 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn mesoscale thermal dynamics of para- and ortho- isomers of water
Jan 30, 2023This work describes experiments on thermal dynamics of pure H2O excited by hydrodynamic cavitation, which has been reported to facilitate the spin conversion of para- and ortho-isomers at water interfaces. Previous measurements by NMR and capillary methods of excited samples demonstrated changes of proton density by 12-15%, the surface tension up to 15.7%, which can be attributed to a non-equilibrium para-/ortho- ratio. Beside these changes, we also expect a variation of heat capacity. Experiments use a differential calorimetric approach with two devices: one with an active thermostat for diathermic measurements, another is fully passive for long-term measurements. Samples after excitation are degassed at -0.09MPa and thermally equalized in a water bath. Conducted attempts demonstrated changes in the heat capacity of experimental samples by 4.17%--5.72% measured in the transient dynamics within 60 min after excitation, which decreases to 2.08% in the steady-state dynamics 90-120 min after excitation. Additionally, we observed occurrence of thermal fluctuations at the level of 10^-3 C relative temperature on 20-40 min mesoscale dynamics and a long-term increase of such fluctuations in experimental samples. Obtained results are reproducible in both devices and are supported by previously published outcomes on four-photon scattering spectra in the range from -1.5 to 1.5 cm^-1 and electrochemical reactivity in CO2 and H2O2 pathways. Based on these results, we propose a hypothesis about ongoing spin conversion process on mesoscopic scales under weak influx of energy caused by thermal, EM or geomagnetic factors; this enables explaining electrochemical and thermal anomalies observed in long-term measurements.
Electric-field-coupled oscillators for collective electrochemical perception in underwater robotics
Mar 15, 2022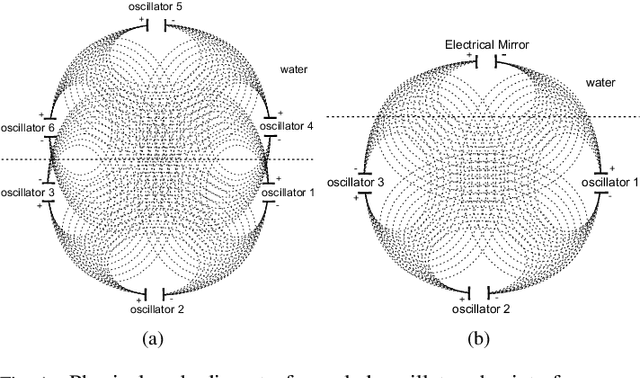
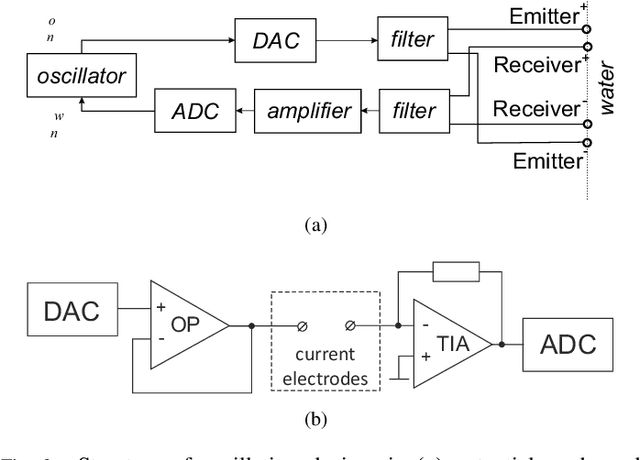
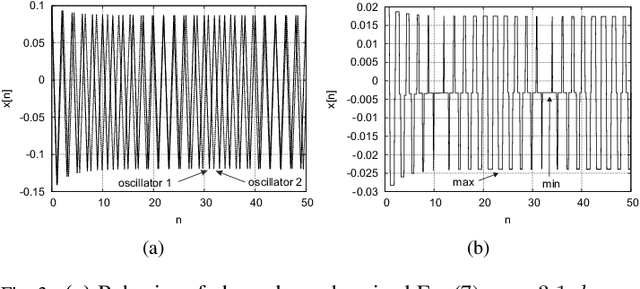
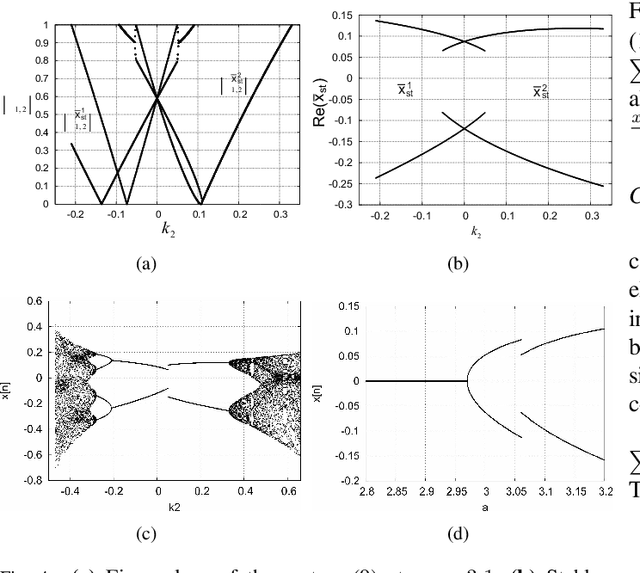
This work explores the application of nonlinear oscillators coupled by electric field in water for collective tasks in underwater robotics. Such coupled oscillators operate in clear and colloidal (mud, bottom silt) water and represent a collective electrochemical sensor that is sensitive to global environmental parameters, geometry of common electric field and spatial dynamics of autonomous underwater vehicles (AUVs). Implemented in hardware and software, this approach can be used to create global awareness in the group of robots, which possess limited sensing and communication capabilities. Using oscillators from different AUVs enables extending the range limitations related to electric dipole of a single AUV. Applications of this technique are demonstrated for detecting the number of AUVs, distances between them, perception of dielectric objects, synchronization of behavior and discrimination between 'collective self' and 'collective non-self' through an 'electrical mirror'. These approaches have been implemented in several research projects with AUVs in fresh and salt water.
