 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time object detection and robotic manipulation for agriculture using a YOLO-based learning approach
Jan 28, 2024The optimisation of crop harvesting processes for commonly cultivated crops is of great importance in the aim of agricultural industrialisation. Nowadays, the utilisation of machine vision has enabled the automated identification of crops, leading to the enhancement of harvesting efficiency, but challenges still exist. This study presents a new framework that combines two separate architectures of convolutional neural networks (CNNs) in order to simultaneously accomplish the tasks of crop detection and harvesting (robotic manipulation) inside a simulated environment. Crop images in the simulated environment are subjected to random rotations, cropping, brightness, and contrast adjustments to create augmented images for dataset generation. The you only look once algorithmic framework is employed with traditional rectangular bounding boxes for crop localization. The proposed method subsequently utilises the acquired image data via a visual geometry group model in order to reveal the grasping positions for the robotic manipulation.
Boosting Personalised Musculoskeletal Modelling with Physics-informed Knowledge Transfer
Nov 22, 2022



Data-driven methods have become increasingly more prominent for musculoskeletal modelling due to their conceptually intuitive simple and fast implementation. However, the performance of a pre-trained data-driven model using the data from specific subject(s) may be seriously degraded when validated using the data from a new subject, hindering the utility of the personalised musculoskeletal model in clinical applications. This paper develops an active physics-informed deep transfer learning framework to enhance the dynamic tracking capability of the musculoskeletal model on the unseen data. The salient advantages of the proposed framework are twofold: 1) For the generic model, physics-based domain knowledge is embedded into the loss function of the data-driven model as soft constraints to penalise/regularise the data-driven model. 2) For the personalised model, the parameters relating to the feature extraction will be directly inherited from the generic model, and only the parameters relating to the subject-specific inference will be finetuned by jointly minimising the conventional data prediction loss and the modified physics-based loss. In this paper, we use the synchronous muscle forces and joint kinematics prediction from surface electromyogram (sEMG) as the exemplar to illustrate the proposed framework. Moreover, convolutional neural network (CNN) is employed as the deep neural network to implement the proposed framework, and the physics law between muscle forces and joint kinematics is utilised as the soft constraints. Results of comprehensive experiments on a self-collected dataset from eight healthy subjects indicate the effectiveness and great generalization of the proposed framework.
Physics-informed Deep Learning for Musculoskeletal Modelling: Predicting Muscle Forces and Joint Kinematics from Surface EMG
Jul 04, 2022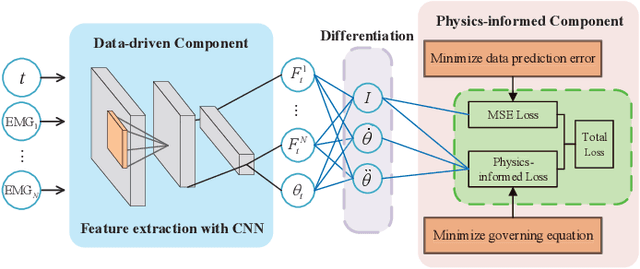
Musculoskeletal models have been widely used for detailed biomechanical analysis to characterise various functional impairments given their ability to estimate movement variables (i.e., muscle forces and joint moment) which cannot be readily measured in vivo. Physics-based computational neuromusculoskeletal models can interpret the dynamic interaction between neural drive to muscles, muscle dynamics, body and joint kinematics and kinetics. Still, such set of solutions suffers from slowness, especially for the complex models, hindering the utility in real-time applications. In recent years, data-driven methods has emerged as a promising alternative due to the benefits in speedy and simple implementation, but they cannot reflect the underlying neuromechanical processes. This paper proposes a physics-informed deep learning framework for musculoskeletal modelling, where physics-based domain knowledge is brought into the data-driven model as soft constraints to penalise/regularise the data-driven model. We use the synchronous muscle forces and joint kinematics prediction from surface electromyogram (sEMG) as the exemplar to illustrate the proposed framework. Convolutional neural network (CNN) is employed as the deep neural network to implement the proposed framework. At the same time, the physics law between muscle forces and joint kinematics is used the soft constraint. Experimental validations on two groups of data, including one benchmark dataset and one self-collected dataset from six healthy subjects, are performed. The experimental results demonstrate the effectiveness and robustness of the proposed framework.
