 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn End-to-end Flight Control Network for High-speed UAV Obstacle Avoidance based on Event-Depth Fusion
Mar 28, 2026Achieving safe, high-speed autonomous flight in complex environments with static, dynamic, or mixed obstacles remains challenging, as a single perception modality is incomplete. Depth cameras are effective for static objects but suffer from motion blur at high speeds. Conversely, event cameras excel at capturing rapid motion but struggle to perceive static scenes. To exploit the complementary strengths of both sensors, we propose an end-to-end flight control network that achieves feature-level fusion of depth images and event data through a bidirectional crossattention module. The end-to-end network is trained via imitation learning, which relies on high-quality supervision. Building on this insight, we design an efficient expert planner using Spherical Principal Search (SPS). This planner reduces computational complexity from $O(n^2)$ to $O(n)$ while generating smoother trajectories, achieving over 80% success rate at 17m/s--nearly 20% higher than traditional planners. Simulation experiments show that our method attains a 70-80% success rate at 17 m/s across varied scenes, surpassing single-modality and unidirectional fusion models by 10-20%. These results demonstrate that bidirectional fusion effectively integrates event and depth information, enabling more reliable obstacle avoidance in complex environments with both static and dynamic objects.
Embodied Neuromorphic Control Applied on a 7-DOF Robotic Manipulator
Apr 17, 2025



The development of artificial intelligence towards real-time interaction with the environment is a key aspect of embodied intelligence and robotics. Inverse dynamics is a fundamental robotics problem, which maps from joint space to torque space of robotic systems. Traditional methods for solving it rely on direct physical modeling of robots which is difficult or even impossible due to nonlinearity and external disturbance. Recently, data-based model-learning algorithms are adopted to address this issue. However, they often require manual parameter tuning and high computational costs. Neuromorphic computing is inherently suitable to process spatiotemporal features in robot motion control at extremely low costs. However, current research is still in its infancy: existing works control only low-degree-of-freedom systems and lack performance quantification and comparison. In this paper, we propose a neuromorphic control framework to control 7 degree-of-freedom robotic manipulators. We use Spiking Neural Network to leverage the spatiotemporal continuity of the motion data to improve control accuracy, and eliminate manual parameters tuning. We validated the algorithm on two robotic platforms, which reduces torque prediction error by at least 60% and performs a target position tracking task successfully. This work advances embodied neuromorphic control by one step forward from proof of concept to applications in complex real-world tasks.
Towards hardware Implementation of WTA for CPG-based control of a Spiking Robotic Arm
Feb 14, 2022



Biological nervous systems typically perform the control of numerous degrees of freedom for example in animal limbs. Neuromorphic engineers study these systems by emulating them in hardware for a deeper understanding and its possible application to solve complex problems in engineering and robotics. Central-Pattern-Generators (CPGs) are part of neuro-controllers, typically used at their last steps to produce rhythmic patterns for limbs movement. Different patterns and gaits typically compete through winner-take-all (WTA) circuits to produce the right movements. In this work we present a WTA circuit implemented in a Spiking-Neural-Network (SNN) processor to produce such patterns for controlling a robotic arm in real-time. The robot uses spike-based proportional-integrativederivative (SPID) controllers to keep a commanded joint position from the winner population of neurons of the WTA circuit. Experiments demonstrate the feasibility of robotic control with spiking circuits following brain-inspiration.
