 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStop Overthinking: A Survey on Efficient Reasoning for Large Language Models
Mar 20, 2025Large Language Models (LLMs) have demonstrated remarkable capabilities in complex tasks. Recent advancements in Large Reasoning Models (LRMs), such as OpenAI o1 and DeepSeek-R1, have further improved performance in System-2 reasoning domains like mathematics and programming by harnessing supervised fine-tuning (SFT) and reinforcement learning (RL) techniques to enhance the Chain-of-Thought (CoT) reasoning. However, while longer CoT reasoning sequences improve performance, they also introduce significant computational overhead due to verbose and redundant outputs, known as the "overthinking phenomenon". In this paper, we provide the first structured survey to systematically investigate and explore the current progress toward achieving efficient reasoning in LLMs. Overall, relying on the inherent mechanism of LLMs, we categorize existing works into several key directions: (1) model-based efficient reasoning, which considers optimizing full-length reasoning models into more concise reasoning models or directly training efficient reasoning models; (2) reasoning output-based efficient reasoning, which aims to dynamically reduce reasoning steps and length during inference; (3) input prompts-based efficient reasoning, which seeks to enhance reasoning efficiency based on input prompt properties such as difficulty or length control. Additionally, we introduce the use of efficient data for training reasoning models, explore the reasoning capabilities of small language models, and discuss evaluation methods and benchmarking.
Decentralized Vehicle Coordination: The Berkeley DeepDrive Drone Dataset
Sep 22, 2022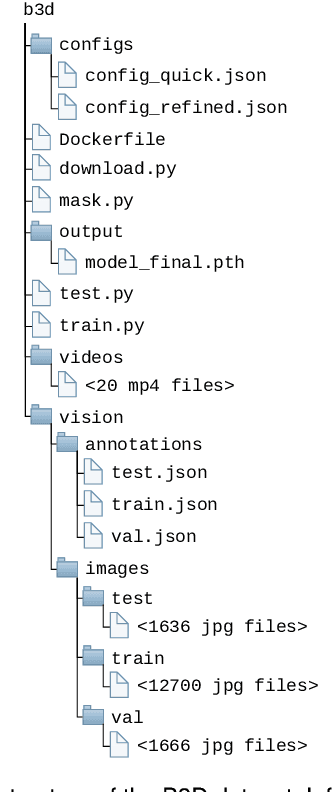
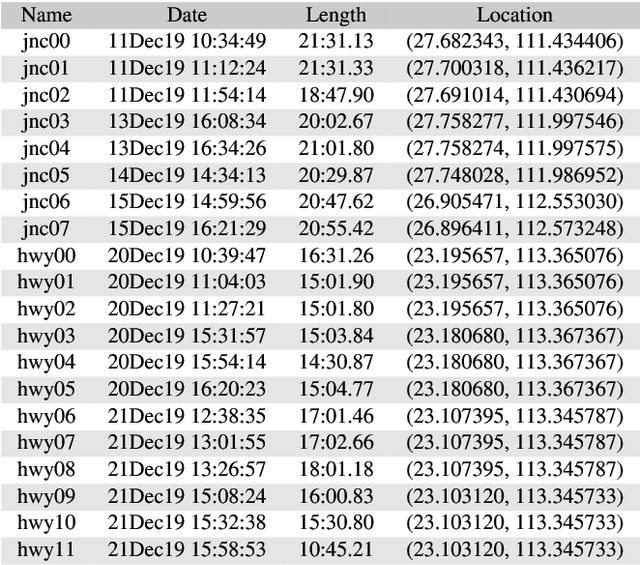
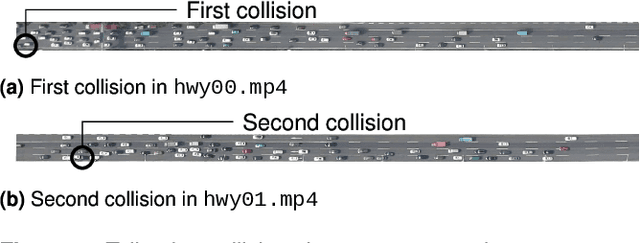
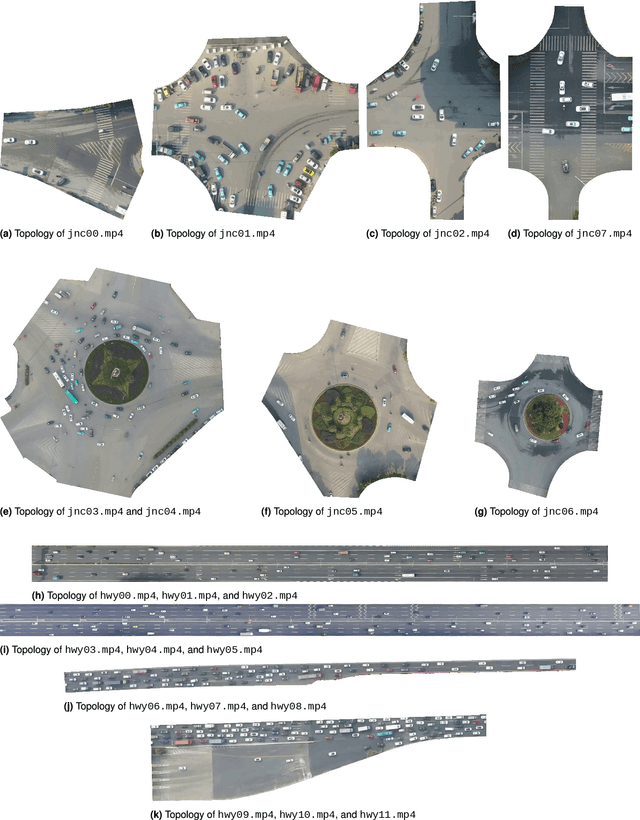
Decentralized multiagent planning has been an important field of research in robotics. An interesting and impactful application in the field is decentralized vehicle coordination in understructured road environments. For example, in an intersection, it is useful yet difficult to deconflict multiple vehicles of intersecting paths in absence of a central coordinator. We learn from common sense that, for a vehicle to navigate through such understructured environments, the driver must understand and conform to the implicit "social etiquette" observed by nearby drivers. To study this implicit driving protocol, we collect the Berkeley DeepDrive Drone dataset. The dataset contains 1) a set of aerial videos recording understructured driving, 2) a collection of images and annotations to train vehicle detection models, and 3) a kit of development scripts for illustrating typical usages. We believe that the dataset is of primary interest for studying decentralized multiagent planning employed by human drivers and, of secondary interest, for computer vision in remote sensing settings.