 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards hardware Implementation of WTA for CPG-based control of a Spiking Robotic Arm
Feb 14, 2022



Biological nervous systems typically perform the control of numerous degrees of freedom for example in animal limbs. Neuromorphic engineers study these systems by emulating them in hardware for a deeper understanding and its possible application to solve complex problems in engineering and robotics. Central-Pattern-Generators (CPGs) are part of neuro-controllers, typically used at their last steps to produce rhythmic patterns for limbs movement. Different patterns and gaits typically compete through winner-take-all (WTA) circuits to produce the right movements. In this work we present a WTA circuit implemented in a Spiking-Neural-Network (SNN) processor to produce such patterns for controlling a robotic arm in real-time. The robot uses spike-based proportional-integrativederivative (SPID) controllers to keep a commanded joint position from the winner population of neurons of the WTA circuit. Experiments demonstrate the feasibility of robotic control with spiking circuits following brain-inspiration.
Hardware calibrated learning to compensate heterogeneity in analog RRAM-based Spiking Neural Networks
Feb 10, 2022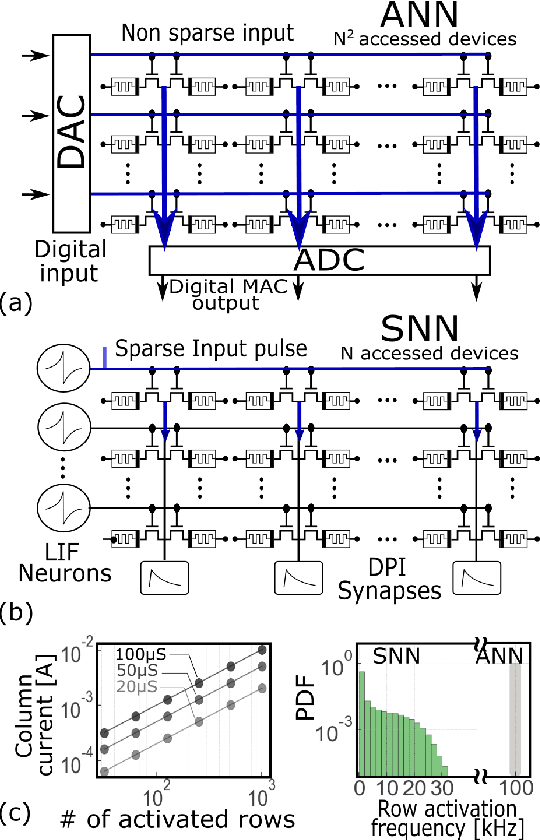
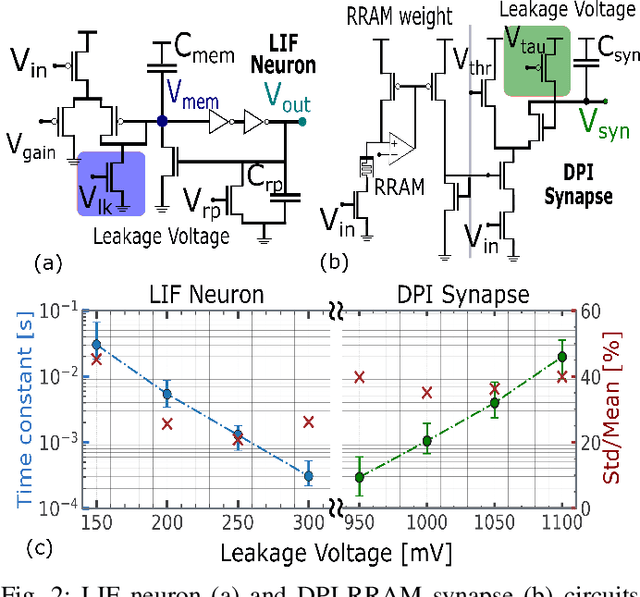
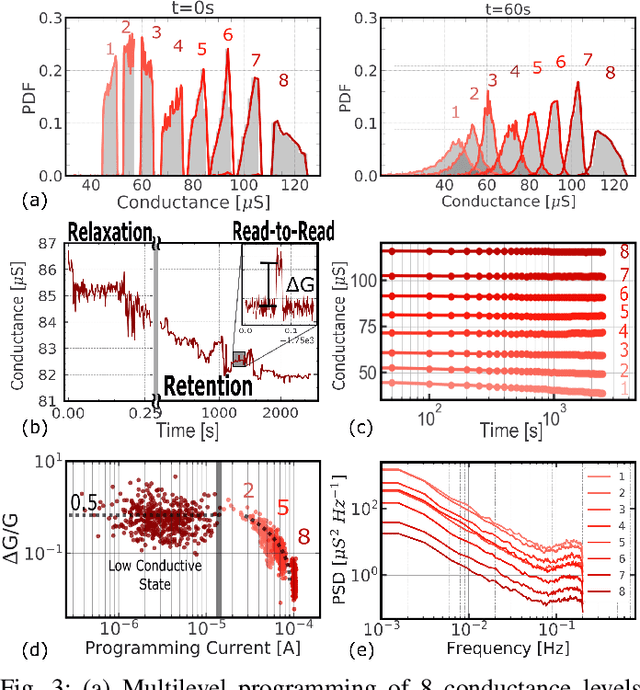
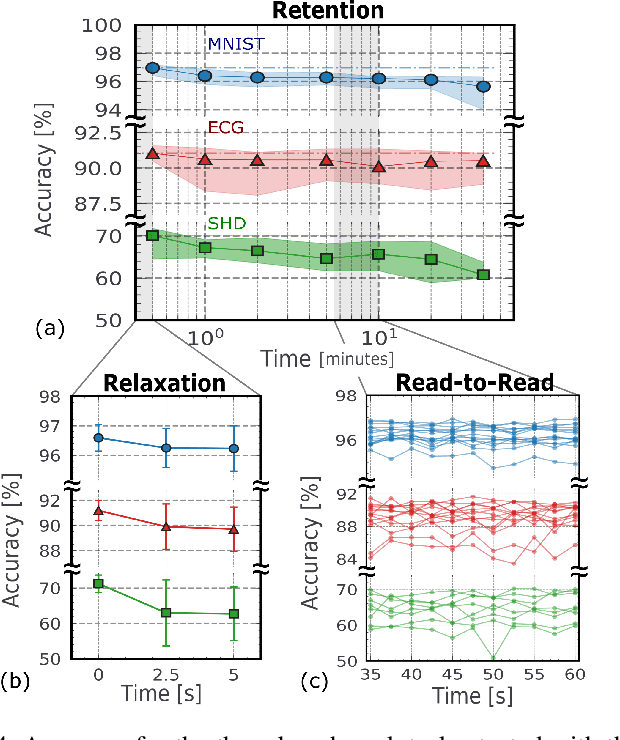
Spiking Neural Networks (SNNs) can unleash the full power of analog Resistive Random Access Memories (RRAMs) based circuits for low power signal processing. Their inherent computational sparsity naturally results in energy efficiency benefits. The main challenge implementing robust SNNs is the intrinsic variability (heterogeneity) of both analog CMOS circuits and RRAM technology. In this work, we assessed the performance and variability of RRAM-based neuromorphic circuits that were designed and fabricated using a 130\,nm technology node. Based on these results, we propose a Neuromorphic Hardware Calibrated (NHC) SNN, where the learning circuits are calibrated on the measured data. We show that by taking into account the measured heterogeneity characteristics in the off-chip learning phase, the NHC SNN self-corrects its hardware non-idealities and learns to solve benchmark tasks with high accuracy. This work demonstrates how to cope with the heterogeneity of neurons and synapses for increasing classification accuracy in temporal tasks.