 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStability and Geometry of Attractors in Neural Cellular Automata
Apr 14, 2026Throughout the literature on Neural Cellular Automata (NCAs), it is often taken for granted that the systems learn attractors. This is shown through evolving the system for many timesteps and noting visual similarity to the goal state. There remain many questions after such an analysis. Namely, what kind of attractors do we have? Is their behavior ordered or chaotic? Can we estimate stability over very long time horizons? What really happens in the attractor when perturbations are applied? In this paper, we present a case study to help answer these questions, with methods drawn from the literature on dynamical systems theory. We use the growing gecko NCA of Mordvintsev et al. (2020) with deterministic cell updates as a case study. To the best of the authors' knowledge, we present the first visualizations of NCA attractor dynamics. We also analyze them using the Lyapunov and Fourier spectra, to reveal that the NCA displays oscillatory, periodic and quasi-periodic behavior, and that these behaviors arise early during training. This challenges the belief that NCAs learn fixed point attractors. Finally, we show that large perturbations to the attractor states can throw the NCAs into a secondary mode separate from the original attractor. We hope that this initial foray into NCA attractor dynamics expands the toolkit for NCA researchers to analyze the robustness and stability of their systems.
Visualising the Attractor Landscape of Neural Cellular Automata
Apr 12, 2026As Neural Cellular Automata (NCAs) are increasingly applied outside of the toy models in Artificial Life, there is a pressing need to understand how they behave and to build appropriate routes to interpret what they have learnt. By their very nature, the benefits of training NCAs are balanced with a lack of interpretability: we can engineer emergent behaviour, but have limited ability to understand what has been learnt. In this paper, we apply a variety of techniques to pry open the NCA black box and glean some understanding of what it has learnt to do. We apply techniques from manifold learning (principal components analysis and both dense and sparse autoencoders) along with techniques from topological data analysis (persistent homology) to capture the NCA's underlying behavioural manifold, with varying success. Results show that when analysis is performed at a macroscopic level (i.e. taking the entire NCA state as a single data point), the underlying manifold is often quite simple and can be captured and analysed quite well. When analysis is performed at a microscopic level (i.e. taking the state of individual cells as a single data point), the manifold is highly complex and more complicated techniques are required in order to make sense of it.
Growing Reservoirs with Developmental Graph Cellular Automata
Aug 11, 2025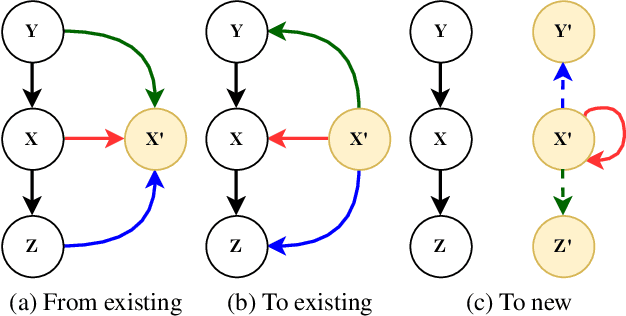
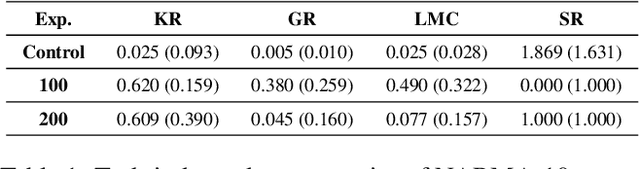
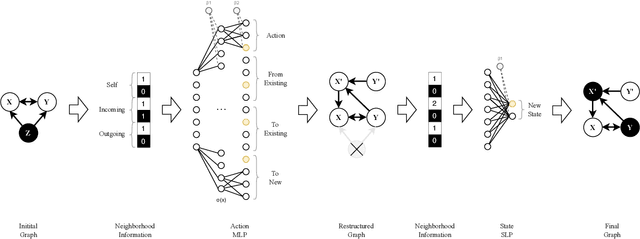
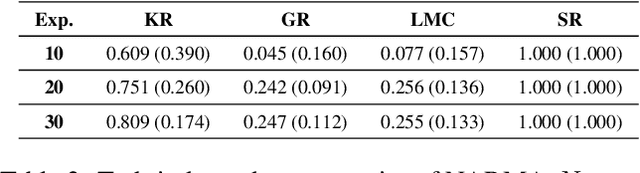
Developmental Graph Cellular Automata (DGCA) are a novel model for morphogenesis, capable of growing directed graphs from single-node seeds. In this paper, we show that DGCAs can be trained to grow reservoirs. Reservoirs are grown with two types of targets: task-driven (using the NARMA family of tasks) and task-independent (using reservoir metrics). Results show that DGCAs are able to grow into a variety of specialized, life-like structures capable of effectively solving benchmark tasks, statistically outperforming `typical' reservoirs on the same task. Overall, these lay the foundation for the development of DGCA systems that produce plastic reservoirs and for modeling functional, adaptive morphogenesis.
