 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Dexterous Grasp Learning from Single-View Point Clouds via a Multi-Object Scene Dataset
Mar 16, 2026Dexterous grasping in multi-object scene constitutes a fundamental challenge in robotic manipulation. Current mainstream grasping datasets predominantly focus on single-object scenarios and predefined grasp configurations, often neglecting environmental interference and the modeling of dexterous pre-grasp gesture, thereby limiting their generalizability in real-world applications. To address this, we propose DGS-Net, an end-to-end grasp prediction network capable of learning dense grasp configurations from single-view point clouds in multi-object scene. Furthermore, we propose a two-stage grasp data generation strategy that progresses from dense single-object grasp synthesis to dense scene-level grasp generation. Our dataset comprises 307 objects, 240 multi-object scenes, and over 350k validated grasps. By explicitly modeling grasp offsets and pre-grasp configurations, the dataset provides more robust and accurate supervision for dexterous grasp learning. Experimental results show that DGS-Net achieves grasp success rates of 88.63\% in simulation and 78.98\% on a real robotic platform, while exhibiting lower penetration with a mean penetration depth of 0.375 mm and penetration volume of 559.45 mm^3, outperforming existing methods and demonstrating strong effectiveness and generalization capability. Our dataset is available at https://github.com/4taotao8/DGS-Net.
Using Zone Inflation and Volume Transfer to Design a Fabric-based Pneumatic Exosuit with both Efficiency and Wearability
Oct 15, 2024Fabric-based pneumatic exosuits have a broad application prospect due to their good human-machine interaction performance, but their structural design paradigm has not yet been finalized and requires in-depth research. This paper proposes the concepts of zone inflation and volume transfer for the design of a fabric-based pneumatic exosuit with both efficiency and wearability. The meaning of zone inflation is to divide the inflation area of pneumatic exosuit into inflation-deflation zone and inflation-holding zone which can reduce the consumption of compressed air and improve efficiency. Volume transfer, a strategic distribution method of inflatable regions inside the garment, can effectively enhance the wearability of the exosuit. Using inexpensive thermoplastic polyurethane film and clothing fabric, the exosuit is made by heat pressing and sewing. The exosuit has a response time of 0.5s, a stress area of 1500mm2, and a profile of only 32mm, which can be hidden inside common clothing. A mathematical model is developed to predict the output torque of the exosuit with an error of 3.6%. Mechanical experiments show that the exosuit outputs a torque of 9.1Nm at a pressure of 100kPa. Surface electromyography experiments show that the exosuit can provide users with a boost from sitting to standing, with an average reduction in electromyography signals of 14.95%. The exosuit designed using these methods synthesizes efficiency and wearability and is expected to be an ideal paradigm for fabric-based pneumatic exosuits.
Volume Transfer: A New Design Concept for Fabric-Based Pneumatic Exosuits
Jan 11, 2024The fabric-based pneumatic exosuit is now a hot research topic because it is lighter and softer than traditional exoskeletons. Existing research focused more on the mechanical properties of the exosuit (e.g., torque and speed), but less on its wearability (e.g., appearance and comfort). This work presents a new design concept for fabric-based pneumatic exosuits Volume Transfer, which means transferring the volume of pneumatic actuators beyond the garments profile to the inside. This allows for a concealed appearance and a larger stress area while maintaining adequate torques. In order to verify this concept, we develop a fabric-based pneumatic exosuit for knee extension assistance. Its profile is only 26mm and its stress area wraps around almost half of the leg. We use a mathematical model and simulation to determine the parameters of the exosuit, avoiding multiple iterations of the prototype. Experiment results show that the exosuit can generate a torque of 7.6Nm at a pressure of 90kPa and produce a significant reduction in the electromyography activity of the knee extensor muscles. We believe that Volume Transfer could be utilized prevalently in future fabric-based pneumatic exosuit designs to achieve a significant improvement in wearability.