Closed-loop spiking control on a neuromorphic processor implemented on the iCub
Sep 01, 2020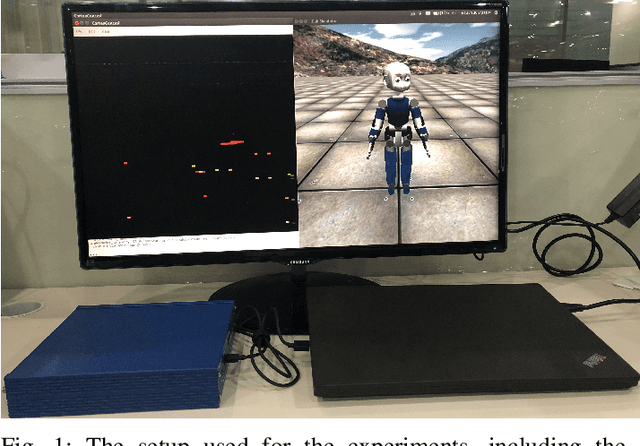
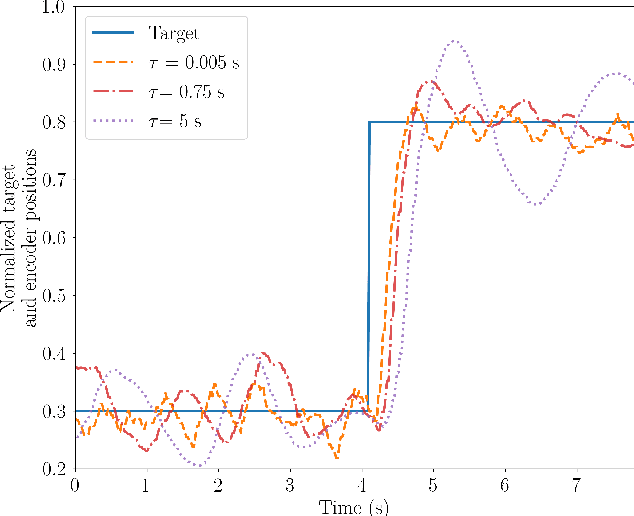
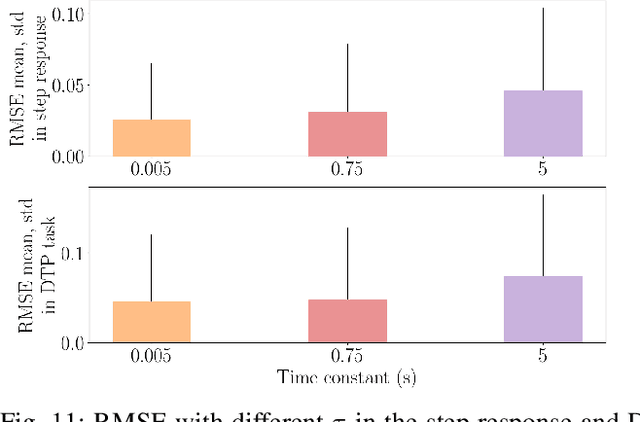
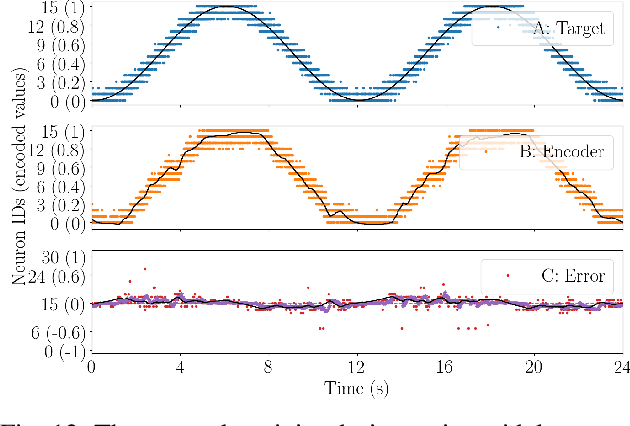
Despite neuromorphic engineering promises the deployment of low latency, adaptive and low power systems that can lead to the design of truly autonomous artificial agents, the development of a fully neuromorphic artificial agent is still missing. While neuromorphic sensing and perception, as well as decision-making systems, are now mature, the control and actuation part is lagging behind. In this paper, we present a closed-loop motor controller implemented on mixed-signal analog-digital neuromorphic hardware using a spiking neural network. The network performs a proportional control action by encoding target, feedback, and error signals using a spiking relational network. It continuously calculates the error through a connectivity pattern, which relates the three variables by means of feed-forward connections. Recurrent connections within each population are used to speed up the convergence, decrease the effect of mismatch and improve selectivity. The neuromorphic motor controller is interfaced with the iCub robot simulator. We tested our spiking P controller in a single joint control task, specifically for the robot head yaw. The spiking controller sends the target positions, reads the motor state from its encoder, and sends back the motor commands to the joint. The performance of the spiking controller is tested in a step response experiment and in a target pursuit task. In this work, we optimize the network structure to make it more robust to noisy inputs and device mismatch, which leads to better control performances.