 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOperationalizing Assurance Cases for Data Scientists: A Showcase of Concepts and Tooling in the Context of Test Data Quality for Machine Learning
Dec 08, 2023Assurance Cases (ACs) are an established approach in safety engineering to argue quality claims in a structured way. In the context of quality assurance for Machine Learning (ML)-based software components, ACs are also being discussed and appear promising. Tools for operationalizing ACs do exist, yet mainly focus on supporting safety engineers on the system level. However, assuring the quality of an ML component within the system is commonly the responsibility of data scientists, who are usually less familiar with these tools. To address this gap, we propose a framework to support the operationalization of ACs for ML components based on technologies that data scientists use on a daily basis: Python and Jupyter Notebook. Our aim is to make the process of creating ML-related evidence in ACs more effective. Results from the application of the framework, documented through notebooks, can be integrated into existing AC tools. We illustrate the application of the framework on an example excerpt concerned with the quality of the test data.
Timeseries-aware Uncertainty Wrappers for Uncertainty Quantification of Information-Fusion-Enhanced AI Models based on Machine Learning
May 24, 2023
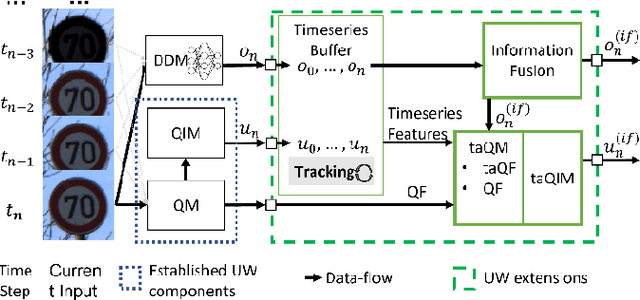

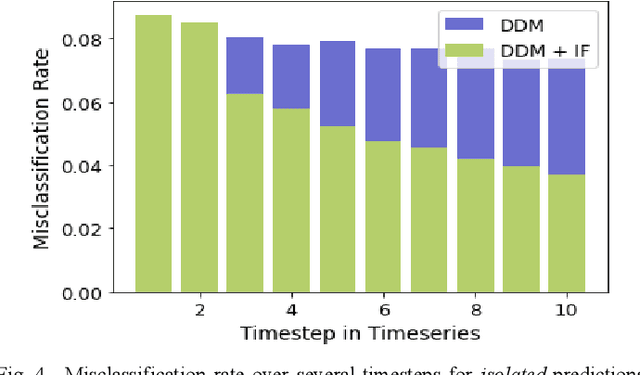
As the use of Artificial Intelligence (AI) components in cyber-physical systems is becoming more common, the need for reliable system architectures arises. While data-driven models excel at perception tasks, model outcomes are usually not dependable enough for safety-critical applications. In this work,we present a timeseries-aware uncertainty wrapper for dependable uncertainty estimates on timeseries data. The uncertainty wrapper is applied in combination with information fusion over successive model predictions in time. The application of the uncertainty wrapper is demonstrated with a traffic sign recognition use case. We show that it is possible to increase model accuracy through information fusion and additionally increase the quality of uncertainty estimates through timeseries-aware input quality features.