Viia-hand: a Reach-and-grasp Restoration System Integrating Voice interaction, Computer vision and Auditory feedback for Blind Amputees
Aug 14, 2023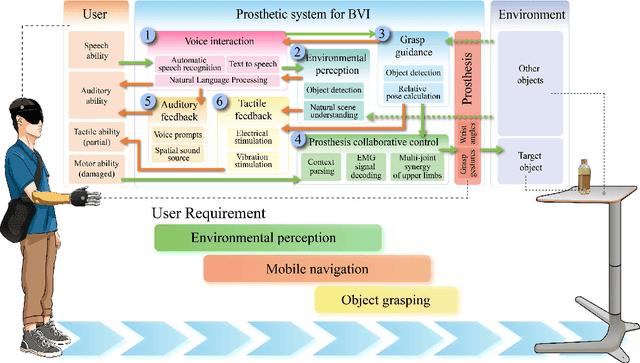
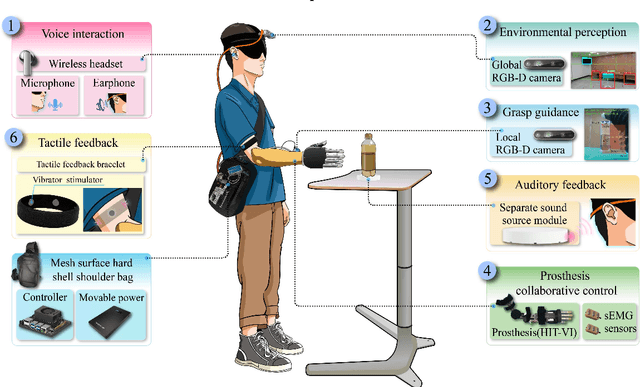
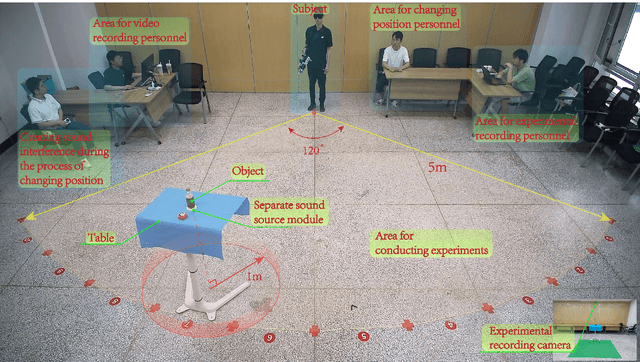
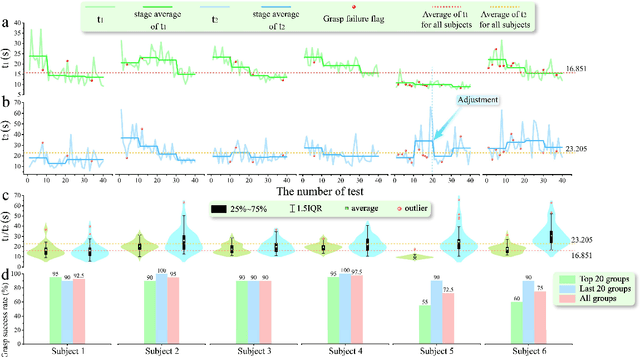
Visual feedback plays a crucial role in the process of amputation patients completing grasping in the field of prosthesis control. However, for blind and visually impaired (BVI) amputees, the loss of both visual and grasping abilities makes the "easy" reach-and-grasp task a feasible challenge. In this paper, we propose a novel multi-sensory prosthesis system helping BVI amputees with sensing, navigation and grasp operations. It combines modules of voice interaction, environmental perception, grasp guidance, collaborative control, and auditory/tactile feedback. In particular, the voice interaction module receives user instructions and invokes other functional modules according to the instructions. The environmental perception and grasp guidance module obtains environmental information through computer vision, and feedbacks the information to the user through auditory feedback modules (voice prompts and spatial sound sources) and tactile feedback modules (vibration stimulation). The prosthesis collaborative control module obtains the context information of the grasp guidance process and completes the collaborative control of grasp gestures and wrist angles of prosthesis in conjunction with the user's control intention in order to achieve stable grasp of various objects. This paper details a prototyping design (named viia-hand) and presents its preliminary experimental verification on healthy subjects completing specific reach-and-grasp tasks. Our results showed that, with the help of our new design, the subjects were able to achieve a precise reach and reliable grasp of the target objects in a relatively cluttered environment. Additionally, the system is extremely user-friendly, as users can quickly adapt to it with minimal training.