The Biosensor based on electrochemical dynamics of fermentation in yeast Saccharomyces Cerevisiae
Feb 07, 2022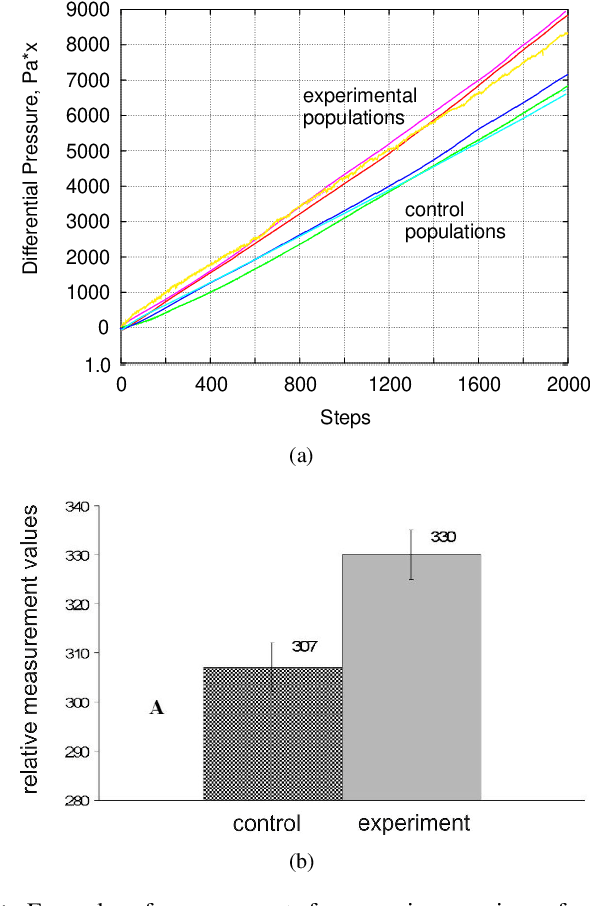
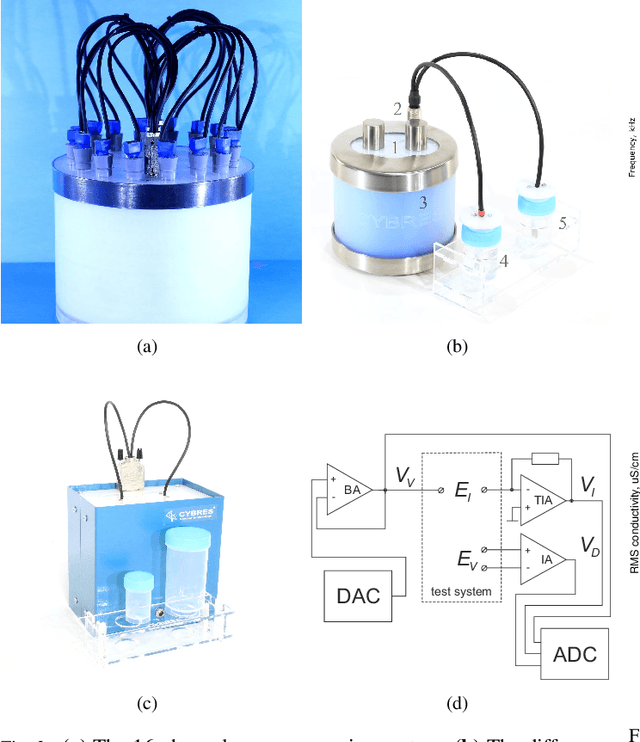
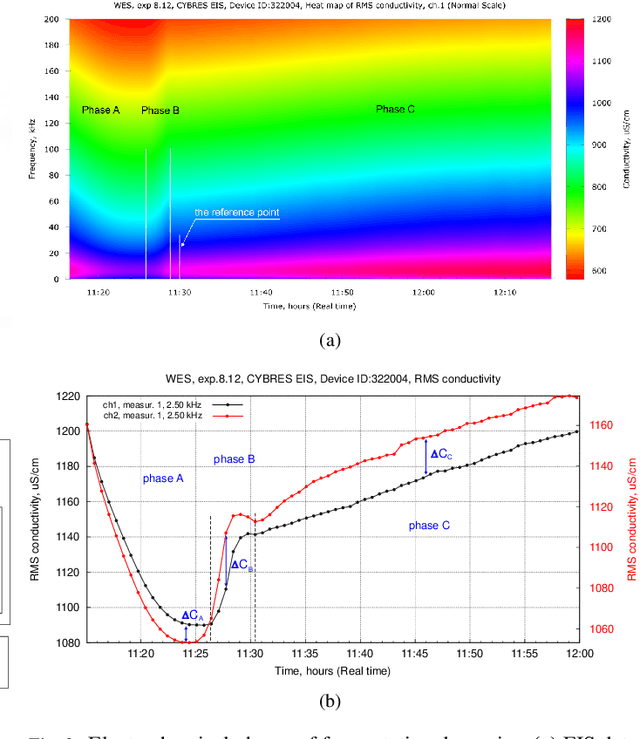
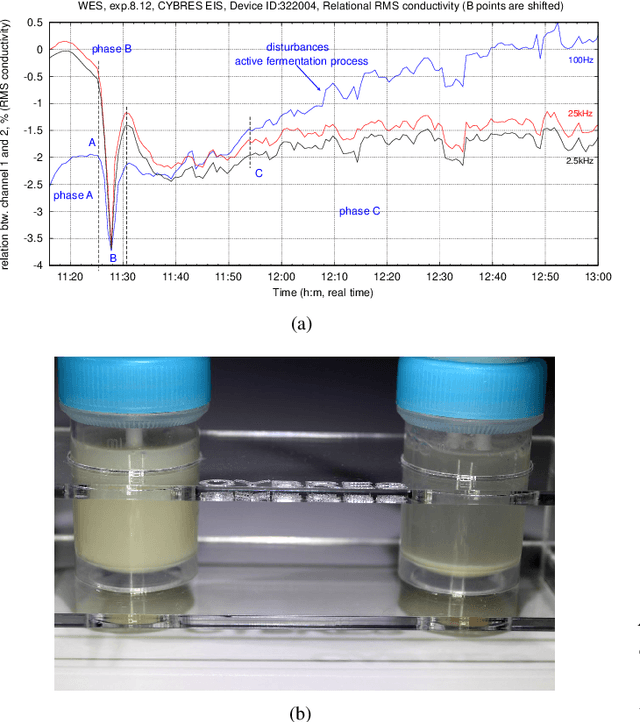
The zymase activity of the yeast Saccharomyces Cerevisiae is sensitive to environmental parameters and is therefore used as a microbiological sensor for water quality assessment, ecotoxicological characterization or environmental monitoring. Comparing to bacterial bioluminescence approach, this method has no toxicity, excludes usage of genetically modified microorganisms, and enables low-cost express analysis. This work focuses on measuring the yeast fermentation dynamics based on multichannel pressure sensing and electrochemical impedance spectroscopy (EIS). Measurement results are compared with each other in terms of accuracy, reproducibility and ease of use in the field conditions. It has been shown that EIS provides more information about ionic dynamics of metabolic processes and requires less complex measurements. The conducted experiments demonstrated the sensitivity of this approach for assessing biophotonic phenomena, non-chemical water treatments and impact of environmental stressors.
