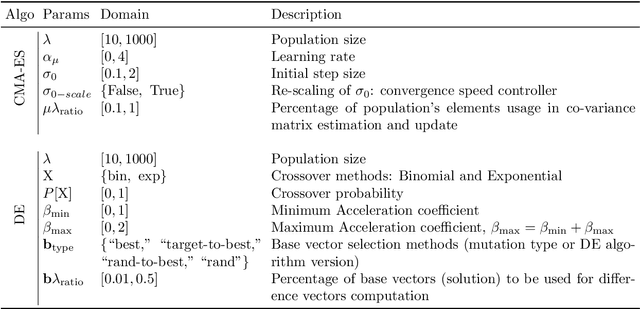
We present a comprehensive global sensitivity analysis of two single-objective and two multi-objective state-of-the-art global optimization evolutionary algorithms as an algorithm configuration problem. That is, we investigate the quality of influence hyperparameters have on the performance of algorithms in terms of their direct effect and interaction effect with other hyperparameters. Using three sensitivity analysis methods, Morris LHS, Morris, and Sobol, to systematically analyze tunable hyperparameters of covariance matrix adaptation evolutionary strategy, differential evolution, non-dominated sorting genetic algorithm III, and multi-objective evolutionary algorithm based on decomposition, the framework reveals the behaviors of hyperparameters to sampling methods and performance metrics. That is, it answers questions like what hyperparameters influence patterns, how they interact, how much they interact, and how much their direct influence is. Consequently, the ranking of hyperparameters suggests their order of tuning, and the pattern of influence reveals the stability of the algorithms.
Morpho-evolution with learning using a controller archive as an inheritance mechanism
Apr 09, 2021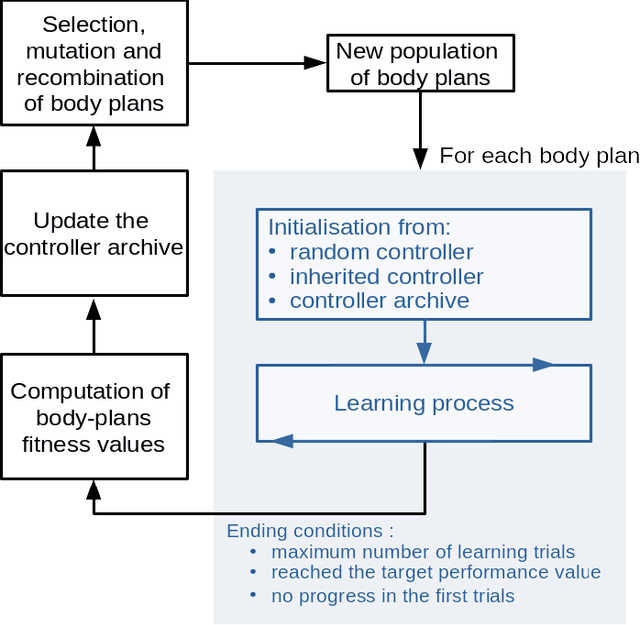
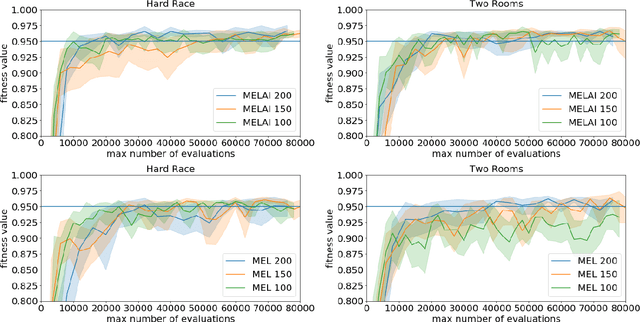
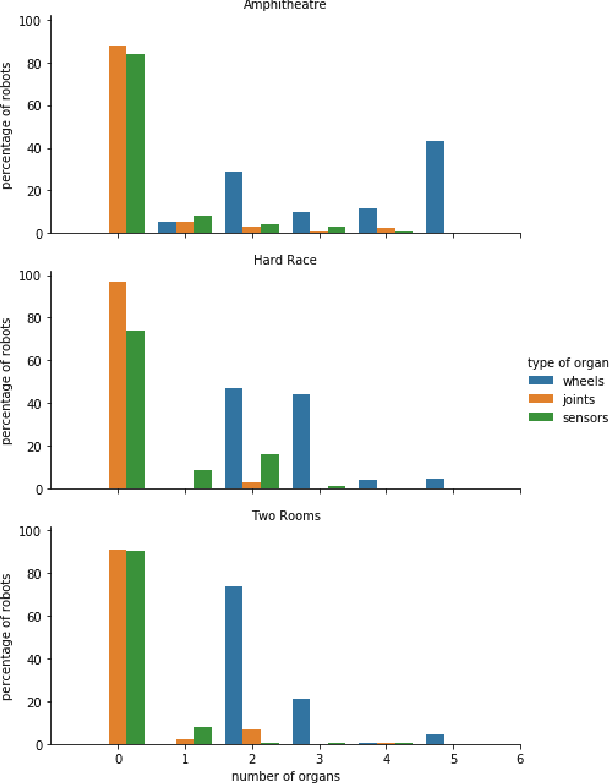
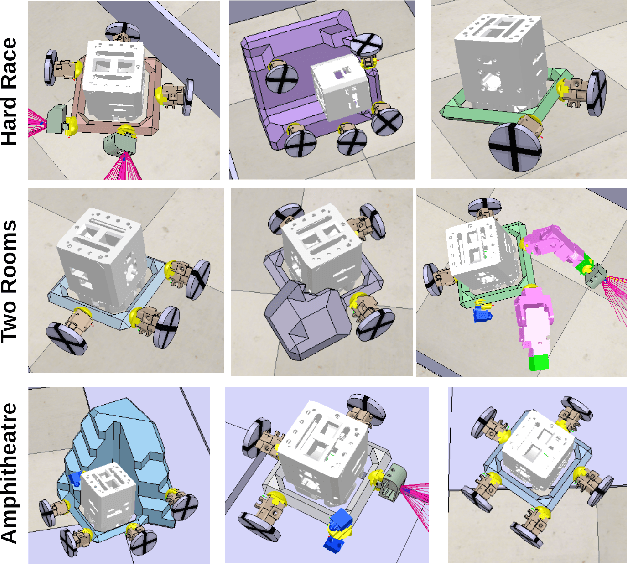
In evolutionary robotics, several approaches have been shown to be capable of the joint optimisation of body-plans and controllers by either using only evolution or combining evolution and learning. When working in rich morphological spaces, it is common for offspring to have body-plans that are very different from either of their parents, which can cause difficulties with respect to inheriting a suitable controller. To address this, we propose a framework that combines an evolutionary algorithm to generate body-plans and a learning algorithm to optimise the parameters of a neural controller where the topology of this controller is created once the body-plan of each offspring body-plan is generated. The key novelty of the approach is to add an