 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning in Spiking Neural Networks with a Calcium-based Hebbian Rule for Spike-timing-dependent Plasticity
Apr 09, 2025

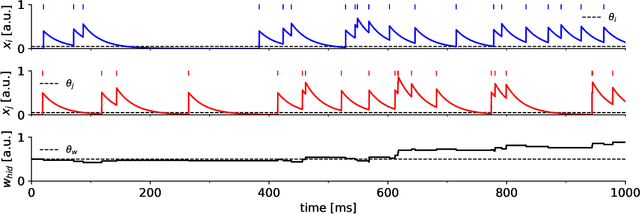

Understanding how biological neural networks are shaped via local plasticity mechanisms can lead to energy-efficient and self-adaptive information processing systems, which promises to mitigate some of the current roadblocks in edge computing systems. While biology makes use of spikes to seamless use both spike timing and mean firing rate to modulate synaptic strength, most models focus on one of the two. In this work, we present a Hebbian local learning rule that models synaptic modification as a function of calcium traces tracking neuronal activity. We show how the rule reproduces results from spike time and spike rate protocols from neuroscientific studies. Moreover, we use the model to train spiking neural networks on MNIST digit recognition to show and explain what sort of mechanisms are needed to learn real-world patterns. We show how our model is sensitive to correlated spiking activity and how this enables it to modulate the learning rate of the network without altering the mean firing rate of the neurons nor the hyparameters of the learning rule. To the best of our knowledge, this is the first work that showcases how spike timing and rate can be complementary in their role of shaping the connectivity of spiking neural networks.
FPGA Implementation of An Event-driven Saliency-based Selective Attention Model
Nov 25, 2022