Prototype Design and Efficiency Analysis of a Novel Robot Drive Based on 3K-H-V Topology
Oct 05, 2022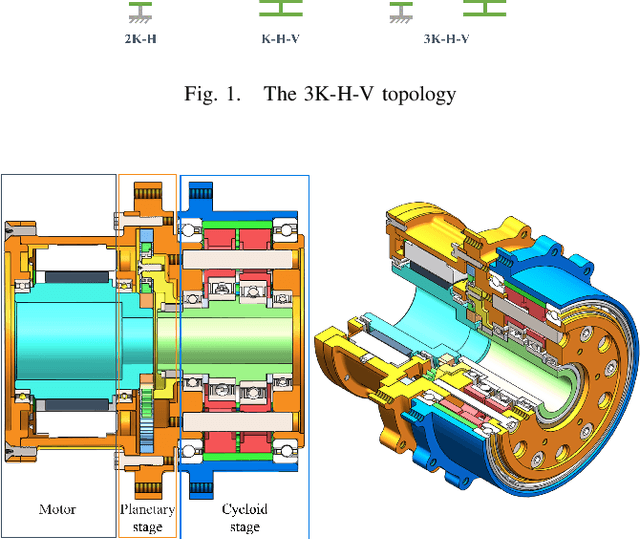
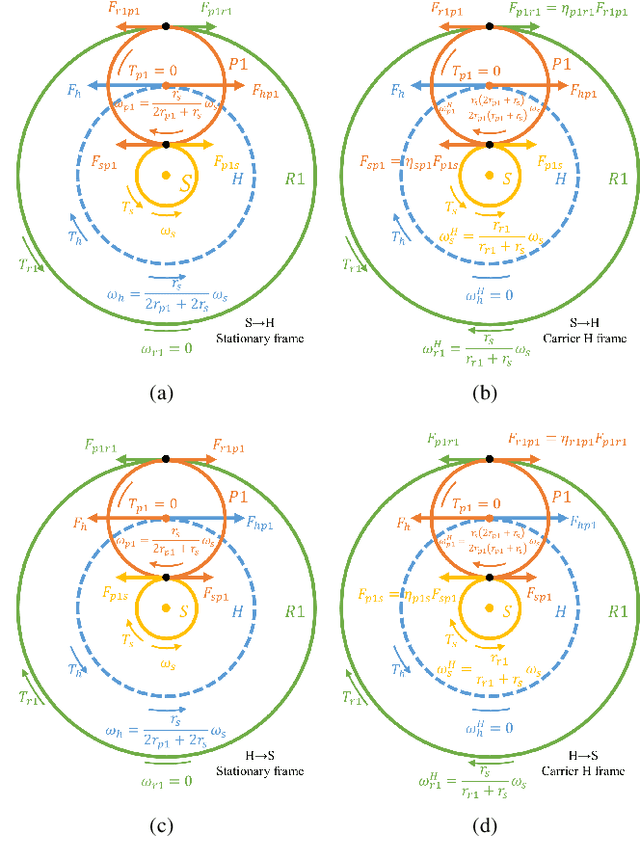
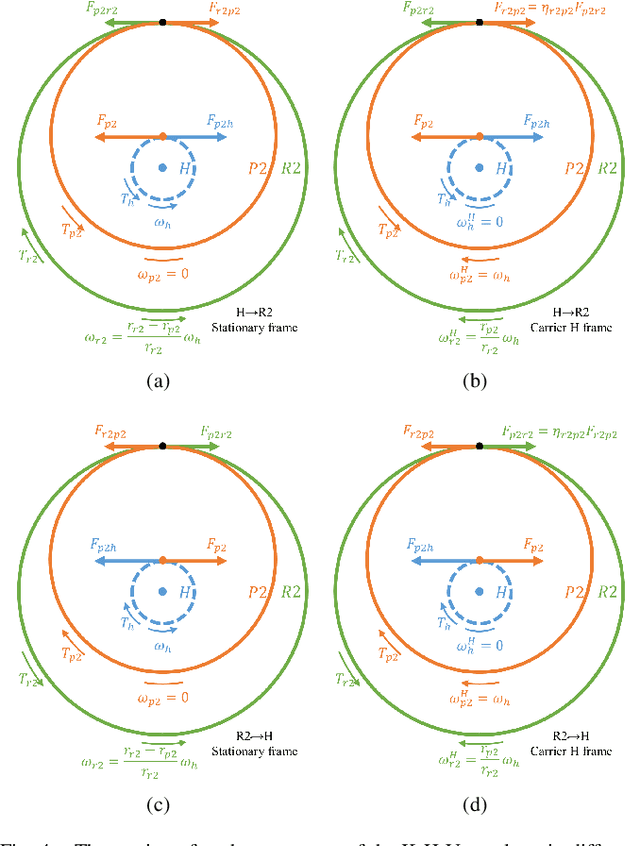
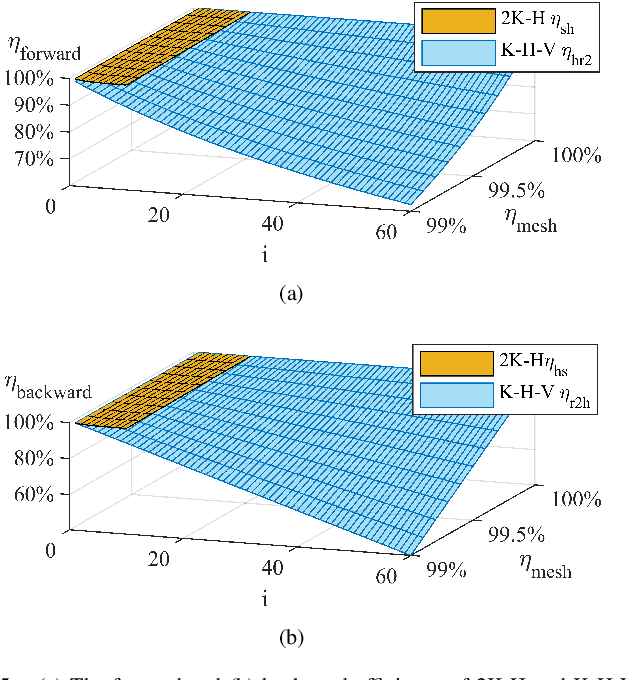
Robot actuators directly affect the performance of robots, and robot drives directly affect the performance of robot actuators. With the development of robotics, robots have put higher requirements on robot drives, such as high stiffness, high accuracy, high loading, high efficiency, low backlash, compact size, and hollow structure. In order to meet the demand development of robot actuators, this research base proposes a new robot drive based on 3K-H-V topology using involute and cycloidal gear shapes, planetary cycloidal drive, from the perspective of drive topology and through the design idea of decoupling. In this study, the reduction ratio and the efficiency model of the 3K-H-V topology were analyzed, and a prototype planetary cycloidal actuator was designed. The feasibility of the drive is initially verified by experimentally concluding that the PCA has a hollow structure, compact size, and high torque density (69 kg/Nm).
