 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Zone Inflation and Volume Transfer to Design a Fabric-based Pneumatic Exosuit with both Efficiency and Wearability
Oct 15, 2024Fabric-based pneumatic exosuits have a broad application prospect due to their good human-machine interaction performance, but their structural design paradigm has not yet been finalized and requires in-depth research. This paper proposes the concepts of zone inflation and volume transfer for the design of a fabric-based pneumatic exosuit with both efficiency and wearability. The meaning of zone inflation is to divide the inflation area of pneumatic exosuit into inflation-deflation zone and inflation-holding zone which can reduce the consumption of compressed air and improve efficiency. Volume transfer, a strategic distribution method of inflatable regions inside the garment, can effectively enhance the wearability of the exosuit. Using inexpensive thermoplastic polyurethane film and clothing fabric, the exosuit is made by heat pressing and sewing. The exosuit has a response time of 0.5s, a stress area of 1500mm2, and a profile of only 32mm, which can be hidden inside common clothing. A mathematical model is developed to predict the output torque of the exosuit with an error of 3.6%. Mechanical experiments show that the exosuit outputs a torque of 9.1Nm at a pressure of 100kPa. Surface electromyography experiments show that the exosuit can provide users with a boost from sitting to standing, with an average reduction in electromyography signals of 14.95%. The exosuit designed using these methods synthesizes efficiency and wearability and is expected to be an ideal paradigm for fabric-based pneumatic exosuits.
Physics-informed Deep Learning for Musculoskeletal Modelling: Predicting Muscle Forces and Joint Kinematics from Surface EMG
Jul 04, 2022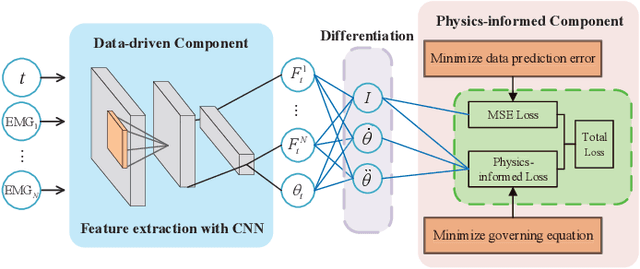
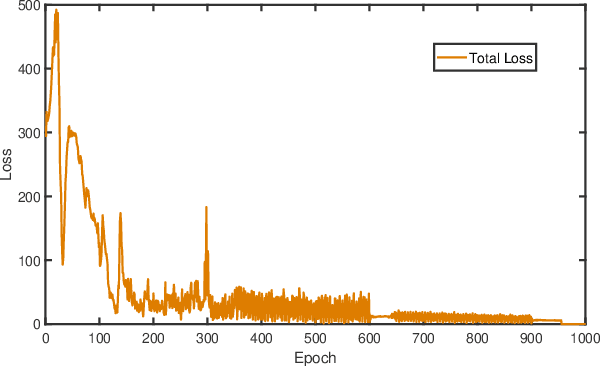
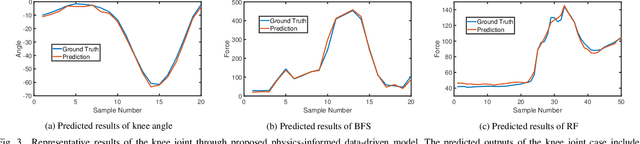
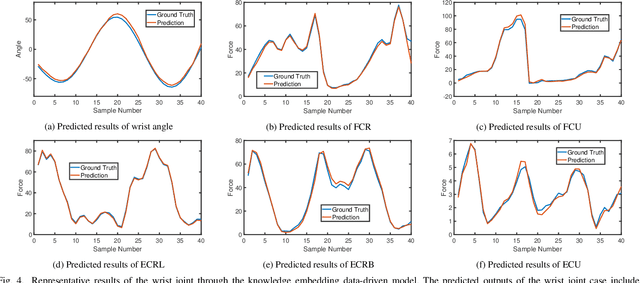
Musculoskeletal models have been widely used for detailed biomechanical analysis to characterise various functional impairments given their ability to estimate movement variables (i.e., muscle forces and joint moment) which cannot be readily measured in vivo. Physics-based computational neuromusculoskeletal models can interpret the dynamic interaction between neural drive to muscles, muscle dynamics, body and joint kinematics and kinetics. Still, such set of solutions suffers from slowness, especially for the complex models, hindering the utility in real-time applications. In recent years, data-driven methods has emerged as a promising alternative due to the benefits in speedy and simple implementation, but they cannot reflect the underlying neuromechanical processes. This paper proposes a physics-informed deep learning framework for musculoskeletal modelling, where physics-based domain knowledge is brought into the data-driven model as soft constraints to penalise/regularise the data-driven model. We use the synchronous muscle forces and joint kinematics prediction from surface electromyogram (sEMG) as the exemplar to illustrate the proposed framework. Convolutional neural network (CNN) is employed as the deep neural network to implement the proposed framework. At the same time, the physics law between muscle forces and joint kinematics is used the soft constraint. Experimental validations on two groups of data, including one benchmark dataset and one self-collected dataset from six healthy subjects, are performed. The experimental results demonstrate the effectiveness and robustness of the proposed framework.