Identity Increases Stability in Neural Cellular Automata
Aug 08, 2025

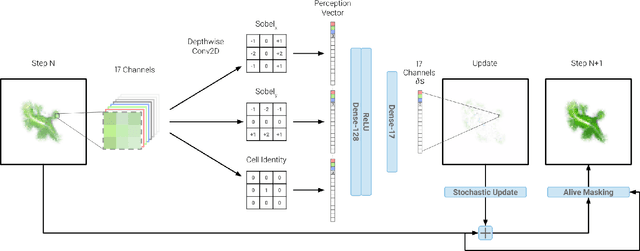
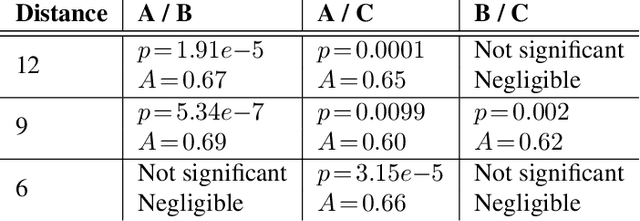
Neural Cellular Automata (NCAs) offer a way to study the growth of two-dimensional artificial organisms from a single seed cell. From the outset, NCA-grown organisms have had issues with stability, their natural boundary often breaking down and exhibiting tumour-like growth or failing to maintain the expected shape. In this paper, we present a method for improving the stability of NCA-grown organisms by introducing an 'identity' layer with simple constraints during training. Results show that NCAs grown in close proximity are more stable compared with the original NCA model. Moreover, only a single identity value is required to achieve this increase in stability. We observe emergent movement from the stable organisms, with increasing prevalence for models with multiple identity values. This work lays the foundation for further study of the interaction between NCA-grown organisms, paving the way for studying social interaction at a cellular level in artificial organisms.
Neural Cellular Automata Can Respond to Signals
May 22, 2023Neural Cellular Automata (NCAs) are a model of morphogenesis, capable of growing two-dimensional artificial organisms from a single seed cell. In this paper, we show that NCAs can be trained to respond to signals. Two types of signal are used: internal (genomically-coded) signals, and external (environmental) signals. Signals are presented to a single pixel for a single timestep. Results show NCAs are able to grow into multiple distinct forms based on internal signals, and are able to change colour based