 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Foundation Model on Temporal Knowledge Graph Reasoning
Jun 04, 2025Temporal Knowledge Graphs (TKGs) store temporal facts with quadruple formats (s, p, o, t). Existing Temporal Knowledge Graph Embedding (TKGE) models perform link prediction tasks in transductive or semi-inductive settings, which means the entities, relations, and temporal information in the test graph are fully or partially observed during training. Such reliance on seen elements during inference limits the models' ability to transfer to new domains and generalize to real-world scenarios. A central limitation is the difficulty in learning representations for entities, relations, and timestamps that are transferable and not tied to dataset-specific vocabularies. To overcome these limitations, we introduce the first fully-inductive approach to temporal knowledge graph link prediction. Our model employs sinusoidal positional encodings to capture fine-grained temporal patterns and generates adaptive entity and relation representations using message passing conditioned on both local and global temporal contexts. Our model design is agnostic to temporal granularity and time span, effectively addressing temporal discrepancies across TKGs and facilitating time-aware structural information transfer. As a pretrained, scalable, and transferable model, POSTRA demonstrates strong zero-shot performance on unseen temporal knowledge graphs, effectively generalizing to novel entities, relations, and timestamps. Extensive theoretical analysis and empirical results show that a single pretrained model can improve zero-shot performance on various inductive temporal reasoning scenarios, marking a significant step toward a foundation model for temporal KGs.
Enriching Ontologies with Disjointness Axioms using Large Language Models
Oct 04, 2024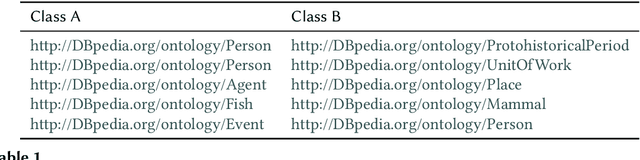
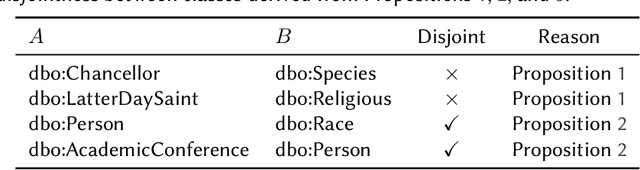
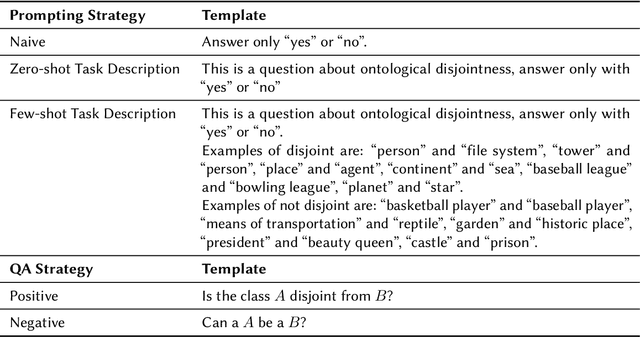
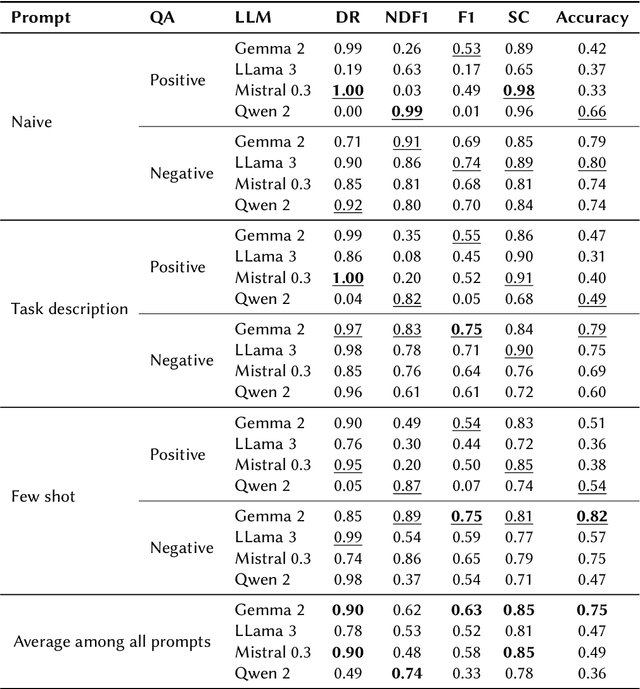
Ontologies often lack explicit disjointness declarations between classes, despite their usefulness for sophisticated reasoning and consistency checking in Knowledge Graphs. In this study, we explore the potential of Large Language Models (LLMs) to enrich ontologies by identifying and asserting class disjointness axioms. Our approach aims at leveraging the implicit knowledge embedded in LLMs, using prompt engineering to elicit this knowledge for classifying ontological disjointness. We validate our methodology on the DBpedia ontology, focusing on open-source LLMs. Our findings suggest that LLMs, when guided by effective prompt strategies, can reliably identify disjoint class relationships, thus streamlining the process of ontology completion without extensive manual input. For comprehensive disjointness enrichment, we propose a process that takes logical relationships between disjointness and subclass statements into account in order to maintain satisfiability and reduce the number of calls to the LLM. This work provides a foundation for future applications of LLMs in automated ontology enhancement and offers insights into optimizing LLM performance through strategic prompt design. Our code is publicly available on GitHub at https://github.com/n28div/llm-disjointness.