external archive for storing learned controllers that map to explicit `types' of robots (where this is defined with respect the features of the body-plan). By inheriting an appropriate controller from the archive rather than learning from a randomly initialised one, we show that both the speed and magnitude of learning increases over time when compared to an approach that starts from scratch, using three different test-beds. The framework also provides new insights into the complex interactions between evolution and learning, and the role of morphological intelligence in robot design.
Cognitively-inspired homeostatic architecture can balance conflicting needs in robots
Nov 25, 2018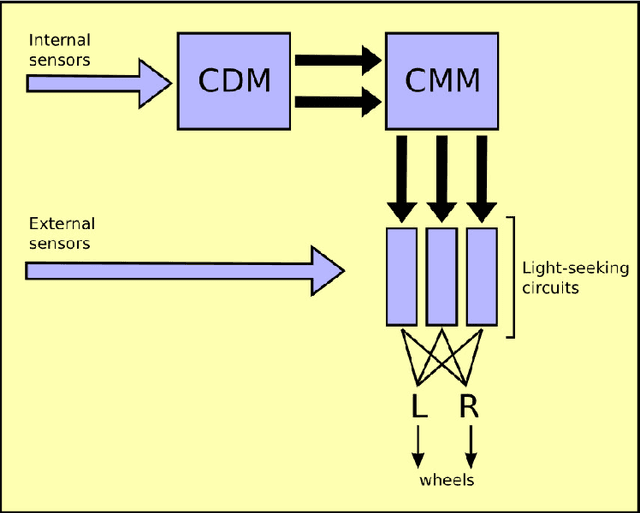

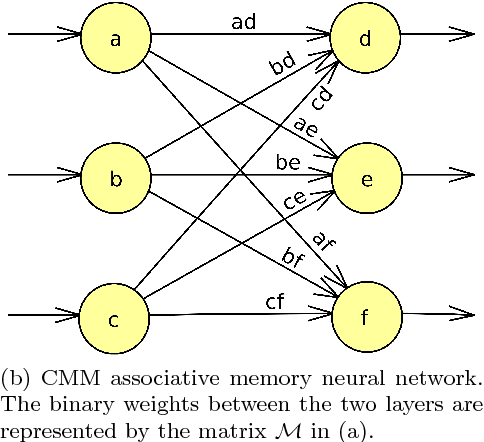
Autonomous robots require the ability to balance conflicting needs, such as whether to charge a battery rather than complete a task. Nature has evolved a mechanism for achieving this in the form of homeostasis. This paper presents CogSis, a cognition-inspired architecture for artificial homeostasis. CogSis provides a robot with the ability to balance conflicting needs so that it can maintain its internal state, while still completing its tasks. Through the use of an associative memory neural network, a robot running CogSis is able to learn about its environment rapidly by making associations between sensors. Results show that a Pi-Swarm robot running CogSis can balance charging its battery with completing a task, and can balance conflicting needs, such as charging its battery without overheating. The lab setup consists of a charging station and high-temperature region, demarcated with coloured lamps. The robot associates the colour of a lamp with the effect it has on the robot's internal environment (for example, charging the battery). The robot can then seek out that colour again when it runs low on charge. This work is the first control architecture that takes inspiration directly from distributed cognition. The result is an architecture that is able to learn and apply environmental knowledge rapidly, implementing homeostatic behaviour and balancing conflicting decisions.
