 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArchitectural patterns for handling runtime uncertainty of data-driven models in safety-critical perception
Paper and Code
Jun 14, 2022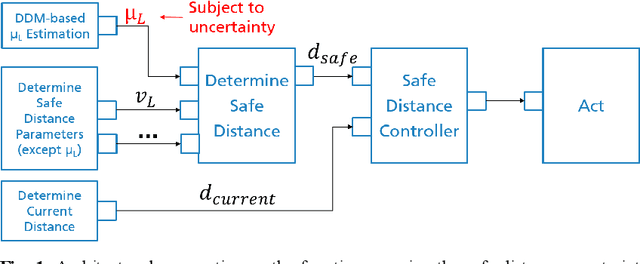
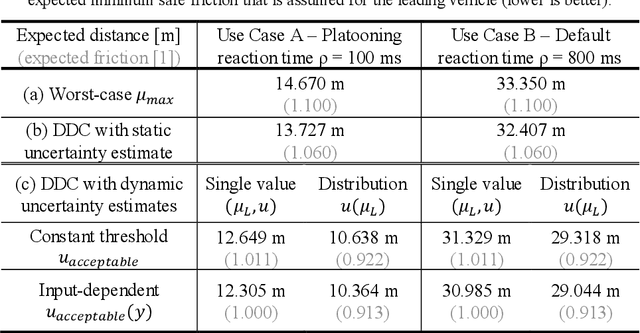
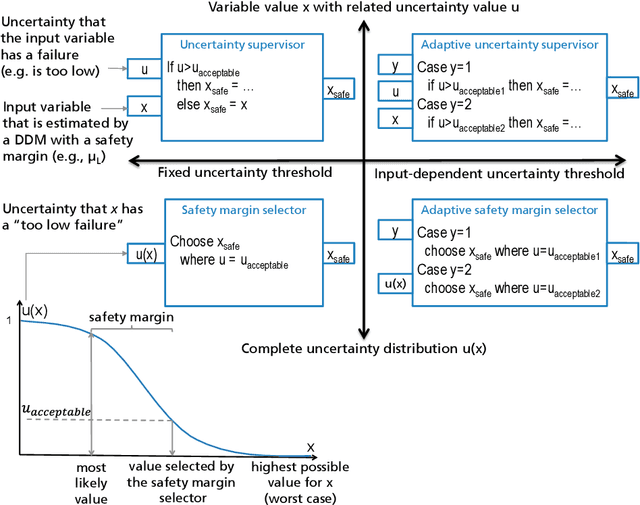
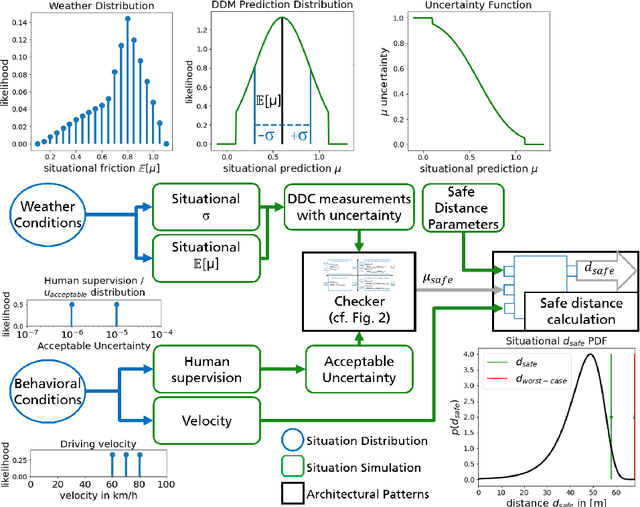
Data-driven models (DDM) based on machine learning and other AI techniques play an important role in the perception of increasingly autonomous systems. Due to the merely implicit definition of their behavior mainly based on the data used for training, DDM outputs are subject to uncertainty. This poses a challenge with respect to the realization of safety-critical perception tasks by means of DDMs. A promising approach to tackling this challenge is to estimate the uncertainty in the current situation during operation and adapt the system behavior accordingly. In previous work, we focused on runtime estimation of uncertainty and discussed approaches for handling uncertainty estimations. In this paper, we present additional architectural patterns for handling uncertainty. Furthermore, we evaluate the four patterns qualitatively and quantitatively with respect to safety and performance gains. For the quantitative evaluation, we consider a distance controller for vehicle platooning where performance gains are measured by considering how much the distance can be reduced in different operational situations. We conclude that the consideration of context information of the driving situation makes it possible to accept more or less uncertainty depending on the inherent risk of the situation, which results in performance gains.