 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Vehicle Coordination: The Berkeley DeepDrive Drone Dataset
Paper and Code
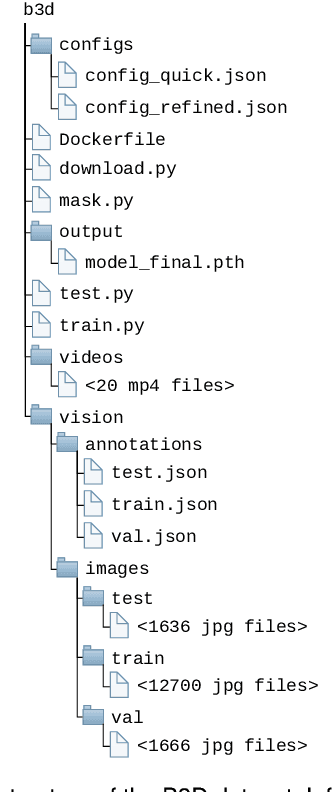
Decentralized multiagent planning has been an important field of research in robotics. An interesting and impactful application in the field is decentralized vehicle coordination in understructured road environments. For example, in an intersection, it is useful yet difficult to deconflict multiple vehicles of intersecting paths in absence of a central coordinator. We learn from common sense that, for a vehicle to navigate through such understructured environments, the driver must understand and conform to the implicit "social etiquette" observed by nearby drivers. To study this implicit driving protocol, we collect the Berkeley DeepDrive Drone dataset. The dataset contains 1) a set of aerial videos recording understructured driving, 2) a collection of images and annotations to train vehicle detection models, and 3) a kit of development scripts for illustrating typical usages. We believe that the dataset is of primary interest for studying decentralized multiagent planning employed by human drivers and, of secondary interest, for computer vision in remote sensing settings.