i-MYO: A Hybrid Prosthetic Hand Control System based on Eye-tracking, Augmented Reality and Myoelectric signal
May 18, 2022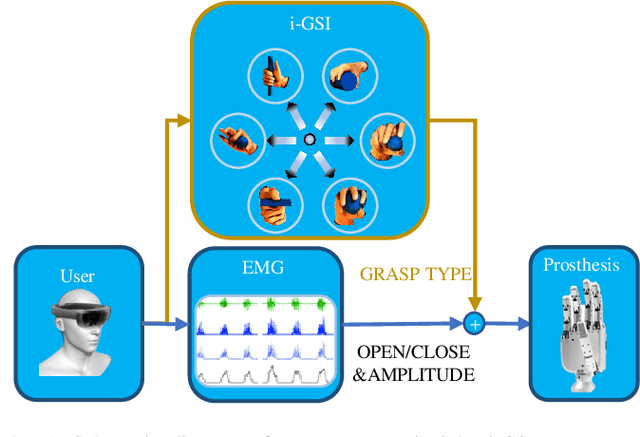
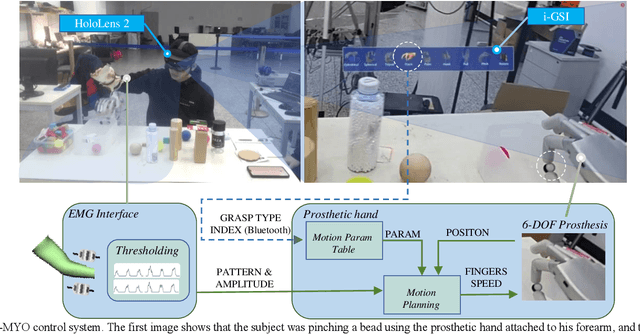
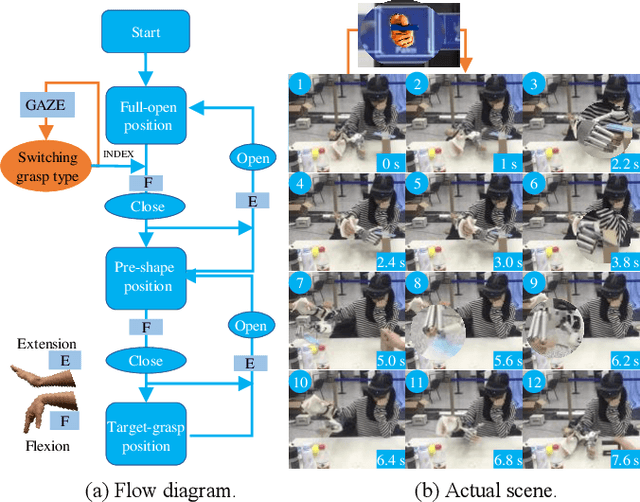
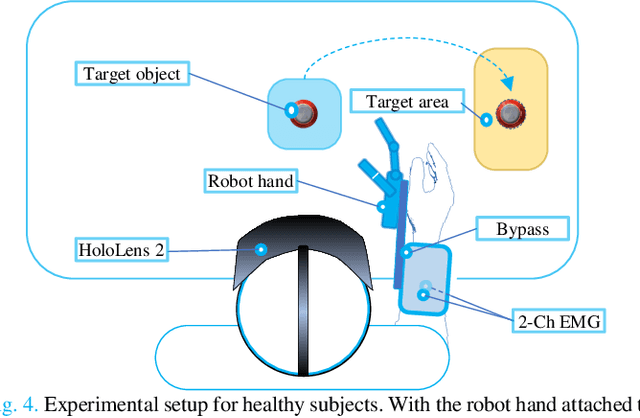
Dexterous prosthetic hands have better grasp performance than traditional ones. However, patients still find it difficult to use these hands without a suitable control system. A new hybrid myoelectric control system, termed i-MYO, is presented and evaluated to solve this problem. The core component of the i-MYO is a novel grasp-type switching interface based on eye-tracking and augmented reality (AR), termed i-GSI. With the i-GSI, the user can easily switch a grasp type (six total) for a prosthetic hand by gazing at a GazeButton. The i-GSI is implemented in an AR helmet and is integrated, as an individual module, into the i-MYO system. In the i-MYO system, the myoelectric signal was used to control hand opening /closing proportionally. The operation of the i-MYO was tested on nine healthy subjects who wore HIT-V hand on the forearm and manipulated objects in a reach-and-grasp task. It was also tested on one patient who had an inferior myoelectric signal and was required to control the HIT-V hand to grasp objects. Results showed that in 91.6% of the trials, inexperienced healthy subjects accomplished the task within 5.9 s, and most failed trials were caused by a lack of experience in fine grasping. In addition, in about 1.5% of trials, the subjects also successfully transferred the objects but with a non-optimal grasp type. In 97.0% of the trials, the subjects spent ~1.3 s switching the optimal grasp types. A higher success rate in grasp type (99.1%) for the untrained patient has been observed thanks to more trials conducted. In 98.7 % of trials, the patient only needed another 2 s to control the hand to grasp the object after switching to the optimal grasp type. The tests demonstrate the control capability of the new system in multi-DOF prosthetics, and all inexperienced subjects were able to master the operation of the i-MYO quickly within a few pieces of training and apply it easily.