A Coupling Enhancement Algorithm for ZrO2 Ceramic Bearing Ball Surface Defect Detection Based on Cartoon-texture Decomposition Model and Multi-Scale Filtering Method
May 23, 2022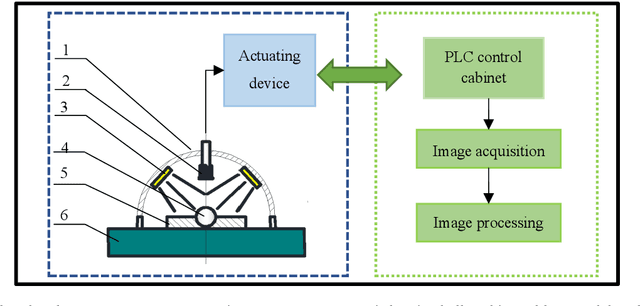
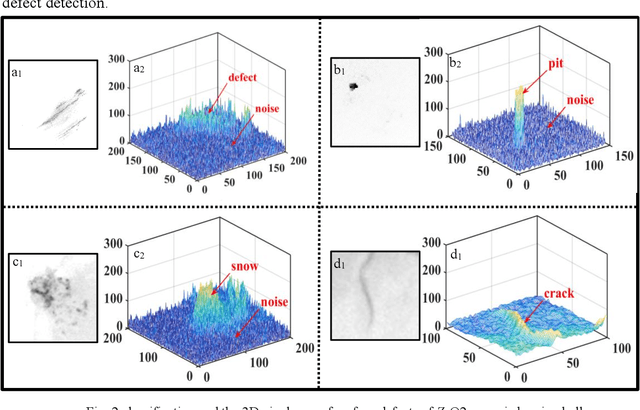
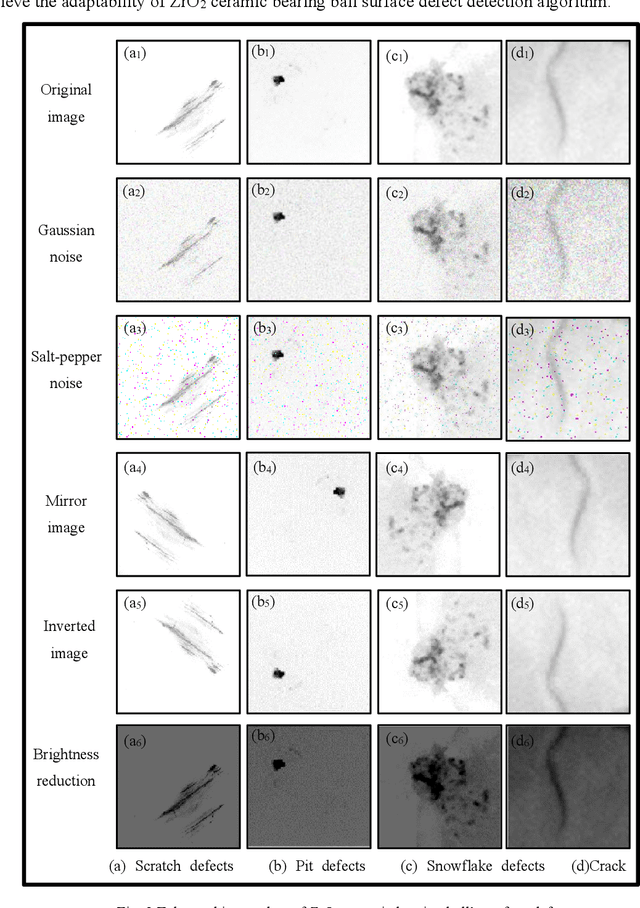
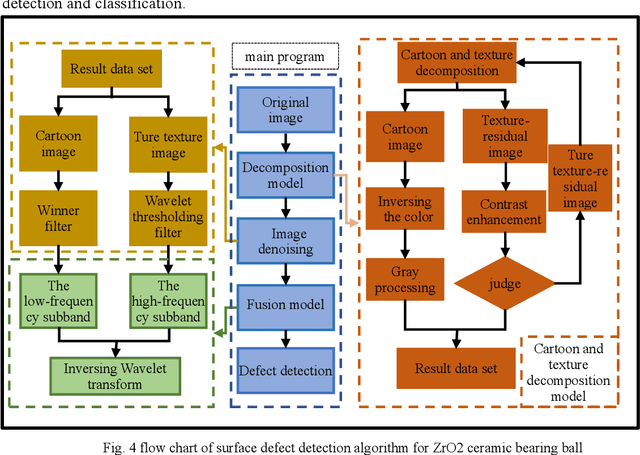
This study aimed to improve the surface defect detection accuracy of ZrO2 ceramic bearing balls. Combined with the noise damage of the image samples, a surface defect detection method for ZrO2 ceramic bearing balls based on cartoon-texture decomposition model was proposed. Building a ZrO2 ceramic bearing ball surface defect detection system. The ZrO2 ceramic bearing ball surface defect image was decomposed by using the Gaussian curvature model and the decomposed image layer was filtered by using Winner filter and wavelet value domain filter. Then they were fused into a clear and undamaged ZrO2 ceramic bearing ball surface defect image and detected. The experimental results show that the image denoising method of ZrO2 ceramic bearing ball surface defect based on cartoon-texture decomposition model can denoise while retaining the image details. The PSNR of image is 34.1 dB, the SSIM is 0.9476, the detection accuracy is 95.8%, and the detection speed of a single defect image is 191ms / img. This method can effectively improve the efficiency and accuracy of ZrO2 ceramic bearing ball surface defect detection.