 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBellman: A Toolbox for Model-Based Reinforcement Learning in TensorFlow
Apr 13, 2021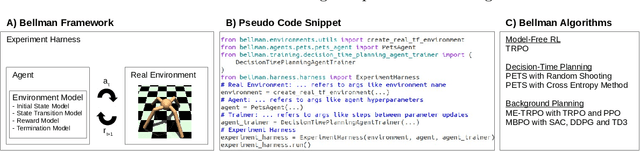
In the past decade, model-free reinforcement learning (RL) has provided solutions to challenging domains such as robotics. Model-based RL shows the prospect of being more sample-efficient than model-free methods in terms of agent-environment interactions, because the model enables to extrapolate to unseen situations. In the more recent past, model-based methods have shown superior results compared to model-free methods in some challenging domains with non-linear state transitions. At the same time, it has become apparent that RL is not market-ready yet and that many real-world applications are going to require model-based approaches, because model-free methods are too sample-inefficient and show poor performance in early stages of training. The latter is particularly important in industry, e.g. in production systems that directly impact a company's revenue. This demonstrates the necessity for a toolbox to push the boundaries for model-based RL. While there is a plethora of toolboxes for model-free RL, model-based RL has received little attention in terms of toolbox development. Bellman aims to fill this gap and introduces the first thoroughly designed and tested model-based RL toolbox using state-of-the-art software engineering practices. Our modular approach enables to combine a wide range of environment models with generic model-based agent classes that recover state-of-the-art algorithms. We also provide an experiment harness to compare both model-free and model-based agents in a systematic fashion w.r.t. user-defined evaluation metrics (e.g. cumulative reward). This paves the way for new research directions, e.g. investigating uncertainty-aware environment models that are not necessarily neural-network-based, or developing algorithms to solve industrially-motivated benchmarks that share characteristics with real-world problems.
GPflux: A Library for Deep Gaussian Processes
Apr 12, 2021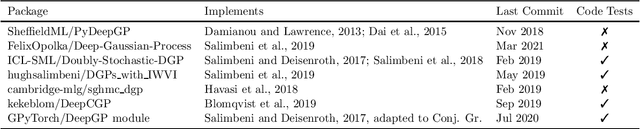
We introduce GPflux, a Python library for Bayesian deep learning with a strong emphasis on deep Gaussian processes (DGPs). Implementing DGPs is a challenging endeavour due to the various mathematical subtleties that arise when dealing with multivariate Gaussian distributions and the complex bookkeeping of indices. To date, there are no actively maintained, open-sourced and extendable libraries available that support research activities in this area. GPflux aims to fill this gap by providing a library with state-of-the-art DGP algorithms, as well as building blocks for implementing novel Bayesian and GP-based hierarchical models and inference schemes. GPflux is compatible with and built on top of the Keras deep learning eco-system. This enables practitioners to leverage tools from the deep learning community for building and training customised Bayesian models, and create hierarchical models that consist of Bayesian and standard neural network layers in a single coherent framework. GPflux relies on GPflow for most of its GP objects and operations, which makes it an efficient, modular and extensible library, while having a lean codebase.