 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgei-MYO: A Hybrid Prosthetic Hand Control System based on Eye-tracking, Augmented Reality and Myoelectric signal
May 18, 2022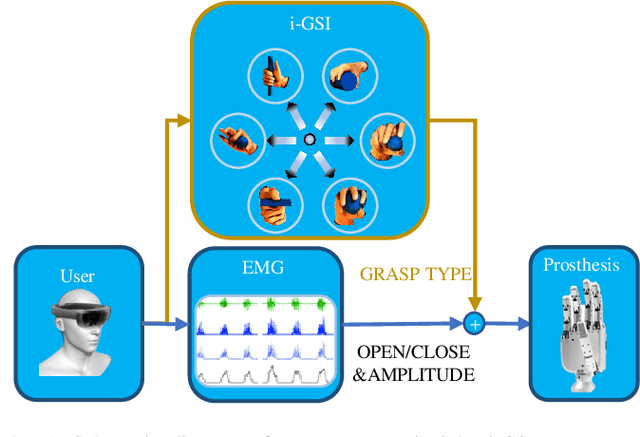
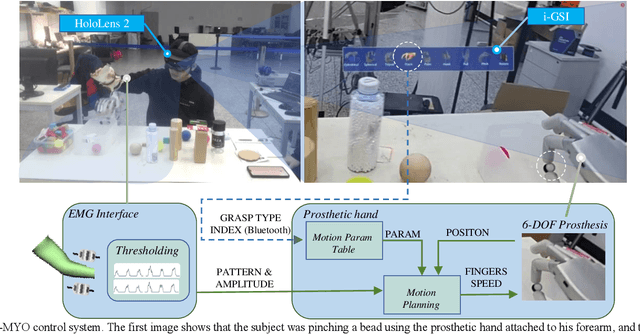
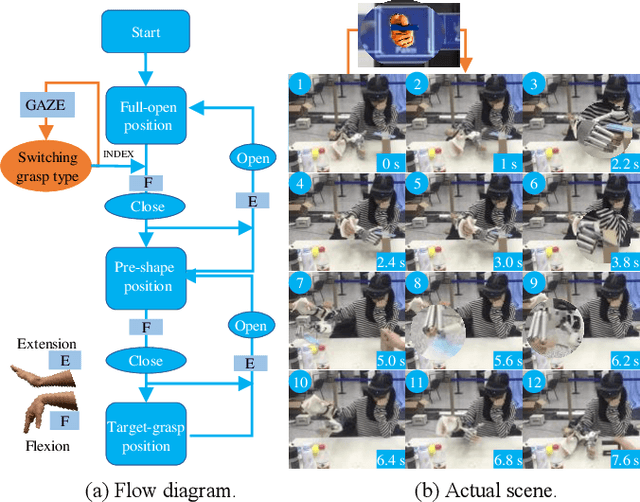
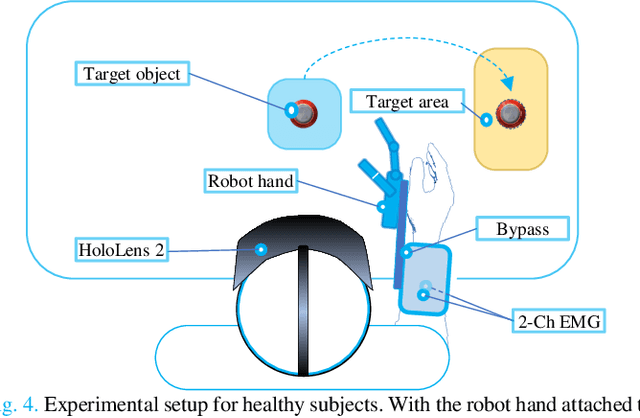
Dexterous prosthetic hands have better grasp performance than traditional ones. However, patients still find it difficult to use these hands without a suitable control system. A new hybrid myoelectric control system, termed i-MYO, is presented and evaluated to solve this problem. The core component of the i-MYO is a novel grasp-type switching interface based on eye-tracking and augmented reality (AR), termed i-GSI. With the i-GSI, the user can easily switch a grasp type (six total) for a prosthetic hand by gazing at a GazeButton. The i-GSI is implemented in an AR helmet and is integrated, as an individual module, into the i-MYO system. In the i-MYO system, the myoelectric signal was used to control hand opening /closing proportionally. The operation of the i-MYO was tested on nine healthy subjects who wore HIT-V hand on the forearm and manipulated objects in a reach-and-grasp task. It was also tested on one patient who had an inferior myoelectric signal and was required to control the HIT-V hand to grasp objects. Results showed that in 91.6% of the trials, inexperienced healthy subjects accomplished the task within 5.9 s, and most failed trials were caused by a lack of experience in fine grasping. In addition, in about 1.5% of trials, the subjects also successfully transferred the objects but with a non-optimal grasp type. In 97.0% of the trials, the subjects spent ~1.3 s switching the optimal grasp types. A higher success rate in grasp type (99.1%) for the untrained patient has been observed thanks to more trials conducted. In 98.7 % of trials, the patient only needed another 2 s to control the hand to grasp the object after switching to the optimal grasp type. The tests demonstrate the control capability of the new system in multi-DOF prosthetics, and all inexperienced subjects were able to master the operation of the i-MYO quickly within a few pieces of training and apply it easily.