Flora robotica -- An Architectural System Combining Living Natural Plants and Distributed Robots
Sep 13, 2017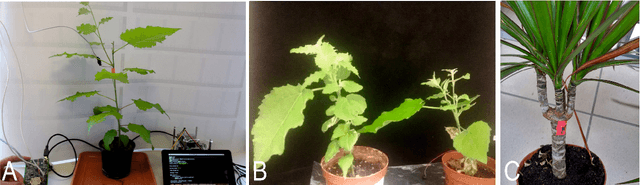

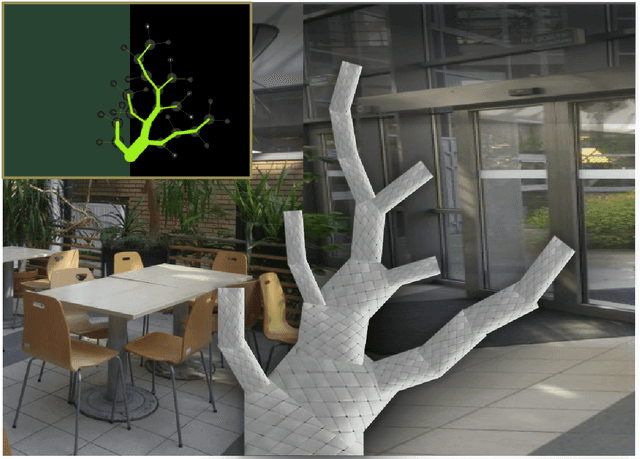
Key to our project flora robotica is the idea of creating a bio-hybrid system of tightly coupled natural plants and distributed robots to grow architectural artifacts and spaces. Our motivation with this ground research project is to lay a principled foundation towards the design and implementation of living architectural systems that provide functionalities beyond those of orthodox building practice, such as self-repair, material accumulation and self-organization. Plants and robots work together to create a living organism that is inhabited by human beings. User-defined design objectives help to steer the directional growth of the plants, but also the system's interactions with its inhabitants determine locations where growth is prohibited or desired (e.g., partitions, windows, occupiable space). We report our plant species selection process and aspects of living architecture. A leitmotif of our project is the rich concept of braiding: braids are produced by robots from continuous material and serve as both scaffolds and initial architectural artifacts before plants take over and grow the desired architecture. We use light and hormones as attraction stimuli and far-red light as repelling stimulus to influence the plants. Applied sensors range from simple proximity sensing to detect the presence of plants to sophisticated sensing technology, such as electrophysiology and measurements of sap flow. We conclude by discussing our anticipated final demonstrator that integrates key features of flora robotica, such as the continuous growth process of architectural artifacts and self-repair of living architecture.
Awareness and Self-Awareness for Multi-Robot Organisms
Nov 22, 2011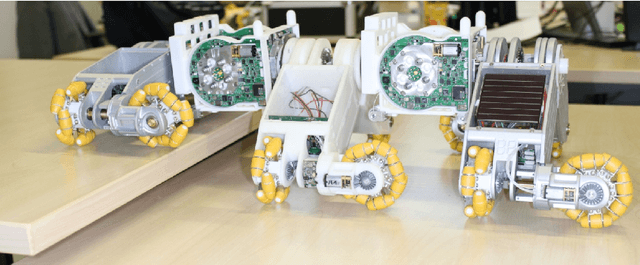
Awareness and self-awareness are two different notions related to knowing the environment and itself. In a general context, the mechanism of self-awareness belongs to a class of co-called "self-issues" (self-* or self-star): self-adaptation, self-repairing, self-replication, self-development or self-recovery. The self-* issues are connected in many ways to adaptability and evolvability, to the emergence of behavior and to the controllability of long-term developmental processes. Self-* are either natural properties of several systems, such as self-assembling of molecular networks, or may emerge as a result of homeostatic regulation. Different computational processes, leading to a global optimization, increasing scalability and reliability of collective systems, create such a homeostatic regulation. Moreover, conditions of ecological survival, imposed on such systems, lead to a discrimination between "self" and "non-self" as well as to the emergence of different self-phenomena. There are many profound challenges, such as understanding these mechanisms, or long-term predictability, which have a considerable impact on research in the area of artificial intelligence and intelligent systems.
