 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepDTF: Dual-Branch Transformer Fusion for Multi-Omics Anticancer Drug Response Prediction
Mar 25, 2026Cancer drug response varies widely across tumors due to multi-layer molecular heterogeneity, motivating computational decision support for precision oncology. Despite recent progress in deep CDR models, robust alignment between high-dimensional multi-omics and chemically structured drugs remains challenging due to cross-modal misalignment and limited inductive bias. We present DeepDTF, an end-to-end dual-branch Transformer fusion framework for joint log(IC50) regression and drug sensitivity classification. The cell-line branch uses modality-specific encoders for multi-omics profiles with Transformer blocks to capture long-range dependencies, while the drug branch represents compounds as molecular graphs and encodes them with a GNN-Transformer to integrate local topology with global context. Omics and drug representations are fused by a Transformer-based module that models cross-modal interactions and mitigates feature misalignment. On public pharmacogenomic benchmarks under 5-fold cold-start cell-line evaluation, DeepDTF consistently outperforms strong baselines across omics settings, achieving up to RMSE=1.248, R^2=0.875, and AUC=0.987 with full multi-omics inputs, while reducing classification error (1-ACC) by 9.5%. Beyond accuracy, DeepDTF provides biologically grounded explanations via SHAP-based gene attributions and pathway enrichment with pre-ranked GSEA.
A Fast and Scalable Pathwise-Solver for Group Lasso and Elastic Net Penalized Regression via Block-Coordinate Descent
May 14, 2024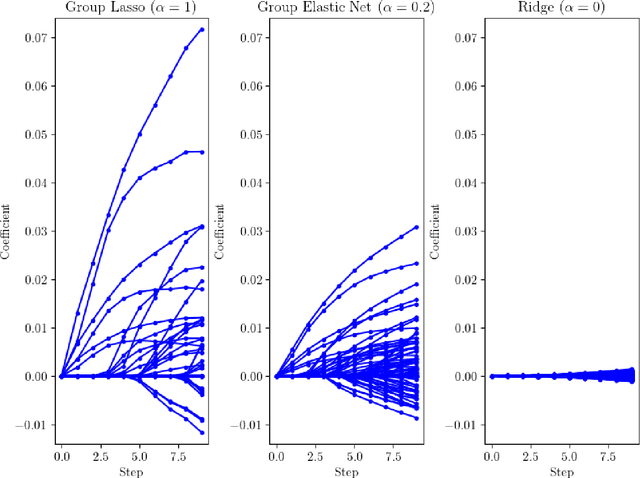
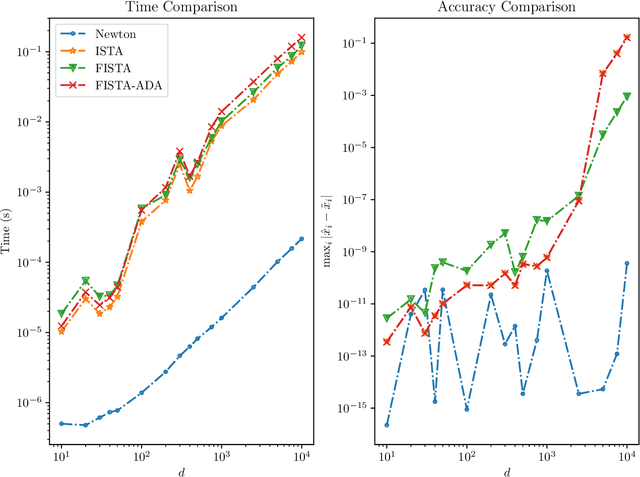
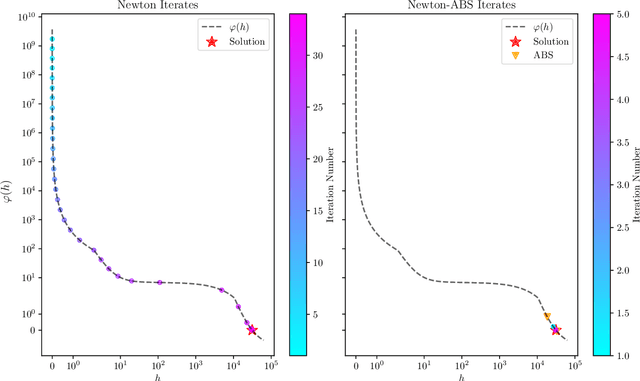
We develop fast and scalable algorithms based on block-coordinate descent to solve the group lasso and the group elastic net for generalized linear models along a regularization path. Special attention is given when the loss is the usual least squares loss (Gaussian loss). We show that each block-coordinate update can be solved efficiently using Newton's method and further improved using an adaptive bisection method, solving these updates with a quadratic convergence rate. Our benchmarks show that our package adelie performs 3 to 10 times faster than the next fastest package on a wide array of both simulated and real datasets. Moreover, we demonstrate that our package is a competitive lasso solver as well, matching the performance of the popular lasso package glmnet.