HGE: Embedding Temporal Knowledge Graphs in a Product Space of Heterogeneous Geometric Subspaces
Dec 25, 2023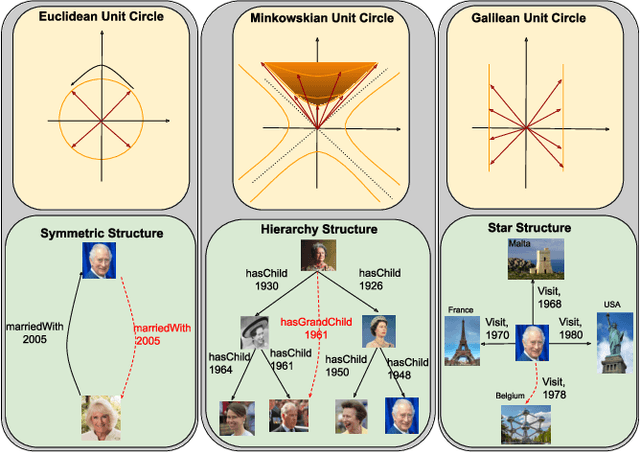

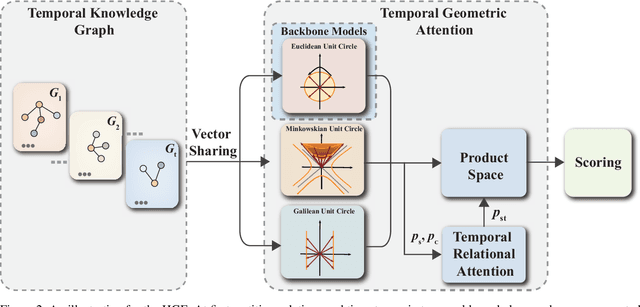

Temporal knowledge graphs represent temporal facts $(s,p,o,\tau)$ relating a subject $s$ and an object $o$ via a relation label $p$ at time $\tau$, where $\tau$ could be a time point or time interval. Temporal knowledge graphs may exhibit static temporal patterns at distinct points in time and dynamic temporal patterns between different timestamps. In order to learn a rich set of static and dynamic temporal patterns and apply them for inference, several embedding approaches have been suggested in the literature. However, as most of them resort to single underlying embedding spaces, their capability to model all kinds of temporal patterns was severely limited by having to adhere to the geometric property of their one embedding space. We lift this limitation by an embedding approach that maps temporal facts into a product space of several heterogeneous geometric subspaces with distinct geometric properties, i.e.\ Complex, Dual, and Split-complex spaces. In addition, we propose a temporal-geometric attention mechanism to integrate information from different geometric subspaces conveniently according to the captured relational and temporal information. Experimental results on standard temporal benchmark datasets favorably evaluate our approach against state-of-the-art models.