From Formalised State Machines to Implementations of Robotic Controllers
Feb 06, 2017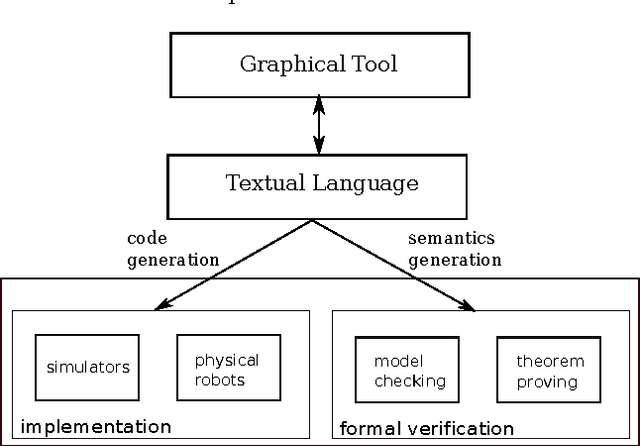
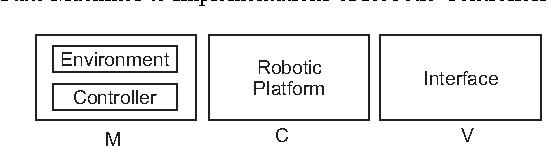

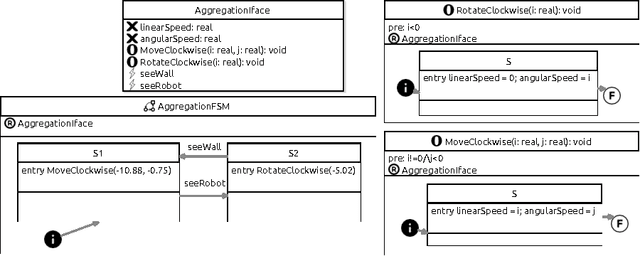
Controllers for autonomous robotic systems can be specified using state machines. However, these are typically developed in an ad hoc manner without formal semantics, which makes it difficult to analyse the controller. Simulations are often used during the development, but a rigorous connection between the designed controller and the implementation is often overlooked. This paper presents a state-machine based notation, RoboChart, together with a tool to automatically create code from the state machines, establishing a rigorous connection between specification and implementation. In RoboChart, a robot's controller is specified either graphically or using a textual description language. The controller code for simulation is automatically generated through a direct mapping from the specification. We demonstrate our approach using two case studies (self-organized aggregation and swarm taxis) in swarm robotics. The simulations are presented using two different simulators showing the general applicability of our approach.
Collective Adaptive Systems: Challenges Beyond Evolvability
Aug 29, 2011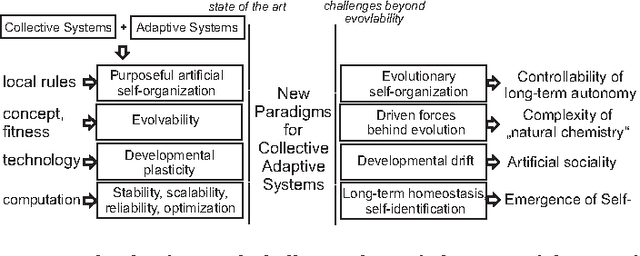
This position paper overviews several challenges of collective adaptive systems, which are beyond the research objectives of current top-projects in ICT, and especially in FET, initiatives. The attention is paid not only to challenges and new research topics, but also to their impact and potential breakthroughs in information and communication technologies.
"Going back to our roots": second generation biocomputing
Dec 16, 2005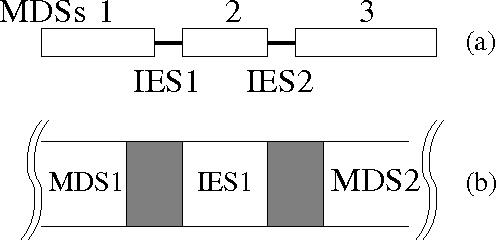
Researchers in the field of biocomputing have, for many years, successfully "harvested and exploited" the natural world for inspiration in developing systems that are robust, adaptable and capable of generating novel and even "creative" solutions to human-defined problems. However, in this position paper we argue that the time has now come for a reassessment of how we exploit biology to generate new computational systems. Previous solutions (the "first generation" of biocomputing techniques), whilst reasonably effective, are crude analogues of actual biological systems. We believe that a new, inherently inter-disciplinary approach is needed for the development of the emerging "second generation" of bio-inspired methods. This new modus operandi will require much closer interaction between the engineering and life sciences communities, as well as a bidirectional flow of concepts, applications and expertise. We support our argument by examining, in this new light, three existing areas of biocomputing (genetic programming, artificial immune systems and evolvable hardware), as well as an emerging area (natural genetic engineering) which may provide useful pointers as to the way forward.