Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollective Energy Foraging of Robot Swarms and Robot Organisms
Paper and Code
Nov 03, 2011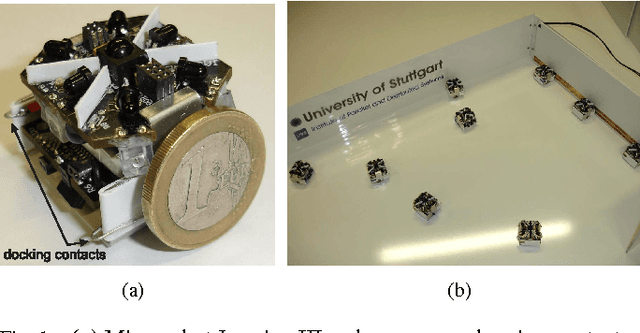
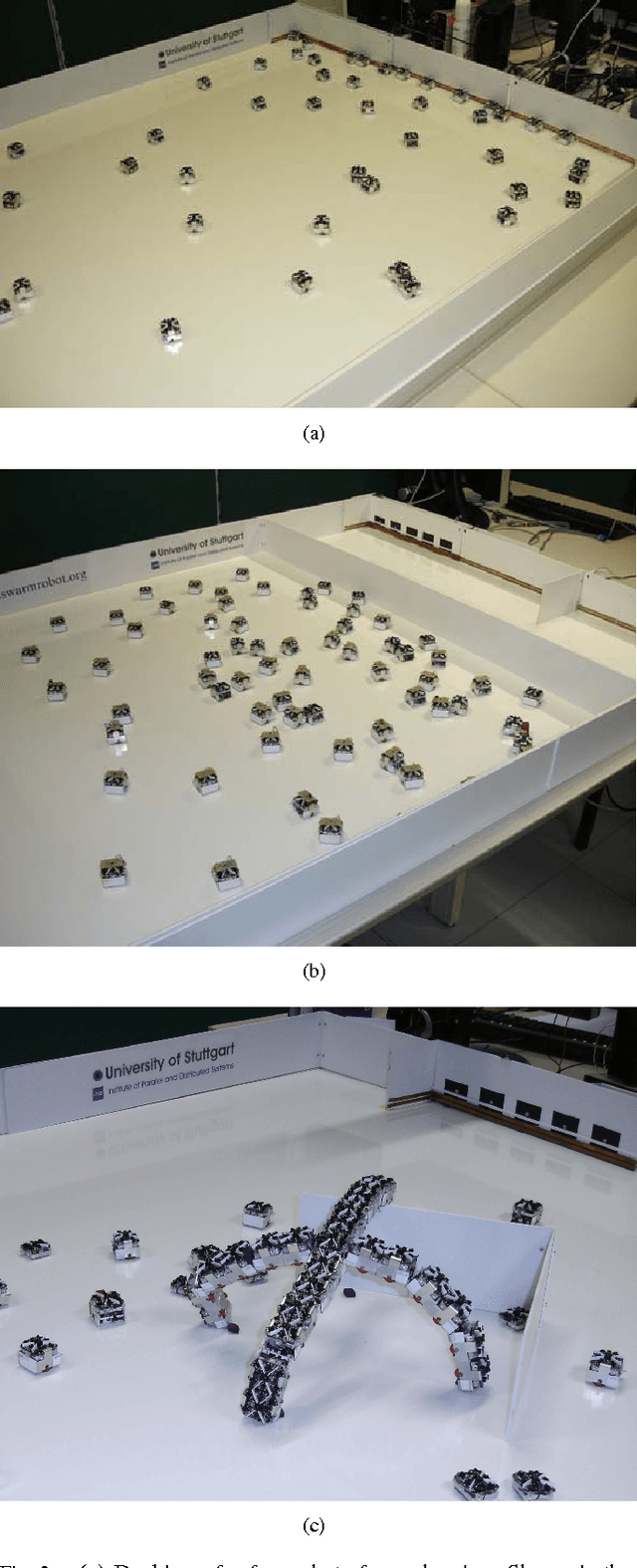
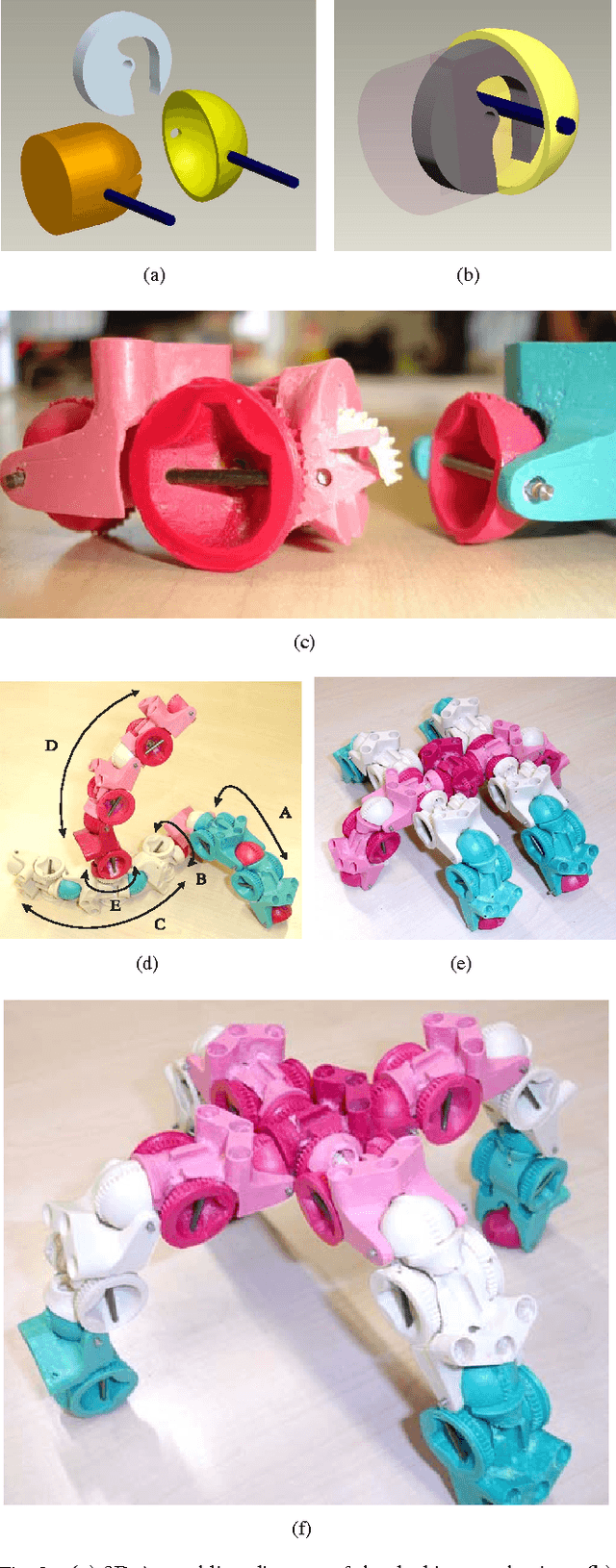
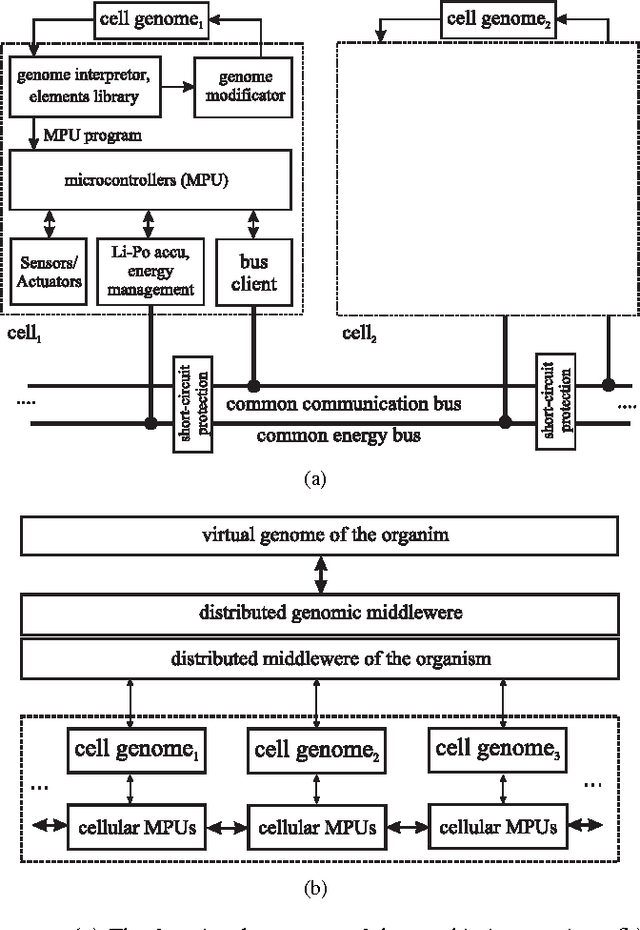
Cooperation and competition among stand-alone swarm agents increase collective fitness of the whole system. A principally new kind of collective systems is demonstrated by some bacteria and fungi, when they build symbiotic organisms. Symbiotic life forms emerge new functional and self-developmental capabilities, which allow better survival of swarm agents in different environments. In this paper we consider energy foraging scenario for two robotic species, swarm robots and symbiotic robot organism. It is indicated that aggregation of microrobots into a robot organism can provide better functional fitness for the whole group. A prototype of microrobots capable of autonomous aggregation and disaggregation are shown.
View paper on