Artificial vision systems of autonomous agents face very difficult challenges, as their vision sensors are required to transmit vast amounts of information to the processing stages, and to process it in real-time. One first approach to reduce data transmission is to use event-based vision sensors, whose pixels produce events only when there are changes in the input. However, even for event-based vision, transmission and processing of visual data can be quite onerous. Currently, these challenges are solved by using high-speed communication links and powerful machine vision processing hardware. But if resources are limited, instead of processing all the sensory information in parallel, an effective strategy is to divide the visual field into several small sub-regions, choose the region of highest saliency, process it, and shift serially the focus of attention to regions of decreasing saliency. This strategy, commonly used also by the visual system of many animals, is typically referred to as ``selective attention''. Here we present a digital architecture implementing a saliency-based selective visual attention model for processing asynchronous event-based sensory information received from a DVS. For ease of prototyping, we use a standard digital design flow and map the architecture on an FPGA. We describe the architecture block diagram highlighting the efficient use of the available hardware resources demonstrated through experimental results exploiting a hardware setup where the FPGA interfaced with the DVS camera.
Instantaneous Stereo Depth Estimation of Real-World Stimuli with a Neuromorphic Stereo-Vision Setup
Apr 06, 2021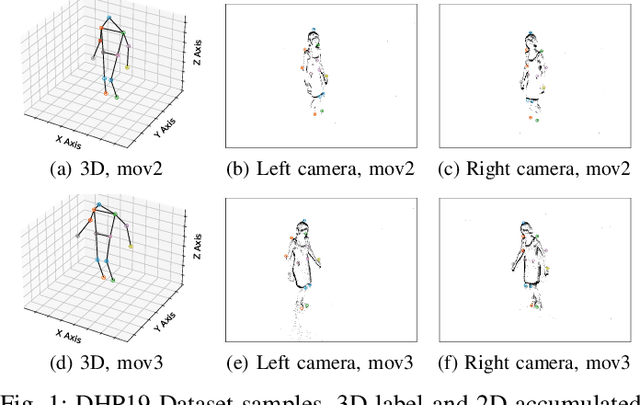
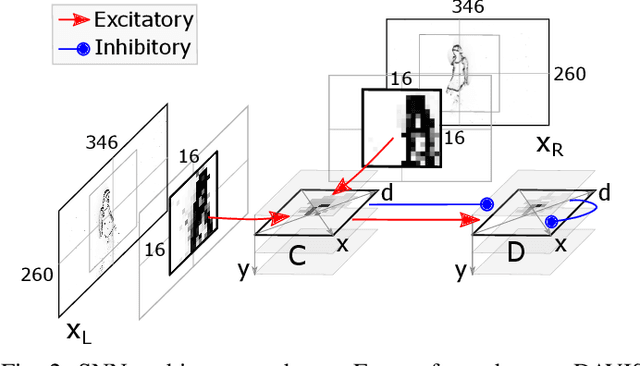
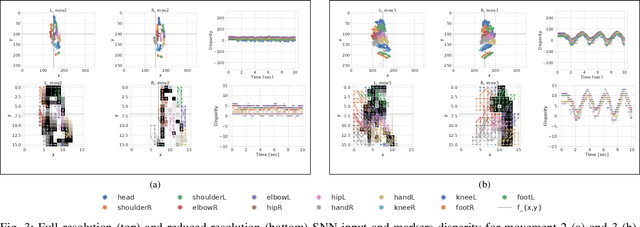
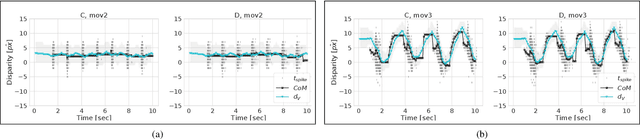
The stereo-matching problem, i.e., matching corresponding features in two different views to reconstruct depth, is efficiently solved in biology. Yet, it remains the computational bottleneck for classical machine vision approaches. By exploiting the properties of event cameras, recently proposed Spiking Neural Network (SNN) architectures for stereo vision have the potential of simplifying the stereo-matching problem. Several solutions that combine event cameras with spike-based neuromorphic processors already exist. However, they are either simulated on digital hardware or tested on simplified stimuli. In this work, we use the Dynamic Vision Sensor 3D Human Pose Dataset (DHP19) to validate a brain-inspired event-based stereo-matching architecture implemented on a mixed-signal neuromorphic processor with real-world data. Our experiments show that this SNN architecture, composed of coincidence detectors and disparity sensitive neurons, is able to provide a coarse estimate of the input disparity instantaneously, thereby detecting the presence of a stimulus moving in depth in real-time.
Closed-loop spiking control on a neuromorphic processor implemented on the iCub
Sep 01, 2020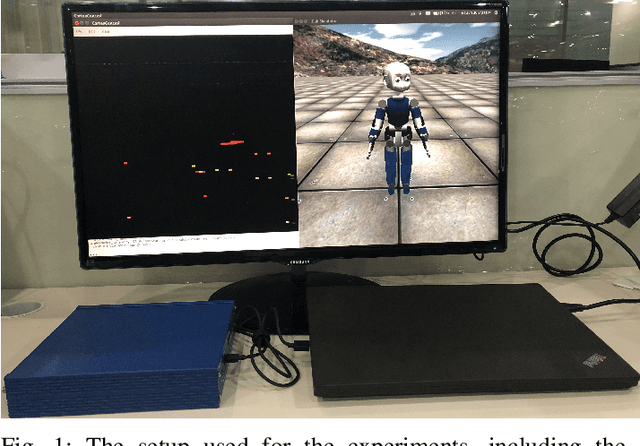
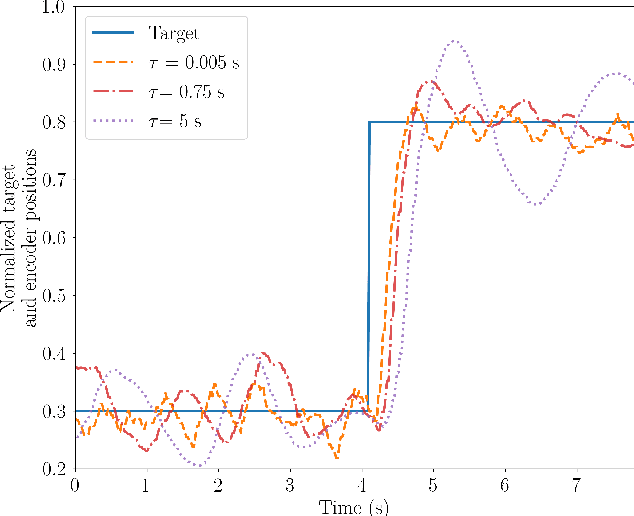
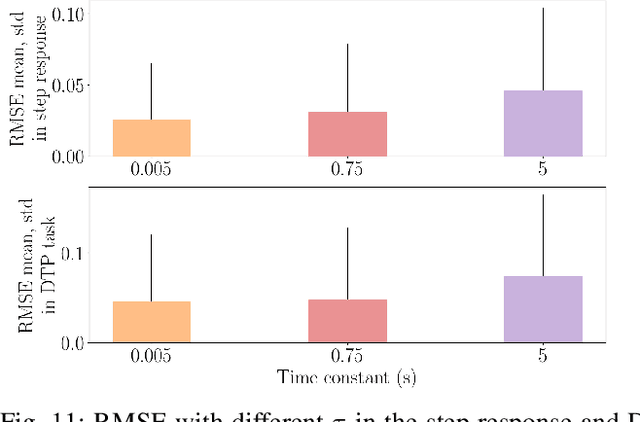
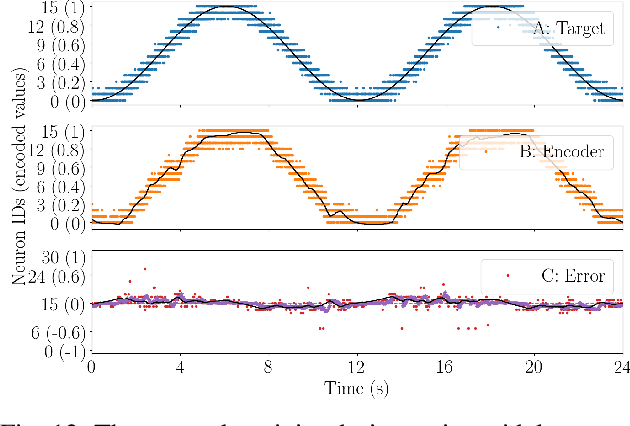
Despite neuromorphic engineering promises the deployment of low latency, adaptive and low power systems that can lead to the design of truly autonomous artificial agents, the development of a fully neuromorphic artificial agent is still missing. While neuromorphic sensing and perception, as well as decision-making systems, are now mature, the control and actuation part is lagging behind. In this paper, we present a closed-loop motor controller implemented on mixed-signal analog-digital neuromorphic hardware using a spiking neural network. The network performs a proportional control action by encoding target, feedback, and error signals using a spiking relational network. It continuously calculates the error through a connectivity pattern, which relates the three variables by means of feed-forward connections. Recurrent connections within each population are used to speed up the convergence, decrease the effect of mismatch and improve selectivity. The neuromorphic motor controller is interfaced with the iCub robot simulator. We tested our spiking P controller in a single joint control task, specifically for the robot head yaw. The spiking controller sends the target positions, reads the motor state from its encoder, and sends back the motor commands to the joint. The performance of the spiking controller is tested in a step response experiment and in a target pursuit task. In this work, we optimize the network structure to make it more robust to noisy inputs and device mismatch, which leads to better control performances.