Robot Companions: Technology for Humans
Nov 22, 2011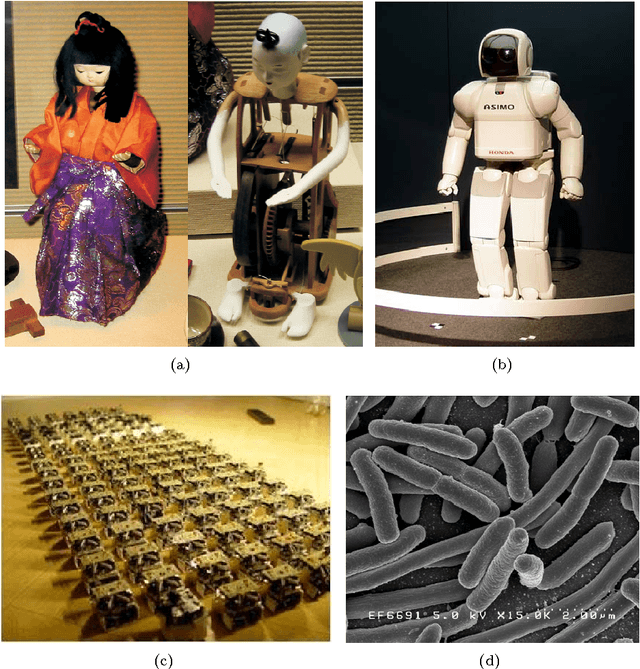
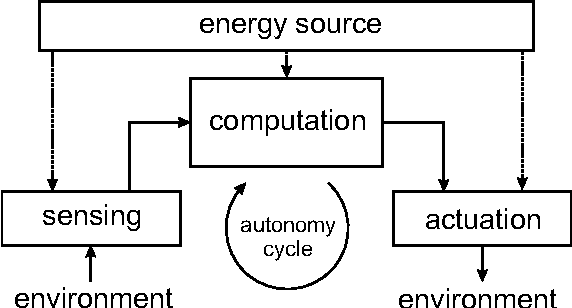
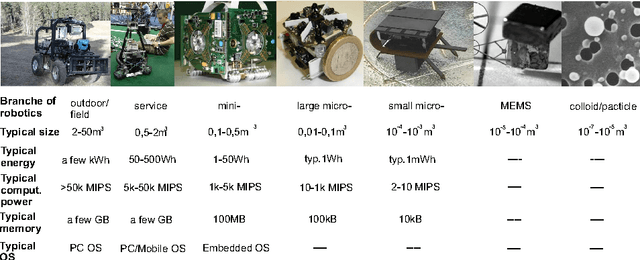
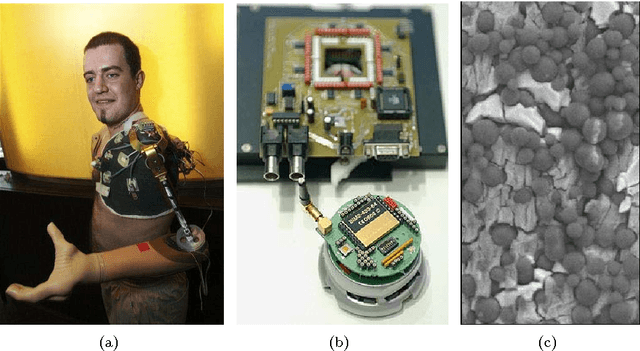
Creation of devices and mechanisms which help people has a long history. Their inventors always targeted practical goals such as irrigation, harvesting, devices for construction sites, measurement, and, last but not least, military tasks for different mechanical and later mechatronic systems. Development of such assisting mechanisms counts back to Greek engineering, came through Middle Ages and led finally in XIX and XX centuries to autonomous devices, which we call today "Robots". This chapter provides overview of several robotic technologies, introduces bio-/chemo- hybrid and collective systems and discuss their applications in service areas.
On Three Challenges of Artificial Living Systems and Embodied Evolution
Nov 04, 2011Creating autonomous, self-supporting, self-replicating, sustainable systems is a great challenge. To some extent, understanding life means not only being able to create it from scratch, but also improving, supporting, saving it, or even making it even more advanced. This can be thought of as a long-term goal of living technologies and embodied evolution. Current research agenda targets several short- and middle-term steps towards achieving such a vision: connection of ICT and bio-/chemo- developments, advances in "soft" and "wet" robotics, integration of material science into developmental robotics, and potentially, addressing the self-replication in autonomous systems.