on external signals. Overall these contribute to the development of NCAs as a model of artificial morphogenesis, and pave the way for future developments embedding dynamic behaviour into the NCA model. Code and target images are available through GitHub: https://github.com/jstovold/ALIFE2023
Mixed-Initiative Procedural Content Generation using Level Design Patterns and Interactive Evolutionary Optimisation
May 15, 2020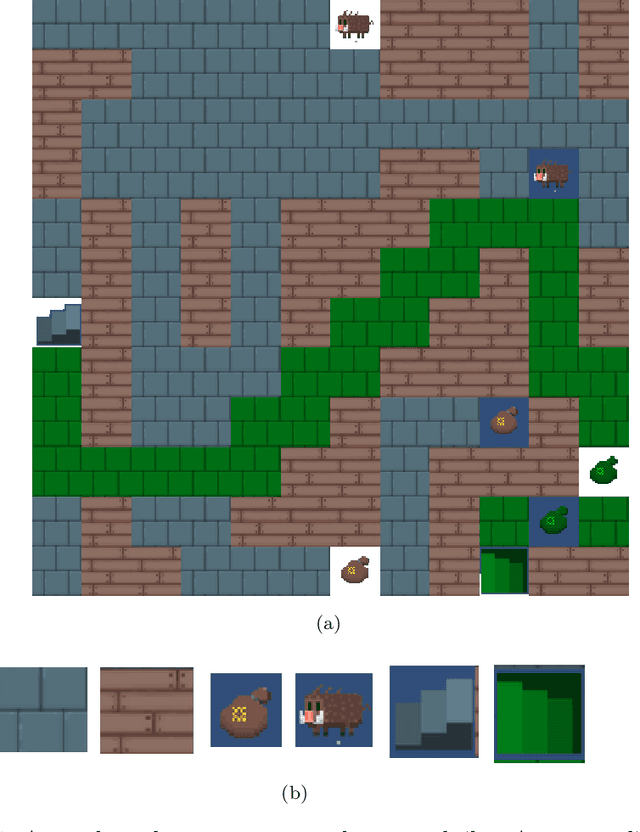
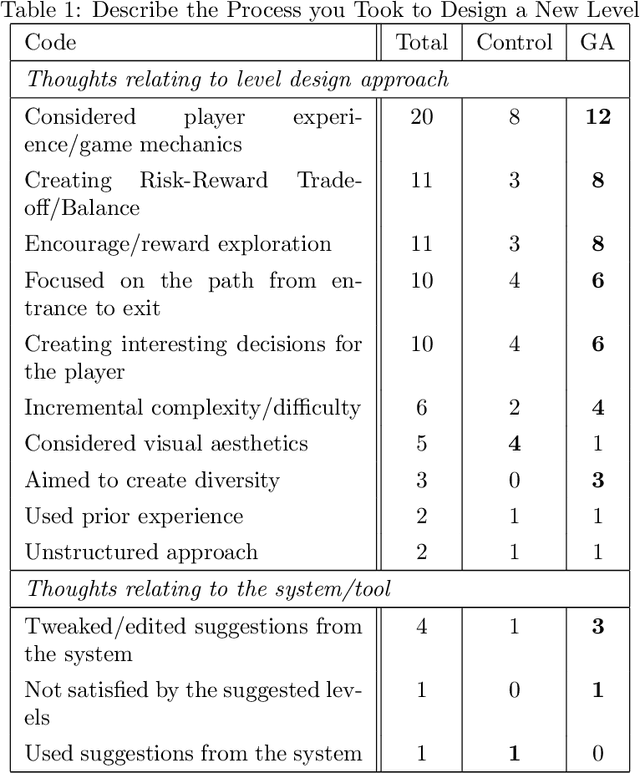
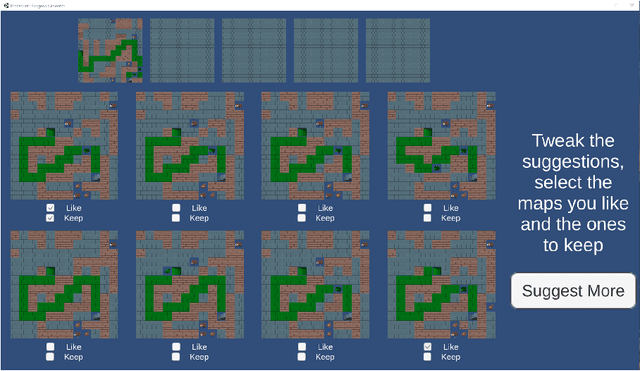
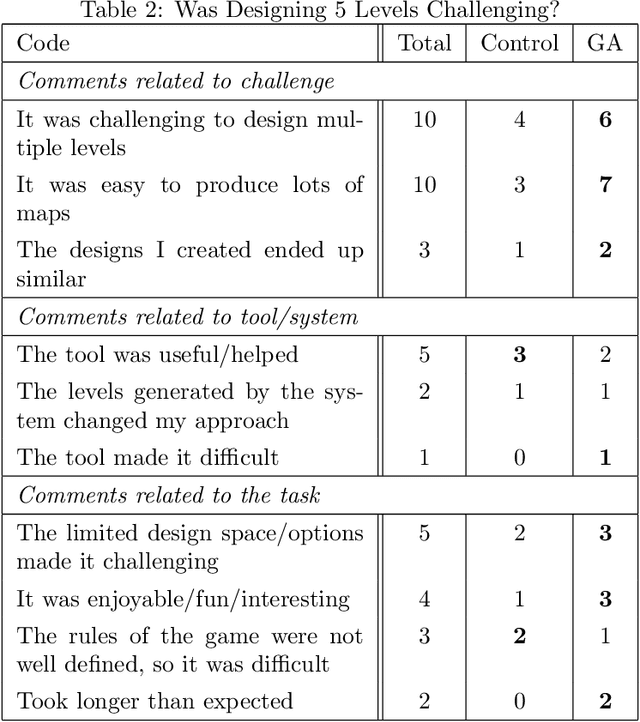
An approach for building mixed-initiative tools for the procedural generation of game levels using interactive evolutionary optimisation is introduced. A tool is created based on this approach which (a) is focused on supporting the designer to explore the design space and (b) only requires the designer to interact with it by designing levels. The tool identifies level design patterns in an initial hand-designed map and uses that information to drive an optimisation algorithm. This results in a number of suggestions which are presented to the designer, who can then edit them providing the system with valuable designer feedback. The effectiveness of this approach to create levels with similar level design patterns to a target is illustrated through a series of algorithm driven benchmark tests. To test the mixed-initiative aspect of the tool a triple-blind mixed-method, user study was conducted. When compared to a control group, provided with random level suggestions throughout the design process, the mixed-initiative approach increased engagement in the level design task and was effective in inspiring new ideas and design directions. This provides significant evidence that procedural content generation can be used as a powerful tool to support the human design process.
