 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerating Visual Reinforcement Learning with Separate Primitive Policy for Peg-in-Hole Tasks
Apr 21, 2025For peg-in-hole tasks, humans rely on binocular visual perception to locate the peg above the hole surface and then proceed with insertion. This paper draws insights from this behavior to enable agents to learn efficient assembly strategies through visual reinforcement learning. Hence, we propose a Separate Primitive Policy (S2P) to simultaneously learn how to derive location and insertion actions. S2P is compatible with model-free reinforcement learning algorithms. Ten insertion tasks featuring different polygons are developed as benchmarks for evaluations. Simulation experiments show that S2P can boost the sample efficiency and success rate even with force constraints. Real-world experiments are also performed to verify the feasibility of S2P. Ablations are finally given to discuss the generalizability of S2P and some factors that affect its performance.
Transformer-Enhanced Motion Planner: Attention-Guided Sampling for State-Specific Decision Making
Apr 30, 2024


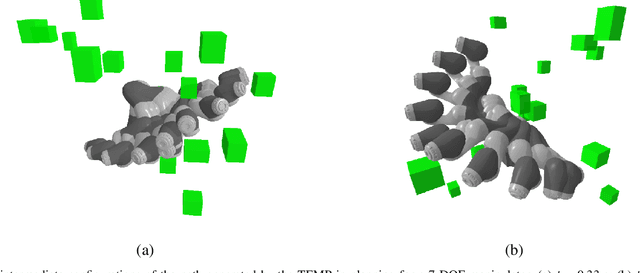
Sampling-based motion planning (SBMP) algorithms are renowned for their robust global search capabilities. However, the inherent randomness in their sampling mechanisms often result in inconsistent path quality and limited search efficiency. In response to these challenges, this work proposes a novel deep learning-based motion planning framework, named Transformer-Enhanced Motion Planner (TEMP), which synergizes an Environmental Information Semantic Encoder (EISE) with a Motion Planning Transformer (MPT). EISE converts environmental data into semantic environmental information (SEI), providing MPT with an enriched environmental comprehension. MPT leverages an attention mechanism to dynamically recalibrate its focus on SEI, task objectives, and