Architectural patterns for handling runtime uncertainty of data-driven models in safety-critical perception
Jun 14, 2022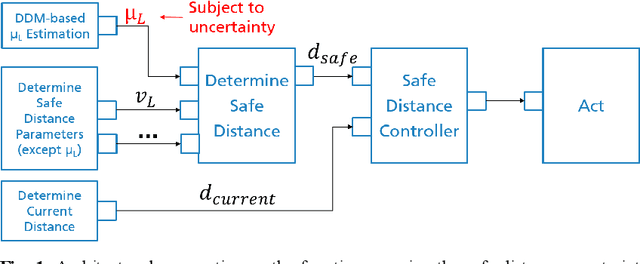
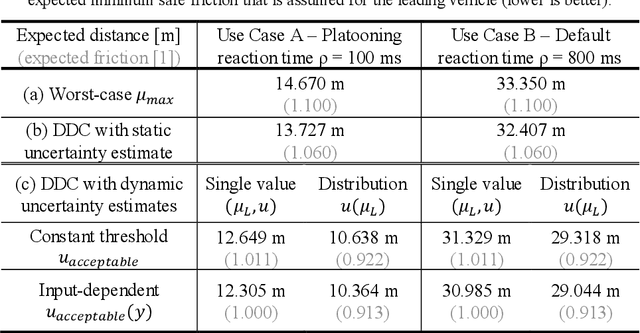
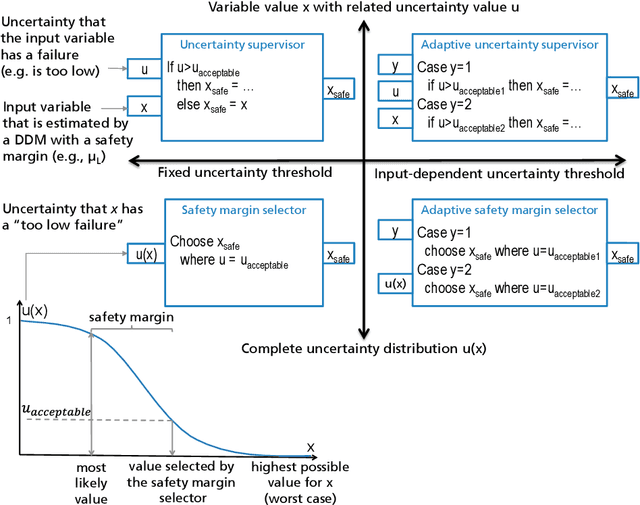
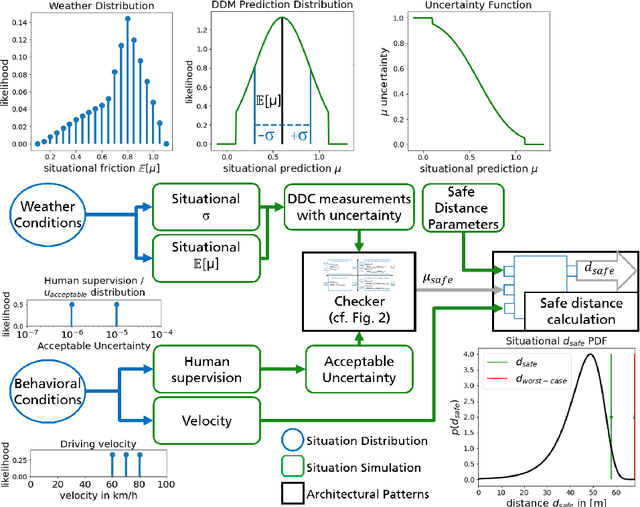
Data-driven models (DDM) based on machine learning and other AI techniques play an important role in the perception of increasingly autonomous systems. Due to the merely implicit definition of their behavior mainly based on the data used for training, DDM outputs are subject to uncertainty. This poses a challenge with respect to the realization of safety-critical perception tasks by means of DDMs. A promising approach to tackling this challenge is to estimate the uncertainty in the current situation during operation and adapt the system behavior accordingly. In previous work, we focused on runtime estimation of uncertainty and discussed approaches for handling uncertainty estimations. In this paper, we present additional architectural patterns for handling uncertainty. Furthermore, we evaluate the four patterns qualitatively and quantitatively with respect to safety and performance gains. For the quantitative evaluation, we consider a distance controller for vehicle platooning where performance gains are measured by considering how much the distance can be reduced in different operational situations. We conclude that the consideration of context information of the driving situation makes it possible to accept more or less uncertainty depending on the inherent risk of the situation, which results in performance gains.