Cognitively-inspired homeostatic architecture can balance conflicting needs in robots
Nov 25, 2018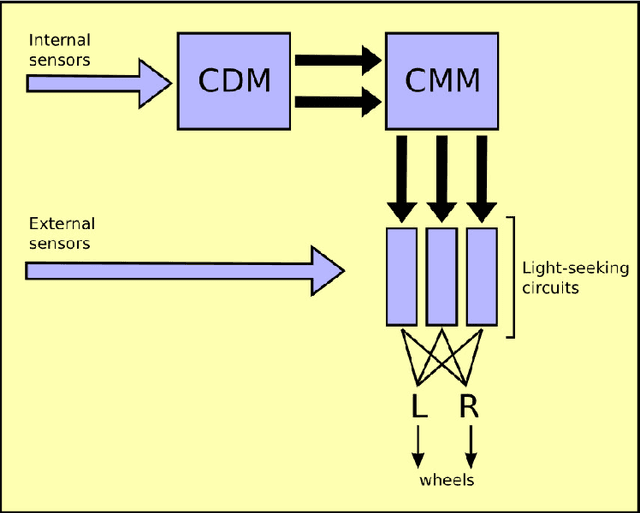

Autonomous robots require the ability to balance conflicting needs, such as whether to charge a battery rather than complete a task. Nature has evolved a mechanism for achieving this in the form of homeostasis. This paper presents CogSis, a cognition-inspired architecture for artificial homeostasis. CogSis provides a robot with the ability to balance conflicting needs so that it can maintain its internal state, while still completing its tasks. Through the use of an associative memory neural network, a robot running CogSis is able to learn about its environment rapidly by making associations between sensors. Results show that a Pi-Swarm robot running CogSis can balance charging its battery with completing a task, and can balance conflicting needs, such as charging its battery without overheating. The lab setup consists of a charging station and high-temperature region, demarcated with coloured lamps. The robot associates the colour of a lamp with the effect it has on the robot's internal environment (for example, charging the battery). The robot can then seek out that colour again when it runs low on charge. This work is the first control architecture that takes inspiration directly from distributed cognition. The result is an architecture that is able to learn and apply environmental knowledge rapidly, implementing homeostatic behaviour and balancing conflicting decisions.