historical planning data, refining the sampling node generation. To demonstrate the capabilities of TEMP, we train our model using a dataset comprised of planning results produced by the RRT*. EISE and MPT are collaboratively trained, enabling EISE to autonomously learn and extract patterns from environmental data, thereby forming semantic representations that MPT could more effectively interpret and utilize for motion planning. Subsequently, we conducted a systematic evaluation of TEMP's efficacy across diverse task dimensions, which demonstrates that TEMP achieves exceptional performance metrics and a heightened degree of generalizability compared to state-of-the-art SBMPs.
Open-Source Reinforcement Learning Environments Implemented in MuJoCo with Franka Manipulator
Jan 11, 2024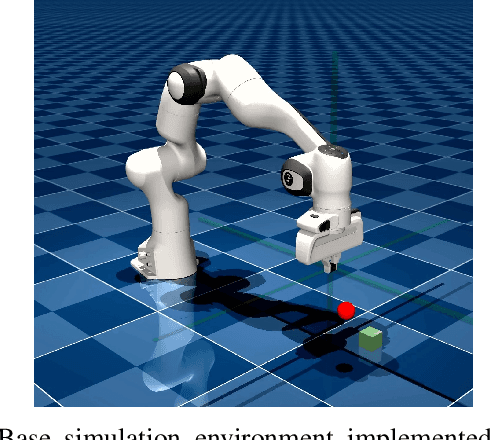
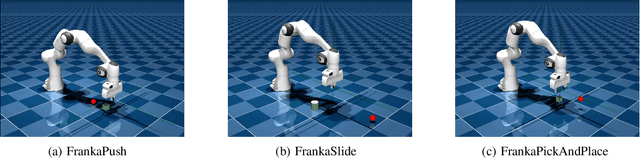
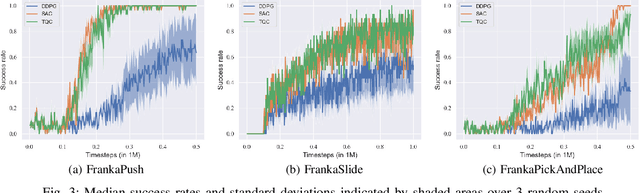
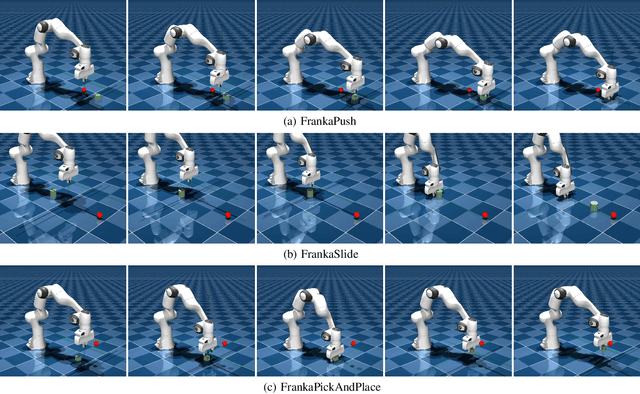
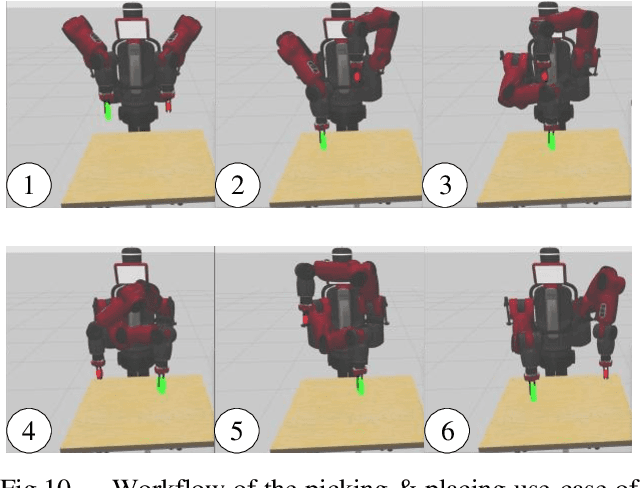
This paper presents three open-source reinforcement learning environments developed on the MuJoCo physics engine with the Franka Emika Panda arm in MuJoCo Menagerie. Three representative tasks, push, slide, and pick-and-place, are implemented through the Gymnasium Robotics API, which inherits from the core of Gymnasium. Both the sparse binary and dense rewards are supported, and the observation space contains the keys of desired and achieved goals to follow the Multi-Goal Reinforcement Learning framework. Three different off-policy algorithms are used to validate the simulation attributes to ensure the fidelity of all tasks, and benchmark results are also given. Each environment and task are defined in a clean way, and the main parameters for modifying the environment are preserved to reflect the main difference. The repository, including all environments, is available at https://github.com/zichunxx/panda_mujoco_gym.