i-GSI: A Fast and Reliable Grasp-type Switching Interface based on Augmented Reality and Eye-tracking
Apr 22, 2022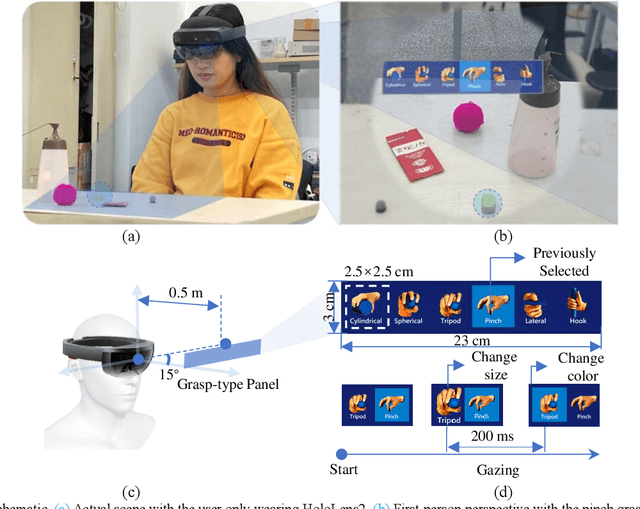
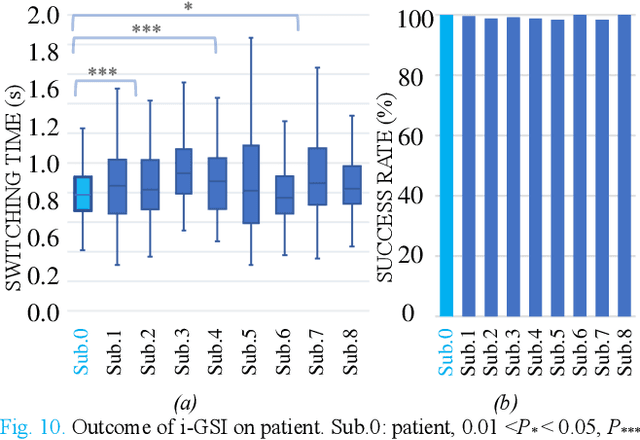
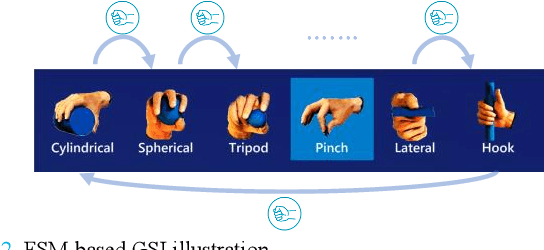

The control of multi-fingered dexterous prosthetics hand remains challenging due to the lack of an intuitive and efficient Grasp-type Switching Interface (GSI). We propose a new GSI (i-GSI) t hat integrates the manifold power of eye-tracking and augmentced reality technologies to solve this problem. It runs entirely in a HoloLens2 helmet, where users can glance at icons on the holographic interface to switch between six daily grasp types quickly. Compared to traditional GSIs (FSM-based, PR-based, and mobile APP-based), i-GSI achieved the best results in the experiment with eight healthy subjects, achieving a switching time of 0.84 s, a switching success rate of 99.0%, and learning efficiency of 93.50%. By verifying on one patient with a congenital upper limb deficiency, i-GSI achieved an equivalent great outcome as on healthy people, with a switching time of 0.78 s and switching success rate of 100%. The new i-GSI, as a standalone module, can be combined with traditional proportional myoelectric control to form a hybrid-controlled prosthetic system that can help patients accomplish dexterous operations in various daily-life activities.