 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePetLock:A Genderless and Standard Interface for the Future On-orbit Construction
Paper and Code
Sep 09, 2022

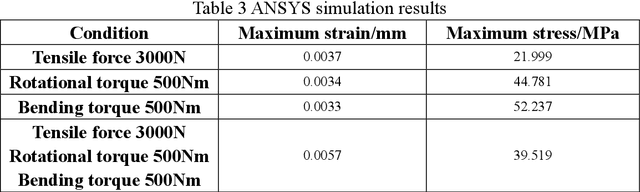
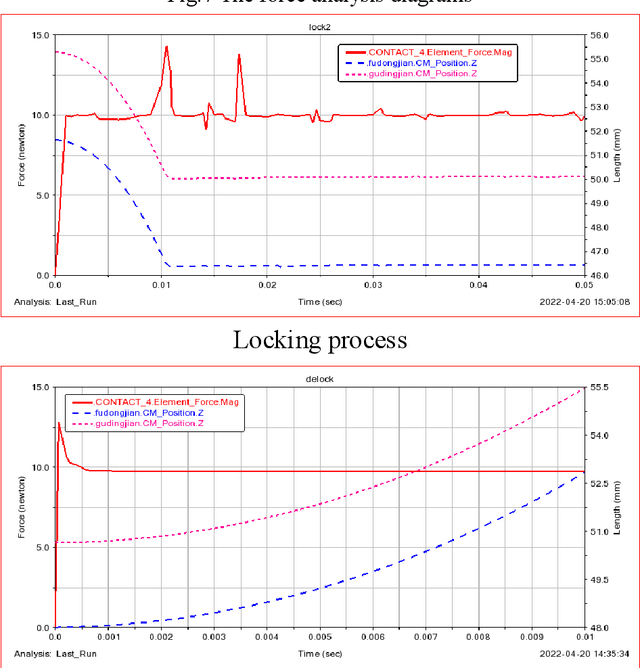
Modular design is the foundation of on orbit construction technology of large space facilities in the future.Standard interface is the key technology of modular design of the future space robotic systems and space facilities.This paper presents the designed and tested of PetLock,a standard and genderless interface which can transfer mechanical loads,power and data between the future modular space robotic manipulator and spacecraft.PetLock adopts a completely genderless design,including connection face,locking mechanism,data and power interface.The connection surface provides a large translation and rotation misalignment tolerance,due to its 120-degree symmetrical and 3D shape design.The locking mechanism features the three locking pins retraction structure design,which is simple and reliable.POGO pin connectors in the center of the interface provides the power and data transfer capabilities.Due to the advantages of high locking force,large tolerance,high reliability and low cost,PetLock has the very big application potential in future on orbit construction missions.