Collective Energy Foraging of Robot Swarms and Robot Organisms
Nov 03, 2011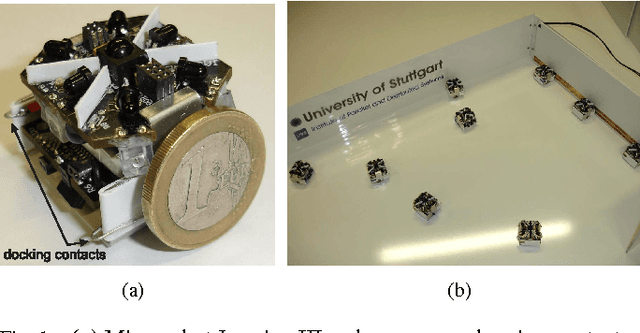
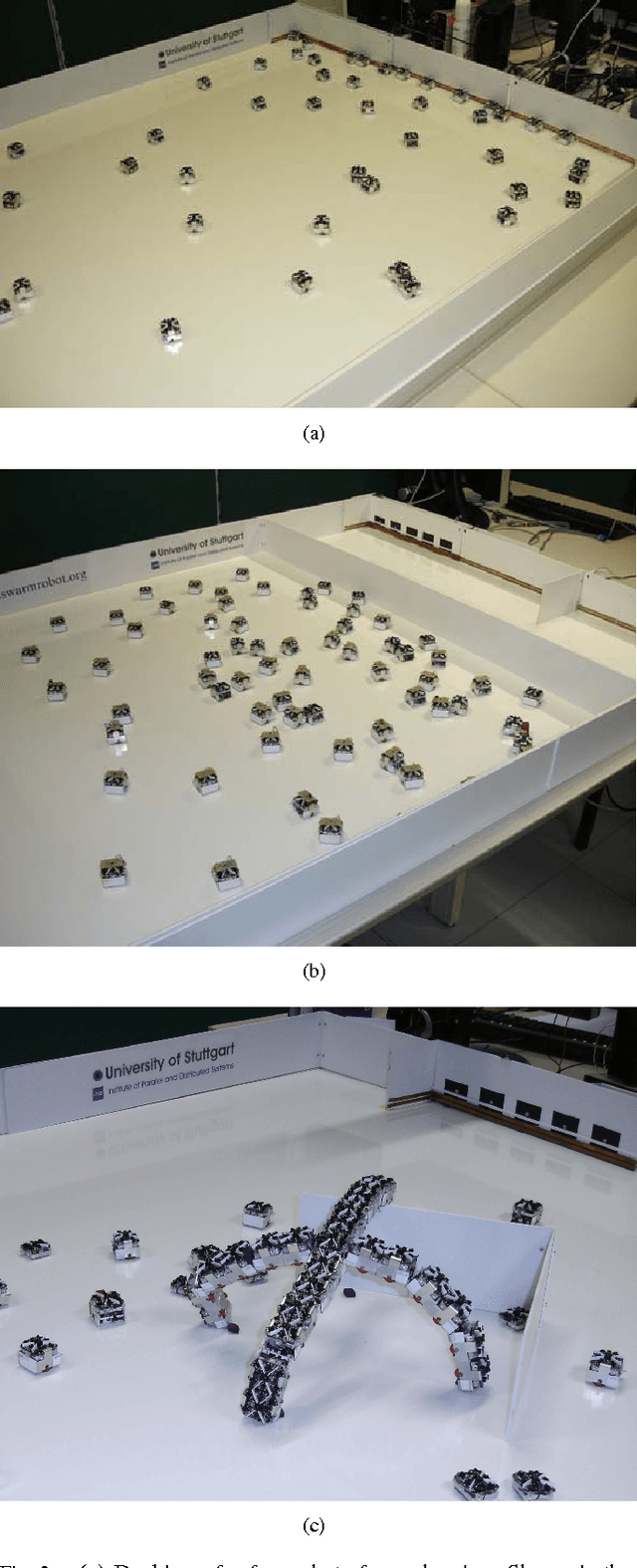
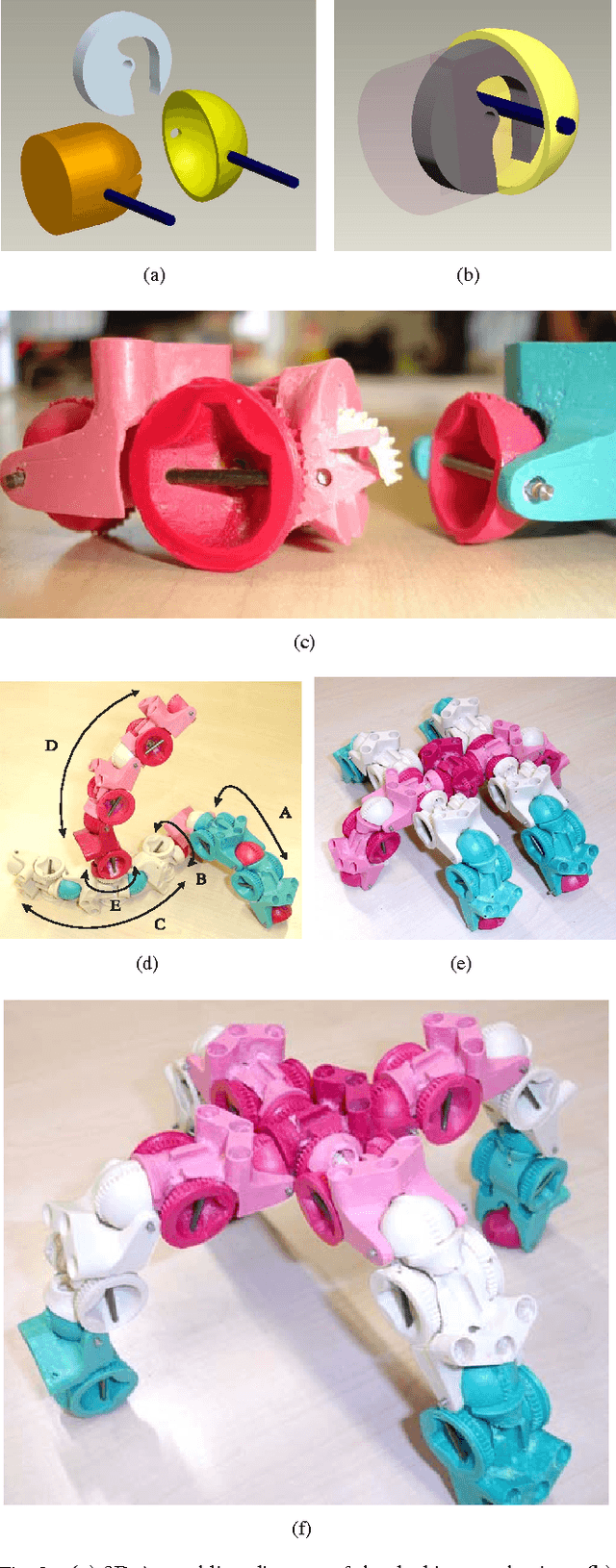
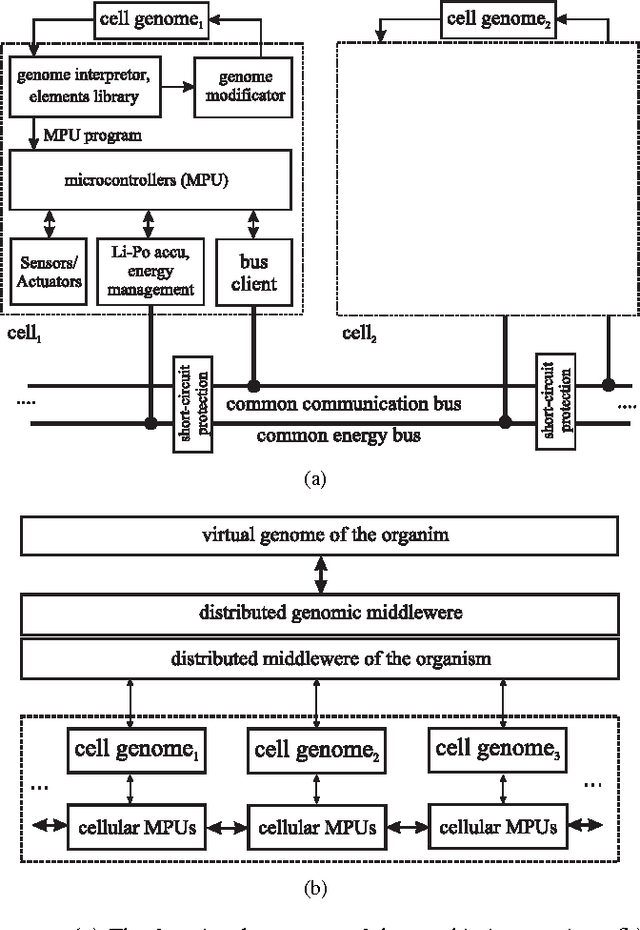
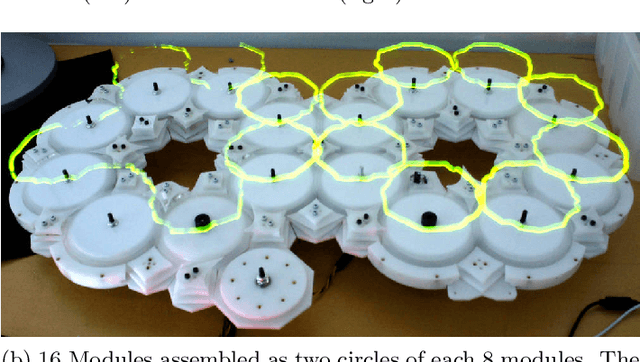
Cooperation and competition among stand-alone swarm agents increase collective fitness of the whole system. A principally new kind of collective systems is demonstrated by some bacteria and fungi, when they build symbiotic organisms. Symbiotic life forms emerge new functional and self-developmental capabilities, which allow better survival of swarm agents in different environments. In this paper we consider energy foraging scenario for two robotic species, swarm robots and symbiotic robot organism. It is indicated that aggregation of microrobots into a robot organism can provide better functional fitness for the whole group. A prototype of microrobots capable of autonomous aggregation and disaggregation are shown.
