 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolicy Contrastive Imitation Learning
Jul 06, 2023



Adversarial imitation learning (AIL) is a popular method that has recently achieved much success. However, the performance of AIL is still unsatisfactory on the more challenging tasks. We find that one of the major reasons is due to the low quality of AIL discriminator representation. Since the AIL discriminator is trained via binary classification that does not necessarily discriminate the policy from the expert in a meaningful way, the resulting reward might not be meaningful either. We propose a new method called Policy Contrastive Imitation Learning (PCIL) to resolve this issue. PCIL learns a contrastive representation space by anchoring on different policies and generates a smooth cosine-similarity-based reward. Our proposed representation learning objective can be viewed as a stronger version of the AIL objective and provide a more meaningful comparison between the agent and the policy. From a theoretical perspective, we show the validity of our method using the apprenticeship learning framework. Furthermore, our empirical evaluation on the DeepMind Control suite demonstrates that PCIL can achieve state-of-the-art performance. Finally, qualitative results suggest that PCIL builds a smoother and more meaningful representation space for imitation learning.
An Empirical Study on Disentanglement of Negative-free Contrastive Learning
Jun 09, 2022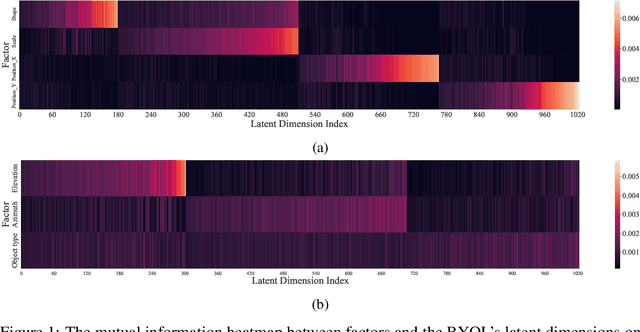

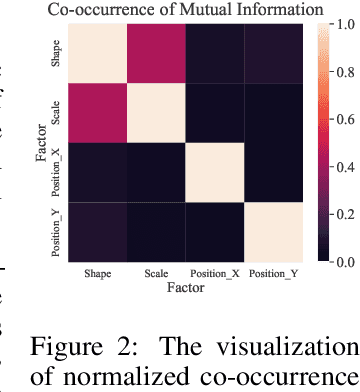

Negative-free contrastive learning has attracted a lot of attention with simplicity and impressive performance for large-scale pretraining. But its disentanglement property remains unexplored. In this paper, we take different negative-free contrastive learning methods to study the disentanglement property of this genre of self-supervised methods empirically. We find the existing disentanglement metrics fail to make meaningful measurements for the high-dimensional representation model so we propose a new disentanglement metric based on Mutual Information between representation and data factors. With the proposed metric, we benchmark the disentanglement property of negative-free contrastive learning for the first time, on both popular synthetic datasets and a real-world dataset CelebA. Our study shows that the investigated methods can learn a well-disentangled subset of representation. We extend the study of the disentangled representation learning to high-dimensional representation space and negative-free contrastive learning for the first time. The implementation of the proposed metric is available at \url{https://github.com/noahcao/disentanglement_lib_med}.
Generative 3D Part Assembly via Dynamic Graph Learning
Jun 14, 2020



Autonomous part assembly is a challenging yet crucial task in 3D computer vision and robotics. Analogous to buying an IKEA furniture, given a set of 3D parts that can assemble a single shape, an intelligent agent needs to perceive the 3D part geometry, reason to propose pose estimations for the input parts, and finally call robotic planning and control routines for actuation. In this paper, we focus on the pose estimation subproblem from the vision side involving geometric and relational reasoning over the input part geometry. Essentially, the task of generative 3D part assembly is to predict a 6-DoF part pose, including a rigid rotation and translation, for each input part that assembles a single 3D shape as the final output. To tackle this problem, we propose an assembly-oriented dynamic graph learning framework that leverages an iterative graph neural network as a backbone. It explicitly conducts sequential part assembly refinements in a coarse-to-fine manner, exploits a pair of part relation reasoning module and part aggregation module for dynamically adjusting both part features and their relations in the part graph. We conduct extensive experiments and quantitative comparisons to three strong baseline methods, demonstrating the effectiveness of the proposed approach.