i-GSI: A Fast and Reliable Grasp-type Switching Interface based on Augmented Reality and Eye-tracking
Apr 22, 2022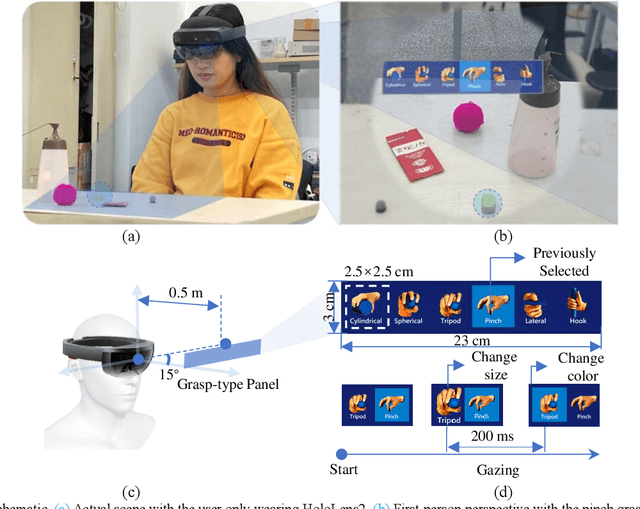
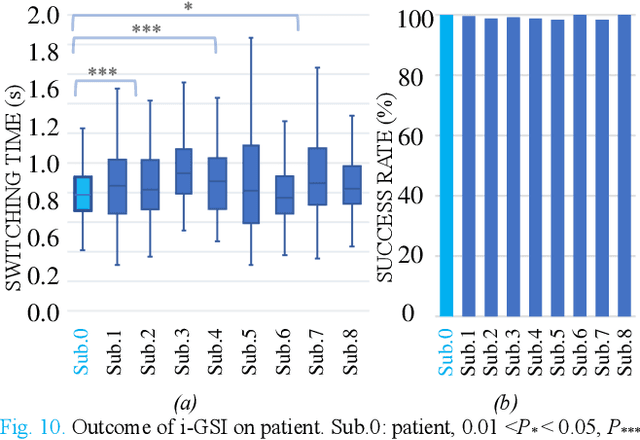
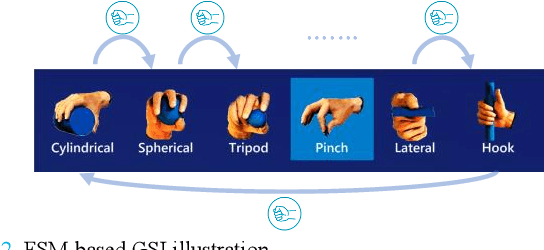

The control of multi-fingered dexterous prosthetics hand remains challenging due to the lack of an intuitive and efficient Grasp-type Switching Interface (GSI). We propose a new GSI (i-GSI) t hat integrates the manifold power of eye-tracking and augmentced reality technologies to solve this problem. It runs entirely in a HoloLens2 helmet, where users can glance at icons on the holographic interface to switch between six daily grasp types quickly. Compared to traditional GSIs (FSM-based, PR-based, and mobile APP-based), i-GSI achieved the best results in the experiment with eight healthy subjects, achieving a switching time of 0.84 s, a switching success rate of 99.0%, and learning efficiency of 93.50%. By verifying on one patient with a congenital upper limb deficiency, i-GSI achieved an equivalent great outcome as on healthy people, with a switching time of 0.78 s and switching success rate of 100%. The new i-GSI, as a standalone module, can be combined with traditional proportional myoelectric control to form a hybrid-controlled prosthetic system that can help patients accomplish dexterous operations in various daily-life activities.