 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHGCL: Hierarchical Graph Contrastive Learning for User-Item Recommendation
May 25, 2025Graph Contrastive Learning (GCL), which fuses graph neural networks with contrastive learning, has evolved as a pivotal tool in user-item recommendations. While promising, existing GCL methods often lack explicit modeling of hierarchical item structures, which represent item similarities across varying resolutions. Such hierarchical item structures are ubiquitous in various items (e.g., online products and local businesses), and reflect their inherent organizational properties that serve as critical signals for enhancing recommendation accuracy. In this paper, we propose Hierarchical Graph Contrastive Learning (HGCL), a novel GCL method that incorporates hierarchical item structures for user-item recommendations. First, HGCL pre-trains a GCL module using cross-layer contrastive learning to obtain user and item representations. Second, HGCL employs a representation compression and clustering method to construct a two-hierarchy user-item bipartite graph. Ultimately, HGCL fine-tunes user and item representations by learning on the hierarchical graph, and then provides recommendations based on user-item interaction scores. Experiments on three widely adopted benchmark datasets ranging from 70K to 382K nodes confirm the superior performance of HGCL over existing baseline models, highlighting the contribution of hierarchical item structures in enhancing GCL methods for recommendation tasks.
Prototype Design and Efficiency Analysis of a Novel Robot Drive Based on 3K-H-V Topology
Oct 05, 2022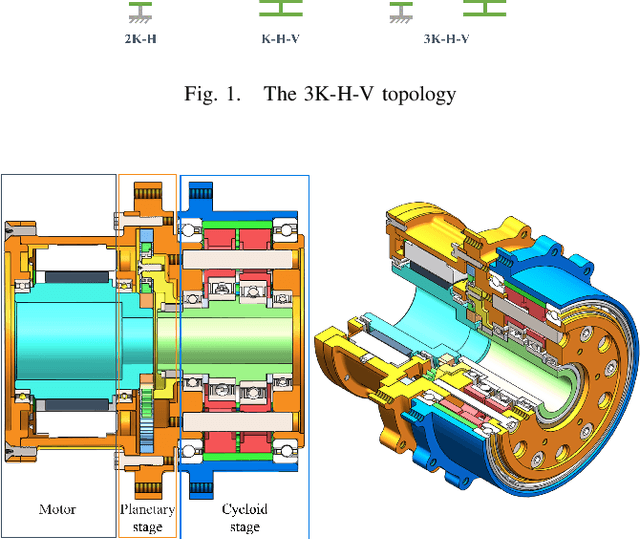
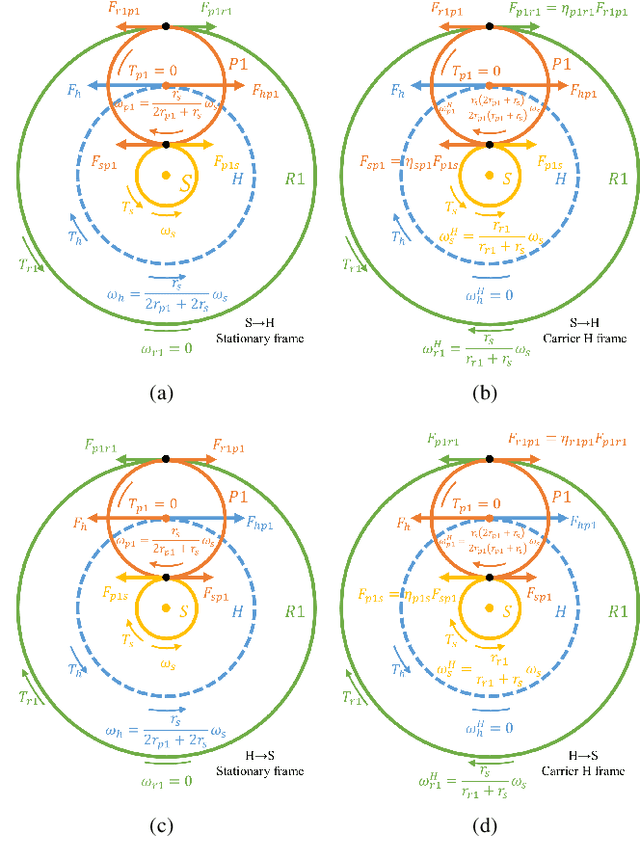
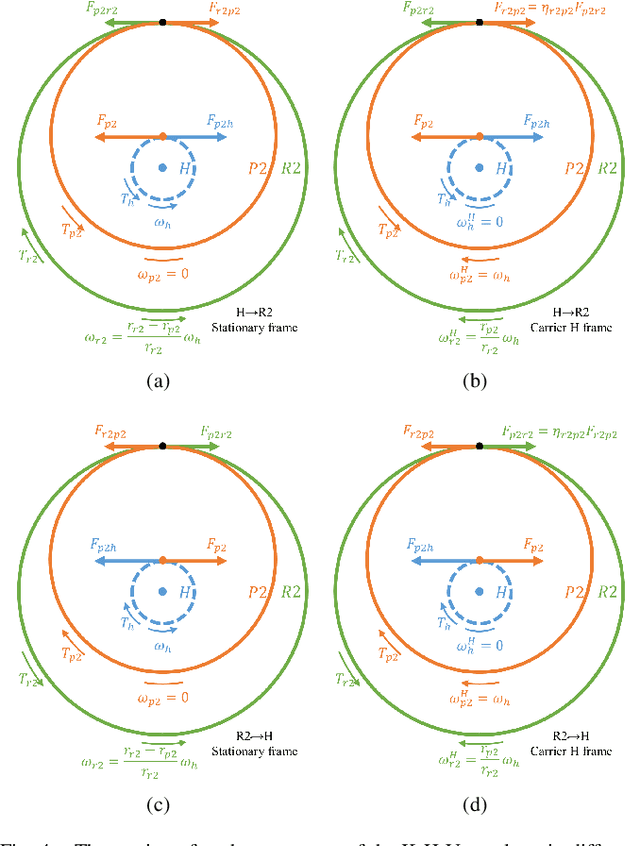
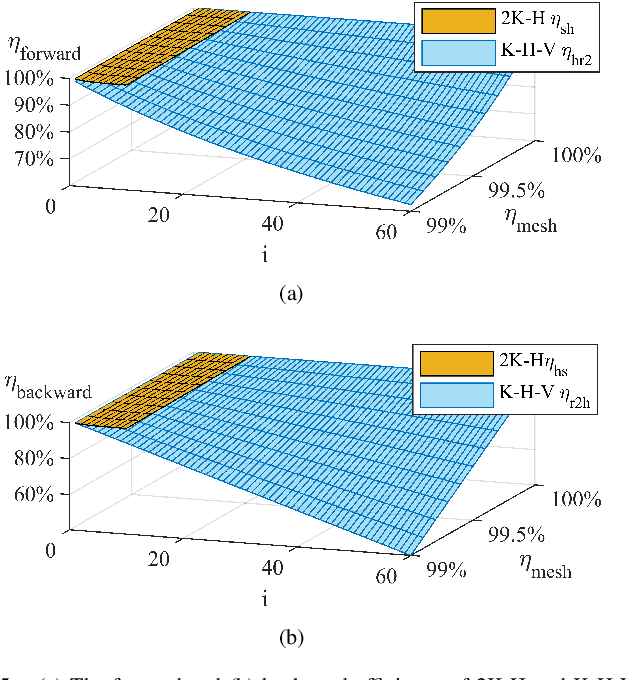
Robot actuators directly affect the performance of robots, and robot drives directly affect the performance of robot actuators. With the development of robotics, robots have put higher requirements on robot drives, such as high stiffness, high accuracy, high loading, high efficiency, low backlash, compact size, and hollow structure. In order to meet the demand development of robot actuators, this research base proposes a new robot drive based on 3K-H-V topology using involute and cycloidal gear shapes, planetary cycloidal drive, from the perspective of drive topology and through the design idea of decoupling. In this study, the reduction ratio and the efficiency model of the 3K-H-V topology were analyzed, and a prototype planetary cycloidal actuator was designed. The feasibility of the drive is initially verified by experimentally concluding that the PCA has a hollow structure, compact size, and high torque density (69 kg/Nm).