User Welfare Optimization in Recommender Systems with Competing Content Creators
Apr 28, 2024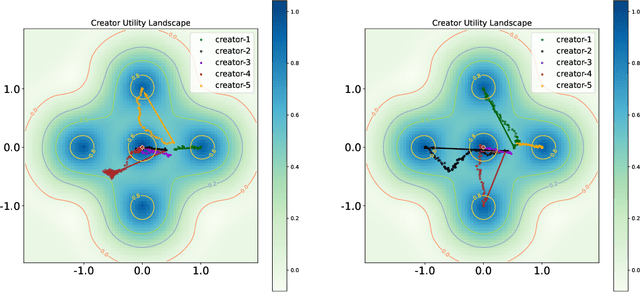

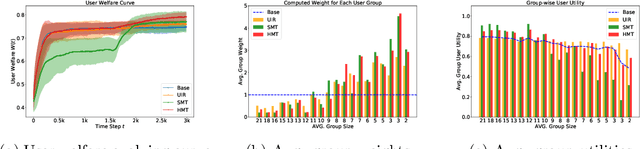

Driven by the new economic opportunities created by the creator economy, an increasing number of content creators rely on and compete for revenue generated from online content recommendation platforms. This burgeoning competition reshapes the dynamics of content distribution and profoundly impacts long-term user welfare on the platform. However, the absence of a comprehensive picture of global user preference distribution often traps the competition, especially the creators, in states that yield sub-optimal user welfare. To encourage creators to best serve a broad user population with relevant content, it becomes the platform's responsibility to leverage its information advantage regarding user preference distribution to accurately signal creators. In this study, we perform system-side user welfare optimization under a competitive game setting among content creators. We propose an algorithmic solution for the platform, which dynamically computes a sequence of weights for each user based on their satisfaction of the recommended content. These weights are then utilized to design mechanisms that adjust the recommendation policy or the post-recommendation rewards, thereby influencing creators' content production strategies. To validate the effectiveness of our proposed method, we report our findings from a series of experiments, including: 1. a proof-of-concept negative example illustrating how creators' strategies converge towards sub-optimal states without platform intervention; 2. offline experiments employing our proposed intervention mechanisms on diverse datasets; and 3. results from a three-week online experiment conducted on a leading short-video recommendation platform.
Manta Ray Inspired Flapping-Wing Blimp
Oct 16, 2023Lighter-than-air vehicles or blimps, are an evolving platform in robotics with several beneficial properties such as energy efficiency, collision resistance, and ability to work in close proximity to human users. While existing blimp designs have mainly used propeller-based propulsion, we focus our attention to an alternate locomotion method, flapping wings. Specifically, this paper introduces a flapping-wing blimp inspired by manta rays, in contrast to existing research on flapping-wing vehicles that draw inspiration from insects or birds. We present the overall design and control scheme of the blimp as well as the analysis on how the wing performs. The effects of wing shape and flapping characteristics on the thrust generation are studied experimentally. We also demonstrate that the flapping-wing blimp has a significant range advantage over a propeller-based system.
Lighter-Than-Air Autonomous Ball Capture and Scoring Robot -- Design, Development, and Deployment
Sep 12, 2023This paper describes the full end-to-end design of our primary scoring agent in an aerial autonomous robotics competition from April 2023. As open-ended robotics competitions become more popular, we wish to begin documenting successful team designs and approaches. The intended audience of this paper is not only any future or potential participant in this particular national Defend The Republic (DTR) competition, but rather anyone thinking about designing their first robot or system to be entered in a competition with clear goals. Future DTR participants can and should either build on the ideas here, or find new alternate strategies that can defeat the most successful design last time. For non-DTR participants but students interested in robotics competitions, identifying the minimum viable system needed to be competitive is still important in helping manage time and prioritizing tasks that are crucial to competition success first.