Development of a Cost-efficient Autonomous MAV for an Unstructured Indoor Environment
Nov 02, 2011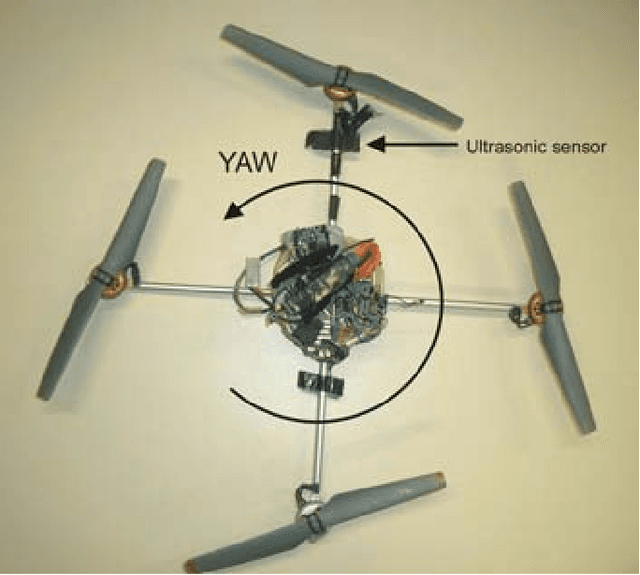
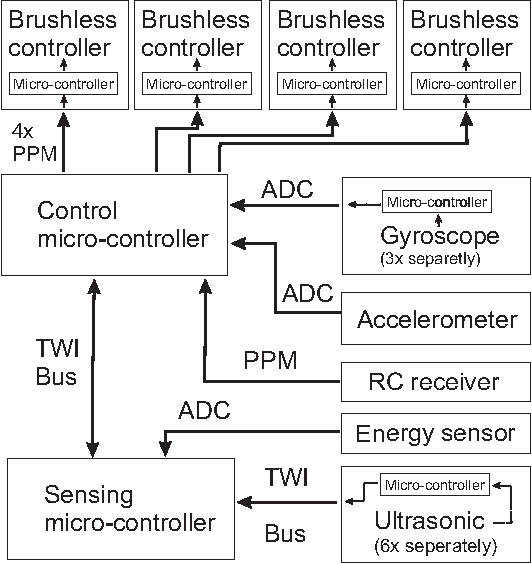
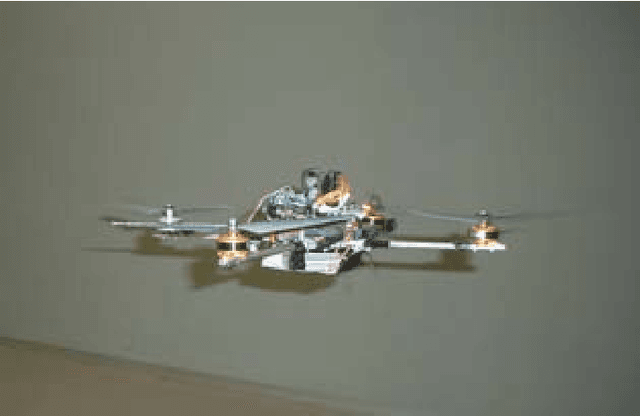
Performing rescuing and surveillance operations with autonomous ground and aerial vehicles become more and more apparent task. Involving unmanned robot systems allows making these operations more efficient, safe and reliable especially in hazardous areas. This work is devoted to the development of a cost-efficient micro aerial vehicle in a quadrocopter shape for developmental purposes within indoor scenarios. It has been constructed with off-the-shelf components available for mini helicopters. Additional sensors and electronics are incorporated into this aerial vehicle to stabilize its flight behavior and to provide a capability of an autonomous navigation in a partially unstructured indoor environment.
Swarmrobot.org - Open-hardware Microrobotic Project for Large-scale Artificial Swarms
Oct 26, 2011
The purpose of this paper is to give an overview of the open-hardware microrobotic project swarmrobot.org and the platform Jasmine for building large-scale artificial swarms. The project targets an open development of cost-effective hardware and software for a quick implementation of swarm behavior with real robots. Detailed instructions for making the robot, open-source simulator, software libraries and multiple publications about performed experiments are ready for download and intend to facilitate exploration of collective and emergent phenomena, guided self-organization and swarm robotics in experimental way.