 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling Epistemic Uncertainty in Social Perception via Rashomon Set Agents
Mar 21, 2026We present an LLM-driven multi-agent probabilistic modeling framework that demonstrates how differences in students' subjective social perceptions arise and evolve in real-world classroom settings, under constraints from an observed social network and limited questionnaire data. When social information is incomplete and the accuracy of perception differs between students, they can form different views of the same group structure from local cues they can access. Repeated peer communication and belief updates can gradually change these views and, over time, lead to stable group-level differences. To avoid assuming a global "god's-eye view," we assign each student an individualized subjective graph that shows which social ties they can perceive and how far information is reachable from their perspective. All judgments and interactions are restricted to this subjective graph: agents use retrieval-augmented generation (RAG) to access only local information and then form evaluations of peers' competence and social standing. We also add structural perturbations related to social-anxiety to represent consistent individual differences in the accuracy of social perception. During peer exchanges, agents share narrative assessments of classmates' academic performance and social position with uncertainty tags, and update beliefs probabilistically using LLM-based trust scores. Using the time series of six real exam scores as an exogenous reference, we run multi-step simulations to examine how epistemic uncertainty spreads through local interactions. Experiments show that, without relying on global information, the framework reproduces several collective dynamics consistent with real-world educational settings. The code is released at https://anonymous.4open.science/r/Rashomonomon-0126.
Efficient and Safe Planner for Automated Driving on Ramps Considering Unsatisfication
Apr 20, 2025Automated driving on ramps presents significant challenges due to the need to balance both safety and efficiency during lane changes. This paper proposes an integrated planner for automated vehicles (AVs) on ramps, utilizing an unsatisfactory level metric for efficiency and arrow-cluster-based sampling for safety. The planner identifies optimal times for the AV to change lanes, taking into account the vehicle's velocity as a key factor in efficiency. Additionally, the integrated planner employs arrow-cluster-based sampling to evaluate collision risks and select an optimal lane-changing curve. Extensive simulations were conducted in a ramp scenario to verify the planner's efficient and safe performance. The results demonstrate that the proposed planner can effectively select an appropriate lane-changing time point and a safe lane-changing curve for AVs, without incurring any collisions during the maneuver.
TrajGEOS: Trajectory Graph Enhanced Orientation-based Sequential Network for Mobility Prediction
Dec 26, 2024Human mobility studies how people move to access their needed resources and plays a significant role in urban planning and location-based services. As a paramount task of human mobility modeling, next location prediction is challenging because of the diversity of users' historical trajectories that gives rise to complex mobility patterns and various contexts. Deep sequential models have been widely used to predict the next location by leveraging the inherent sequentiality of trajectory data. However, they do not fully leverage the relationship between locations and fail to capture users' multi-level preferences. This work constructs a trajectory graph from users' historical traces and proposes a \textbf{Traj}ectory \textbf{G}raph \textbf{E}nhanced \textbf{O}rientation-based \textbf{S}equential network (TrajGEOS) for next-location prediction tasks. TrajGEOS introduces hierarchical graph convolution to capture location and user embeddings. Such embeddings consider not only the contextual feature of locations but also the relation between them, and serve as additional features in downstream modules. In addition, we design an orientation-based module to learn users' mid-term preferences from sequential modeling modules and their recent trajectories. Extensive experiments on three real-world LBSN datasets corroborate the value of graph and orientation-based modules and demonstrate that TrajGEOS outperforms the state-of-the-art methods on the next location prediction task.
Modeling Orders of User Behaviors via Differentiable Sorting: A Multi-task Framework to Predicting User Post-click Conversion
Jul 18, 2023User post-click conversion prediction is of high interest to researchers and developers. Recent studies employ multi-task learning to tackle the selection bias and data sparsity problem, two severe challenges in post-click behavior prediction, by incorporating click data. However, prior works mainly focused on pointwise learning and the orders of labels (i.e., click and post-click) are not well explored, which naturally poses a listwise learning problem. Inspired by recent advances on differentiable sorting, in this paper, we propose a novel multi-task framework that leverages orders of user behaviors to predict user post-click conversion in an end-to-end approach. Specifically, we define an aggregation operator to combine predicted outputs of different tasks to a unified score, then we use the computed scores to model the label relations via differentiable sorting. Extensive experiments on public and industrial datasets show the superiority of our proposed model against competitive baselines.
A Nonconvex Low-Rank Tensor Completion Model for Spatiotemporal Traffic Data Imputation
Mar 23, 2020

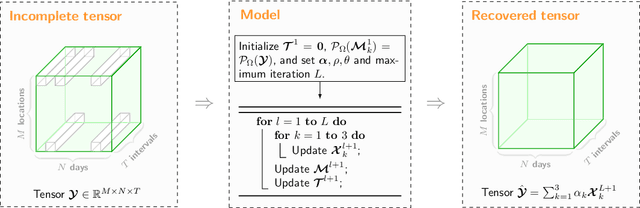

Sparsity and missing data problems are very common in spatiotemporal traffic data collected from various sensing systems. Making accurate imputation is critical to many applications in intelligent transportation systems. In this paper, we formulate the missing data imputation problem in spatiotemporal traffic data in a low-rank tensor completion (LRTC) framework and define a novel truncated nuclear norm (TNN) on traffic tensors of location$\times$day$\times$time of day. In particular, we introduce an universal rate parameter to control the degree of truncation on all tensor modes in the proposed LRTC-TNN model, and this allows us to better characterize the hidden patterns in spatiotemporal traffic data. Based on the framework of the Alternating Direction Method of Multipliers (ADMM), we present an efficient algorithm to obtain the optimal solution for each variable. We conduct numerical experiments on four spatiotemporal traffic data sets, and our results show that the proposed LRTC-TNN model outperforms many state-of-the-art imputation models with missing rates/patterns. Moreover, the proposed model also outperforms other baseline models in extreme missing scenarios.