PetLock:A Genderless and Standard Interface for the Future On-orbit Construction
Sep 09, 2022

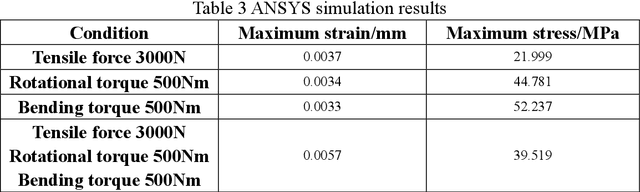
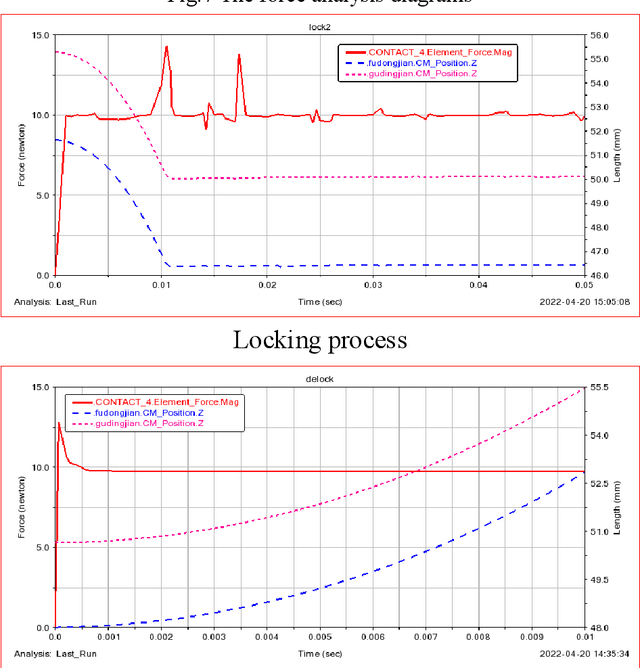
Modular design is the foundation of on orbit construction technology of large space facilities in the future.Standard interface is the key technology of modular design of the future space robotic systems and space facilities.This paper presents the designed and tested of PetLock,a standard and genderless interface which can transfer mechanical loads,power and data between the future modular space robotic manipulator and spacecraft.PetLock adopts a completely genderless design,including connection face,locking mechanism,data and power interface.The connection surface provides a large translation and rotation misalignment tolerance,due to its 120-degree symmetrical and 3D shape design.The locking mechanism features the three locking pins retraction structure design,which is simple and reliable.POGO pin connectors in the center of the interface provides the power and data transfer capabilities.Due to the advantages of high locking force,large tolerance,high reliability and low cost,PetLock has the very big application potential in future on orbit construction missions.
A Combined Inverse Kinematics Algorithm Using FABRIK with Optimization
Sep 06, 2022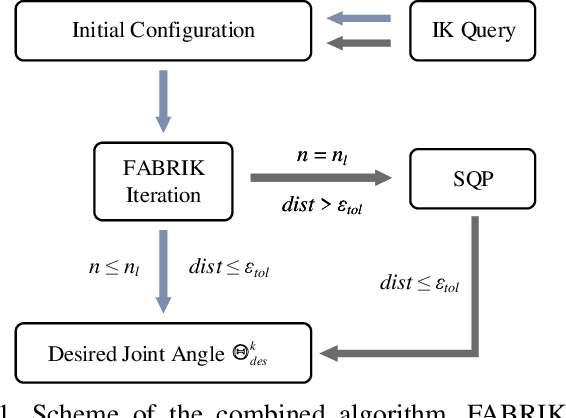



Forward and backward reaching inverse kinematics (FABRIK) is a heuristic inverse kinematics solver that is gradually applied to manipulators with the advantages of fast convergence and generating more realistic configurations. However, under the high error constraint, FABRIK exhibits unstable convergence behavior, which is unsatisfactory for the real-time motion planning of manipulators. In this paper, a novel inverse kinematics algorithm that combines FABRIK and the sequential quadratic programming (SQP) algorithm is presented, in which the joint angles deduced by FABRIK will be taken as the initial seed of the SQP algorithm to avoid getting stuck in local minima. The combined algorithm is evaluated with experiments, in which our algorithm can achieve higher success rates and faster solution times than FABRIK under the high error constraint. Furthermore, the combined algorithm can generate continuous trajectories for the UR5 and KUKA LBR IIWA 14 R820 manipulators in path tracking with no pose error and permitted position error of the end-effector.
