 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe bionic neural network for external simulation of human locomotor system
Sep 11, 2023



Muscle forces and joint kinematics estimated with musculoskeletal (MSK) modeling techniques offer useful metrics describing movement quality. Model-based computational MSK models can interpret the dynamic interaction between the neural drive to muscles, muscle dynamics, body and joint kinematics, and kinetics. Still, such a set of solutions suffers from high computational time and muscle recruitment problems, especially in complex modeling. In recent years, data-driven methods have emerged as a promising alternative due to the benefits of flexibility and adaptability. However, a large amount of labeled training data is not easy to be acquired. This paper proposes a physics-informed deep learning method based on MSK modeling to predict joint motion and muscle forces. The MSK model is embedded into the neural network as an ordinary differential equation (ODE) loss function with physiological parameters of muscle activation dynamics and muscle contraction dynamics to be identified. These parameters are automatically estimated during the training process which guides the prediction of muscle forces combined with the MSK forward dynamics model. Experimental validations on two groups of data, including one benchmark dataset and one self-collected dataset from six healthy subjects, are performed. The results demonstrate that the proposed deep learning method can effectively identify subject-specific MSK physiological parameters and the trained physics-informed forward-dynamics surrogate yields accurate motion and muscle forces predictions.
The online learning architecture with edge computing for high-level control for assisting patients
Sep 10, 2023The prevalence of mobility impairments due to conditions such as spinal cord injuries, strokes, and degenerative diseases is on the rise globally. Lower-limb exoskeletons have been increasingly recognized as a viable solution for enhancing mobility and rehabilitation for individuals with such impairments. However, existing exoskeleton control systems often suffer from limitations such as latency, lack of adaptability, and computational inefficiency. To address these challenges, this paper introduces a novel online adversarial learning architecture integrated with edge computing for high-level lower-limb exoskeleton control. In the proposed architecture, sensor data from the user is processed in real-time through edge computing nodes, which then interact with an online adversarial learning model. This model adapts to the user's specific needs and controls the exoskeleton with minimal latency. Experimental evaluations demonstrate significant improvements in control accuracy and adaptability, as well as enhanced quality-of-service (QoS) metrics. These findings indicate that the integration of online adversarial learning with edge computing offers a robust and efficient approach for the next generation of lower-limb exoskeleton control systems.
A Physics-Informed Low-Shot Learning For sEMG-Based Estimation of Muscle Force and Joint Kinematics
Jul 08, 2023



Muscle force and joint kinematics estimation from surface electromyography (sEMG) are essential for real-time biomechanical analysis of the dynamic interplay among neural muscle stimulation, muscle dynamics, and kinetics. Recent advances in deep neural networks (DNNs) have shown the potential to improve biomechanical analysis in a fully automated and reproducible manner. However, the small sample nature and physical interpretability of biomechanical analysis limit the applications of DNNs. This paper presents a novel physics-informed low-shot learning method for sEMG-based estimation of muscle force and joint kinematics. This method seamlessly integrates Lagrange's equation of motion and inverse dynamic muscle model into the generative adversarial network (GAN) framework for structured feature decoding and extrapolated estimation from the small sample data. Specifically, Lagrange's equation of motion is introduced into the generative model to restrain the structured decoding of the high-level features following the laws of physics. And a physics-informed policy gradient is designed to improve the adversarial learning efficiency by rewarding the consistent physical representation of the extrapolated estimations and the physical references. Experimental validations are conducted on two scenarios (i.e. the walking trials and wrist motion trials). Results indicate that the estimations of the muscle forces and joint kinematics are unbiased compared to the physics-based inverse dynamics, which outperforms the selected benchmark methods, including physics-informed convolution neural network (PI-CNN), vallina generative adversarial network (GAN), and multi-layer extreme learning machine (ML-ELM).
Boosting Personalised Musculoskeletal Modelling with Physics-informed Knowledge Transfer
Nov 22, 2022



Data-driven methods have become increasingly more prominent for musculoskeletal modelling due to their conceptually intuitive simple and fast implementation. However, the performance of a pre-trained data-driven model using the data from specific subject(s) may be seriously degraded when validated using the data from a new subject, hindering the utility of the personalised musculoskeletal model in clinical applications. This paper develops an active physics-informed deep transfer learning framework to enhance the dynamic tracking capability of the musculoskeletal model on the unseen data. The salient advantages of the proposed framework are twofold: 1) For the generic model, physics-based domain knowledge is embedded into the loss function of the data-driven model as soft constraints to penalise/regularise the data-driven model. 2) For the personalised model, the parameters relating to the feature extraction will be directly inherited from the generic model, and only the parameters relating to the subject-specific inference will be finetuned by jointly minimising the conventional data prediction loss and the modified physics-based loss. In this paper, we use the synchronous muscle forces and joint kinematics prediction from surface electromyogram (sEMG) as the exemplar to illustrate the proposed framework. Moreover, convolutional neural network (CNN) is employed as the deep neural network to implement the proposed framework, and the physics law between muscle forces and joint kinematics is utilised as the soft constraints. Results of comprehensive experiments on a self-collected dataset from eight healthy subjects indicate the effectiveness and great generalization of the proposed framework.
Physics-informed Deep Learning for Musculoskeletal Modelling: Predicting Muscle Forces and Joint Kinematics from Surface EMG
Jul 04, 2022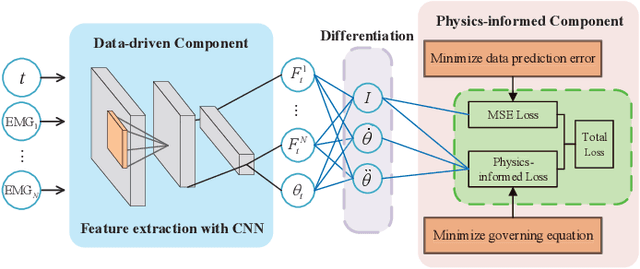
Musculoskeletal models have been widely used for detailed biomechanical analysis to characterise various functional impairments given their ability to estimate movement variables (i.e., muscle forces and joint moment) which cannot be readily measured in vivo. Physics-based computational neuromusculoskeletal models can interpret the dynamic interaction between neural drive to muscles, muscle dynamics, body and joint kinematics and kinetics. Still, such set of solutions suffers from slowness, especially for the complex models, hindering the utility in real-time applications. In recent years, data-driven methods has emerged as a promising alternative due to the benefits in speedy and simple implementation, but they cannot reflect the underlying neuromechanical processes. This paper proposes a physics-informed deep learning framework for musculoskeletal modelling, where physics-based domain knowledge is brought into the data-driven model as soft constraints to penalise/regularise the data-driven model. We use the synchronous muscle forces and joint kinematics prediction from surface electromyogram (sEMG) as the exemplar to illustrate the proposed framework. Convolutional neural network (CNN) is employed as the deep neural network to implement the proposed framework. At the same time, the physics law between muscle forces and joint kinematics is used the soft constraint. Experimental validations on two groups of data, including one benchmark dataset and one self-collected dataset from six healthy subjects, are performed. The experimental results demonstrate the effectiveness and robustness of the proposed framework.