Robust Autonomous Vehicle Pursuit without Expert Steering Labels
Aug 16, 2023In this work, we present a learning method for lateral and longitudinal motion control of an ego-vehicle for vehicle pursuit. The car being controlled does not have a pre-defined route, rather it reactively adapts to follow a target vehicle while maintaining a safety distance. To train our model, we do not rely on steering labels recorded from an expert driver but effectively leverage a classical controller as an offline label generation tool. In addition, we account for the errors in the predicted control values, which can lead to a loss of tracking and catastrophic crashes of the controlled vehicle. To this end, we propose an effective data augmentation approach, which allows to train a network capable of handling different views of the target vehicle. During the pursuit, the target vehicle is firstly localized using a Convolutional Neural Network. The network takes a single RGB image along with cars' velocities and estimates the target vehicle's pose with respect to the ego-vehicle. This information is then fed to a Multi-Layer Perceptron, which regresses the control commands for the ego-vehicle, namely throttle and steering angle. We extensively validate our approach using the CARLA simulator on a wide range of terrains. Our method demonstrates real-time performance and robustness to different scenarios including unseen trajectories and high route completion. The project page containing code and multimedia can be publicly accessed here: https://changyaozhou.github.io/Autonomous-Vehicle-Pursuit/.
Mention-centered Graph Neural Network for Document-level Relation Extraction
Mar 15, 2021


Document-level relation extraction aims to discover relations between entities across a whole document. How to build the dependency of entities from different sentences in a document remains to be a great challenge. Current approaches either leverage syntactic trees to construct document-level graphs or aggregate inference information from different sentences. In this paper, we build cross-sentence dependencies by inferring compositional relations between inter-sentence mentions. Adopting aggressive linking strategy, intermediate relations are reasoned on the document-level graphs by mention convolution. We further notice the generalization problem of NA instances, which is caused by incomplete annotation and worsened by fully-connected mention pairs. An improved ranking loss is proposed to attend this problem. Experiments show the connections between different mentions are crucial to document-level relation extraction, which enables the model to extract more meaningful higher-level compositional relations.
RDSGAN: Rank-based Distant Supervision Relation Extraction with Generative Adversarial Framework
Sep 30, 2020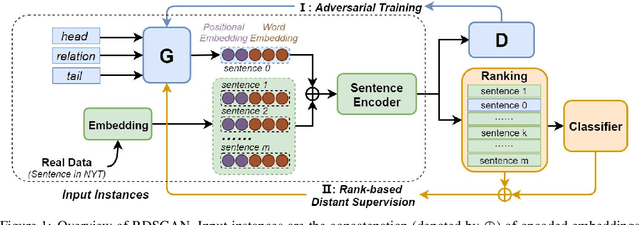
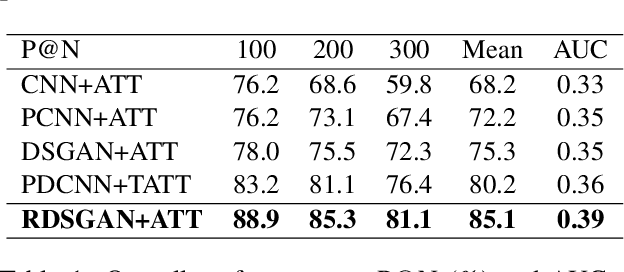
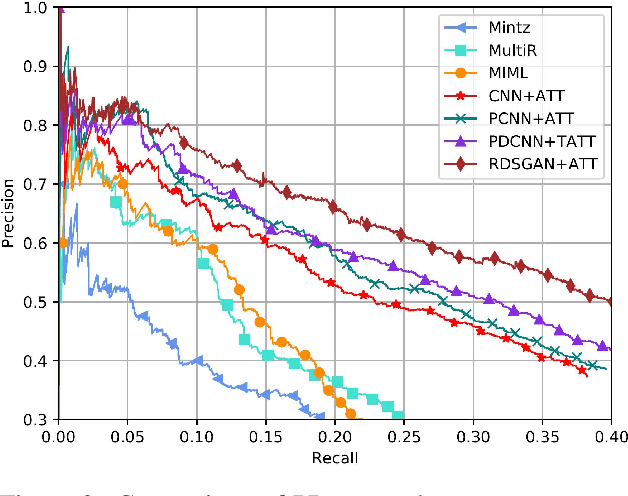
Distant supervision has been widely used for relation extraction but suffers from noise labeling problem. Neural network models are proposed to denoise with attention mechanism but cannot eliminate noisy data due to its non-zero weights. Hard decision is proposed to remove wrongly-labeled instances from the positive set though causes loss of useful information contained in removed instances. In this paper, we propose a novel generative neural framework named RDSGAN (Rank-based Distant Supervision GAN) which automatically generates valid instances for distant supervision relation extraction. Our framework combines soft attention and hard decision to learn the distribution of true positive instances via adversarial training and selects valid instances conforming to the distribution via rank-based distant supervision, which addresses the false positive problem. Experimental results show the superiority of our framework over strong baselines.