i-MYO: A Hybrid Prosthetic Hand Control System based on Eye-tracking, Augmented Reality and Myoelectric signal
May 18, 2022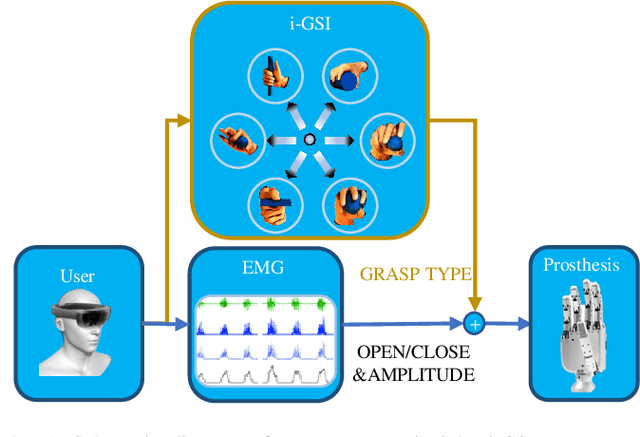
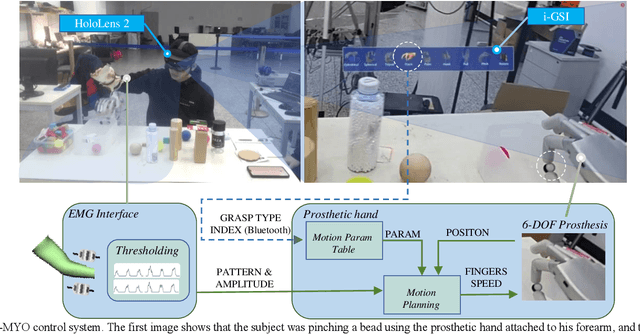
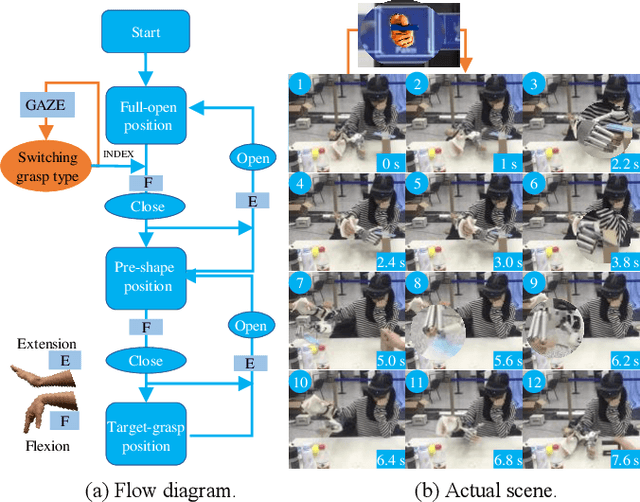
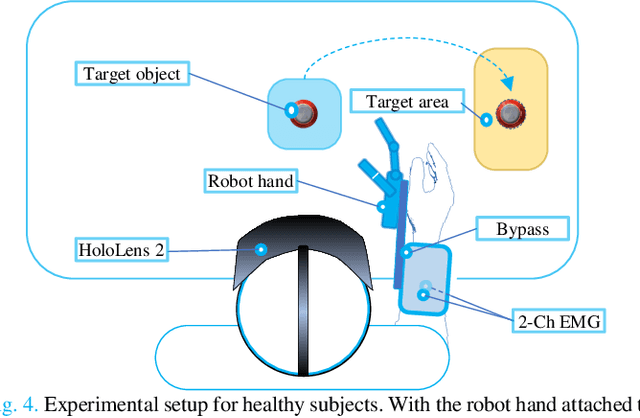
Dexterous prosthetic hands have better grasp performance than traditional ones. However, patients still find it difficult to use these hands without a suitable control system. A new hybrid myoelectric control system, termed i-MYO, is presented and evaluated to solve this problem. The core component of the i-MYO is a novel grasp-type switching interface based on eye-tracking and augmented reality (AR), termed i-GSI. With the i-GSI, the user can easily switch a grasp type (six total) for a prosthetic hand by gazing at a GazeButton. The i-GSI is implemented in an AR helmet and is integrated, as an individual module, into the i-MYO system. In the i-MYO system, the myoelectric signal was used to control hand opening /closing proportionally. The operation of the i-MYO was tested on nine healthy subjects who wore HIT-V hand on the forearm and manipulated objects in a reach-and-grasp task. It was also tested on one patient who had an inferior myoelectric signal and was required to control the HIT-V hand to grasp objects. Results showed that in 91.6% of the trials, inexperienced healthy subjects accomplished the task within 5.9 s, and most failed trials were caused by a lack of experience in fine grasping. In addition, in about 1.5% of trials, the subjects also successfully transferred the objects but with a non-optimal grasp type. In 97.0% of the trials, the subjects spent ~1.3 s switching the optimal grasp types. A higher success rate in grasp type (99.1%) for the untrained patient has been