 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgei-MYO: A Hybrid Prosthetic Hand Control System based on Eye-tracking, Augmented Reality and Myoelectric signal
Paper and Code
May 18, 2022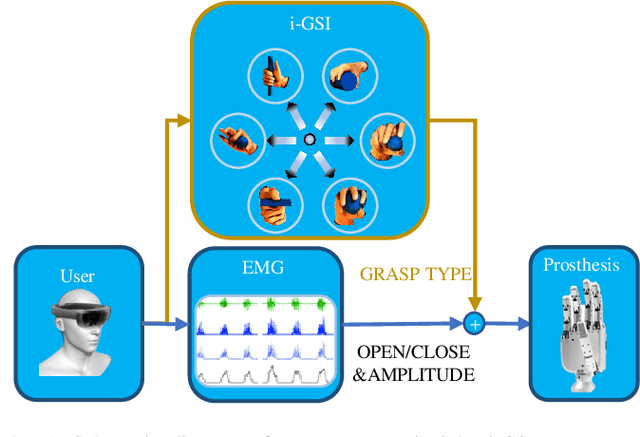
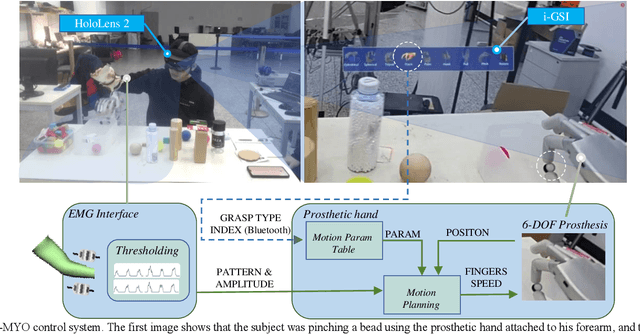
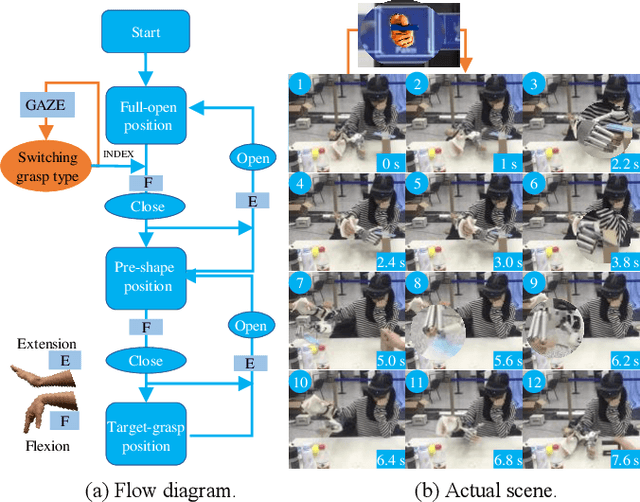
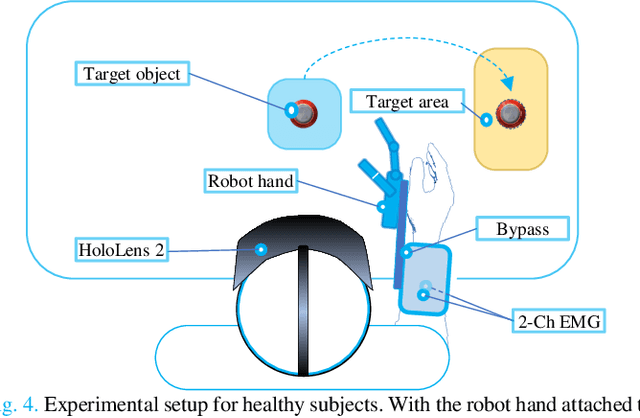
Dexterous prosthetic hands have better grasp performance than traditional ones. However, patients still find it difficult to use these hands without a suitable control system. A new hybrid myoelectric control system, termed i-MYO, is presented and evaluated to solve this problem. The core component of the i-MYO is a novel grasp-type switching interface based on eye-tracking and augmented reality (AR), termed i-GSI. With the i-GSI, the user can easily switch a grasp type (six total) for a prosthetic hand by gazing at a GazeButton. The i-GSI is implemented in an AR helmet and is integrated, as an individual module, into the i-MYO system. In the i-MYO system, the myoelectric signal was used to control hand opening /closing proportionally. The operation of the i-MYO was tested on nine healthy subjects who wore HIT-V hand on the forearm and manipulated objects in a reach-and-grasp task. It was also tested on one patient who had an inferior myoelectric signal and was required to control the HIT-V hand to grasp objects. Results showed that in 91.6% of the trials, inexperienced healthy subjects accomplished the task within 5.9 s, and most failed trials were caused by a lack of experience in fine grasping. In addition, in about 1.5% of trials, the subjects also successfully transferred the objects but with a non-optimal grasp type. In 97.0% of the trials, the subjects spent ~1.3 s switching the optimal grasp types. A higher success rate in grasp type (99.1%) for the untrained patient has been observed thanks to more trials conducted. In 98.7 % of trials, the patient only needed another 2 s to control the hand to grasp the object after switching to the optimal grasp type. The tests demonstrate the control capability of the new system in multi-DOF prosthetics, and all inexperienced subjects were able to master the operation of the i-MYO quickly within a few pieces of training and apply it easily.