Towards a Common Testing Terminology for Software Engineering and Artificial Intelligence Experts
Sep 06, 2021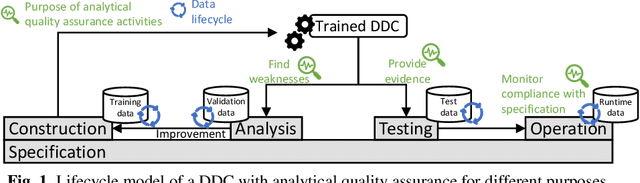
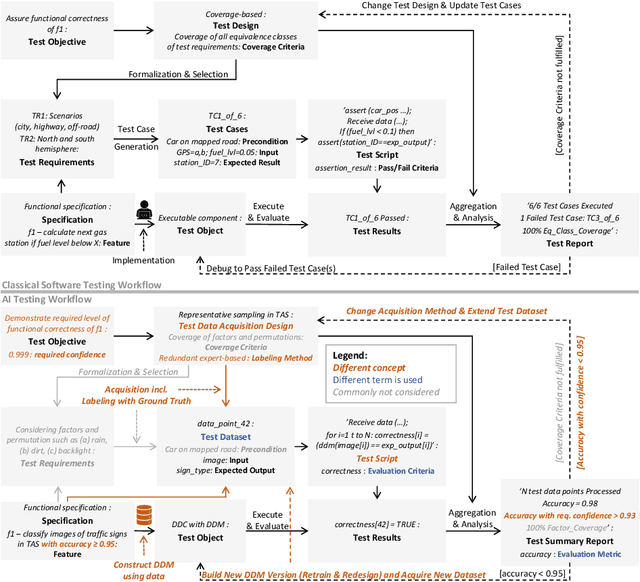
Analytical quality assurance, especially testing, is an integral part of software-intensive system development. With the increased usage of Artificial Intelligence (AI) and Machine Learning (ML) as part of such systems, this becomes more difficult as well-understood software testing approaches cannot be applied directly to the AI-enabled parts of the system. The required adaptation of classical testing approaches and development of new concepts for AI would benefit from a deeper understanding and exchange between AI and software engineering experts. A major obstacle on this way, we see in the different terminologies used in the two communities. As we consider a mutual understanding of the testing terminology as a key, this paper contributes a mapping between the most important concepts from classical software testing and AI testing. In the mapping, we highlight differences in relevance and naming of the mapped concepts.
Directional Message Passing for Molecular Graphs
Mar 06, 2020
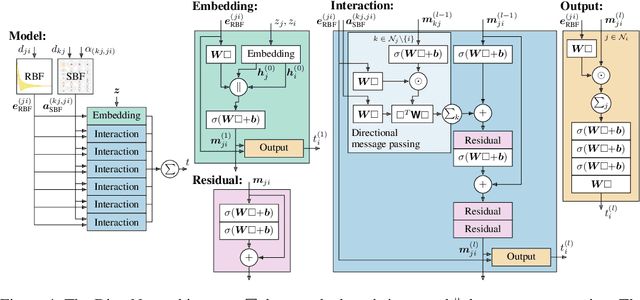
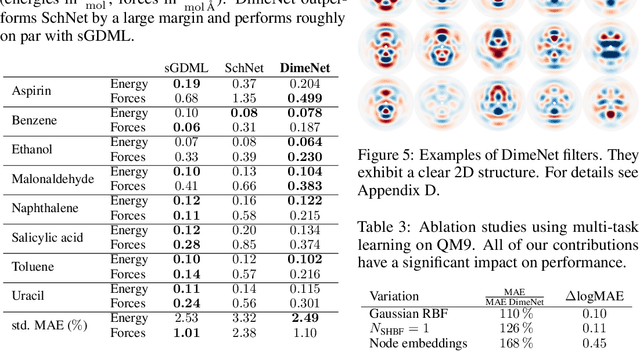
Graph neural networks have recently achieved great successes in predicting quantum mechanical properties of molecules. These models represent a molecule as a graph using only the distance between atoms (nodes). They do not, however, consider the spatial direction from one atom to another, despite directional information playing a central role in empirical potentials for molecules, e.g. in angular potentials. To alleviate this limitation we propose directional message passing, in which we embed the messages passed between atoms instead of the atoms themselves. Each message is associated with a direction in coordinate space. These directional message embeddings are rotationally equivariant since the associated directions rotate with the molecule. We propose a message passing scheme analogous to belief propagation, which uses the directional information by transforming messages based on the angle between them. Additionally, we use spherical Bessel functions and spherical harmonics to construct theoretically well-founded, orthogonal representations that achieve better performance than the currently prevalent Gaussian radial basis representations while using fewer than 1/4 of the parameters. We leverage these innovations to construct the directional message passing neural network (DimeNet). DimeNet outperforms previous GNNs on average by 76% on MD17 and by 31% on QM9. Our implementation is available online.