 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision-Free Kinematics for Redundant Manipulators in Dynamic Scenes using Optimal Reciprocal Velocity Obstacles
Paper and Code
Mar 09, 2019
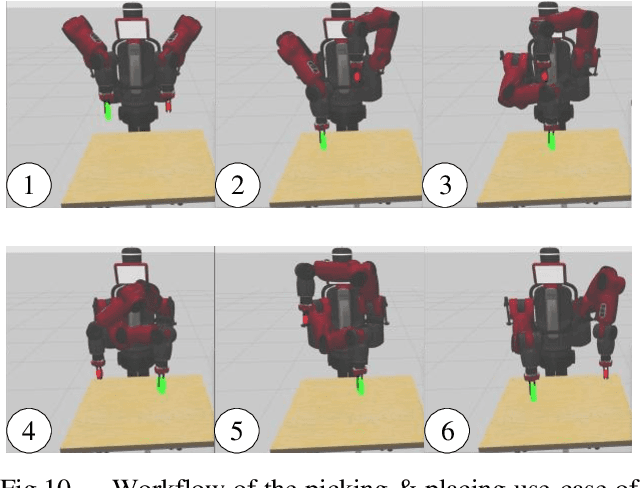
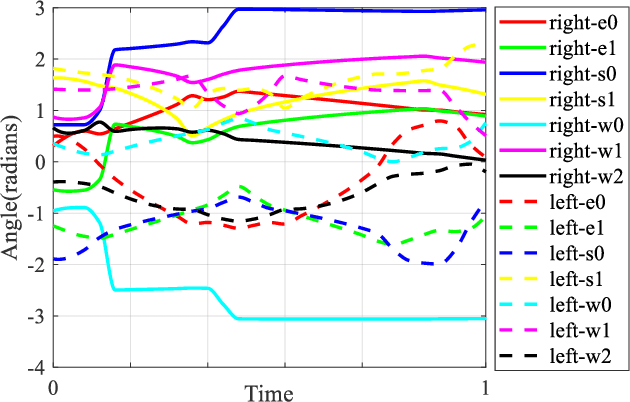
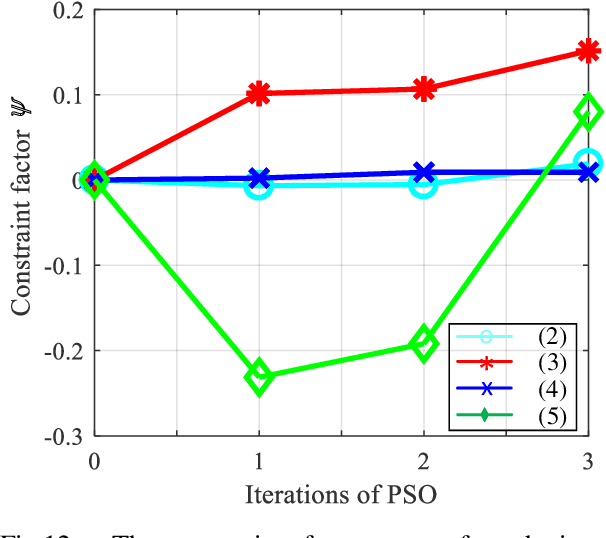
We present a novel algorithm for collision-free kinematics of multiple manipulators in a shared workspace with moving obstacles. Our optimization-based approach simultaneously handles collision-free constraints based on reciprocal velocity obstacles and inverse kinematics constraints for high-DOF manipulators. We present an efficient method based on particle swarm optimization that can generate collision-free configurations for each redundant manipulator. Furthermore, our approach can be used to compute safe and oscillation-free trajectories in a few milli-seconds. We highlight the real-time performance of our algorithm on multiple Baxter robots with 14-DOF manipulators operating in a workspace with dynamic obstacles. Videos are available at https://sites.google.com/view/collision-free-kinematics