observed thanks to more trials conducted. In 98.7 % of trials, the patient only needed another 2 s to control the hand to grasp the object after switching to the optimal grasp type. The tests demonstrate the control capability of the new system in multi-DOF prosthetics, and all inexperienced subjects were able to master the operation of the i-MYO quickly within a few pieces of training and apply it easily.
i-GSI: A Fast and Reliable Grasp-type Switching Interface based on Augmented Reality and Eye-tracking
Apr 22, 2022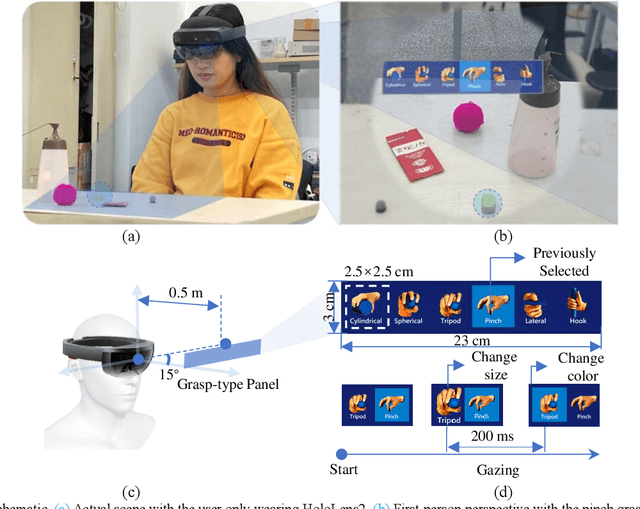
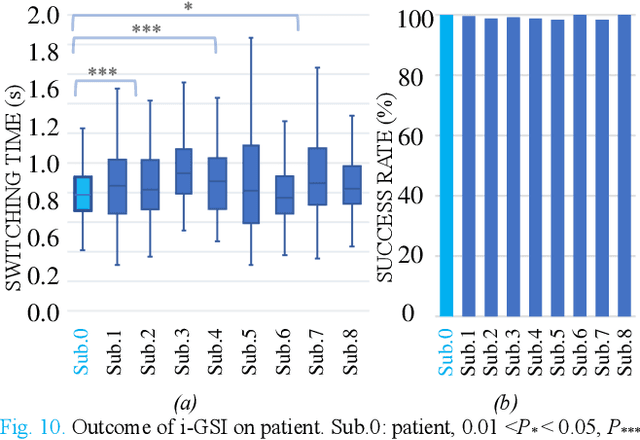
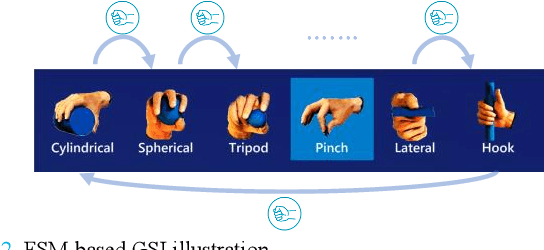

The control of multi-fingered dexterous prosthetics hand remains challenging due to the lack of an intuitive and efficient Grasp-type Switching Interface (GSI). We propose a new GSI (i-GSI) t hat integrates the manifold power of eye-tracking and augmentced reality technologies to solve this problem. It runs entirely in a HoloLens2 helmet, where users can glance at icons on the holographic interface to switch between six daily grasp types quickly. Compared to traditional GSIs (FSM-based, PR-based, and mobile APP-based), i-GSI achieved the best results in the experiment with eight healthy subjects, achieving a switching time of 0.84 s, a switching success rate of 99.0%, and learning efficiency of 93.50%. By verifying on one patient with a congenital upper limb deficiency, i-GSI achieved an equivalent great outcome as on healthy people, with a switching time of 0.78 s and switching success rate of 100%. The new i-GSI, as a standalone module, can be combined with traditional proportional myoelectric control to form a hybrid-controlled prosthetic system that can help patients accomplish dexterous operations in various daily-life activities.
Collision-Free Kinematics for Redundant Manipulators in Dynamic Scenes using Optimal Reciprocal Velocity Obstacles
Mar 09, 2019
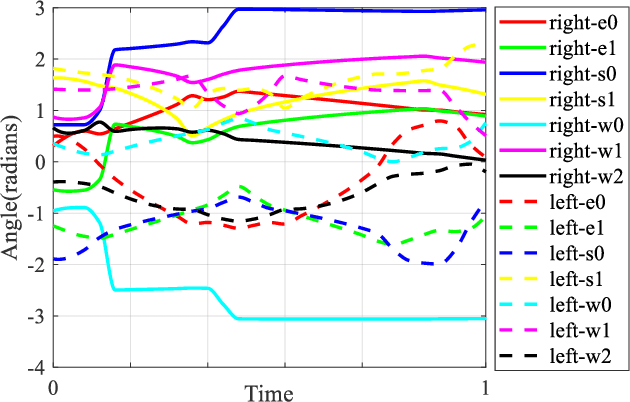
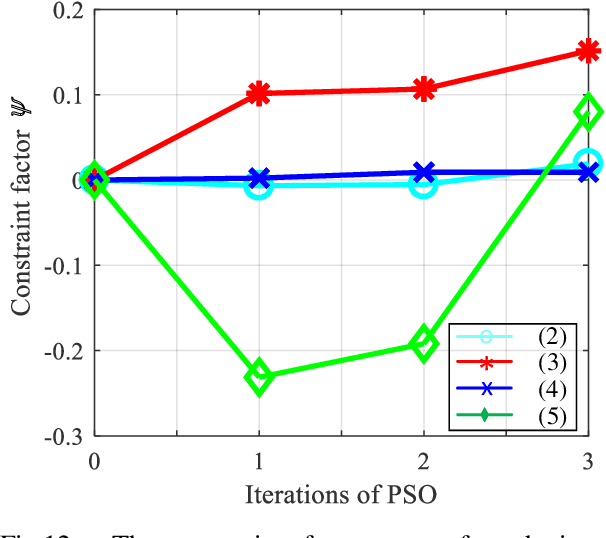
We present a novel algorithm for collision-free kinematics of multiple manipulators in a shared workspace with moving obstacles. Our optimization-based approach simultaneously handles collision-free constraints based on reciprocal velocity obstacles and inverse kinematics constraints for high-DOF manipulators. We present an efficient method based on particle swarm optimization that can generate collision-free configurations for each redundant manipulator. Furthermore, our approach can be used to compute safe and oscillation-free trajectories in a few milli-seconds. We highlight the real-time performance of our algorithm on multiple Baxter robots with 14-DOF manipulators operating in a workspace with dynamic obstacles. Videos are available at https://sites.google.com/view/collision-free-kinematics