 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInsTraj: Instructing Diffusion Models with Travel Intentions to Generate Real-world Trajectories
Apr 05, 2026The generation of realistic and controllable GPS trajectories is a fundamental task for applications in urban planning, mobility simulation, and privacy-preserving data sharing. However, existing methods face a two-fold challenge: they lack the deep semantic understanding to interpret complex user travel intent, and struggle to handle complex constraints while maintaining the realistic diversity inherent in human behavior. To resolve this, we introduce InsTraj, a novel framework that instructs diffusion models to generate high-fidelity trajectories directly from natural language descriptions. Specifically, InsTraj first utilizes a powerful large language model to decipher unstructured travel intentions formed in natural language, thereby creating rich semantic blueprints and bridging the representation gap between intentions and trajectories. Subsequently, we proposed a multimodal trajectory diffusion transformer that can integrate semantic guidance to generate high-fidelity and instruction-faithful trajectories that adhere to fine-grained user intent. Comprehensive experiments on real-world datasets demonstrate that InsTraj significantly outperforms state-of-the-art methods in generating trajectories that are realistic, diverse, and semantically faithful to the input instructions.
Boosting Fine-Grained Urban Flow Inference via Lightweight Architecture and Focalized Optimization
Nov 10, 2025Fine-grained urban flow inference is crucial for urban planning and intelligent transportation systems, enabling precise traffic management and resource allocation. However, the practical deployment of existing methods is hindered by two key challenges: the prohibitive computational cost of over-parameterized models and the suboptimal performance of conventional loss functions on the highly skewed distribution of urban flows. To address these challenges, we propose a unified solution that synergizes architectural efficiency with adaptive optimization. Specifically, we first introduce PLGF, a lightweight yet powerful architecture that employs a Progressive Local-Global Fusion strategy to effectively capture both fine-grained details and global contextual dependencies. Second, we propose DualFocal Loss, a novel function that integrates dual-space supervision with a difficulty-aware focusing mechanism, enabling the model to adaptively concentrate on hard-to-predict regions. Extensive experiments on 4 real-world scenarios validate the effectiveness and scalability of our method. Notably, while achieving state-of-the-art performance, PLGF reduces the model size by up to 97% compared to current high-performing methods. Furthermore, under comparable parameter budgets, our model yields an accuracy improvement of over 10% against strong baselines. The implementation is included in the https://github.com/Yasoz/PLGF.
Edge Collaborative Gaussian Splatting with Integrated Rendering and Communication
Oct 26, 2025Gaussian splatting (GS) struggles with degraded rendering quality on low-cost devices. To address this issue, we present edge collaborative GS (ECO-GS), where each user can switch between a local small GS model to guarantee timeliness and a remote large GS model to guarantee fidelity. However, deciding how to engage the large GS model is nontrivial, due to the interdependency between rendering requirements and resource conditions. To this end, we propose integrated rendering and communication (IRAC), which jointly optimizes collaboration status (i.e., deciding whether to engage large GS) and edge power allocation (i.e., enabling remote rendering) under communication constraints across different users by minimizing a newly-derived GS switching function. Despite the nonconvexity of the problem, we propose an efficient penalty majorization minimization (PMM) algorithm to obtain the critical point solution. Furthermore, we develop an imitation learning optimization (ILO) algorithm, which reduces the computational time by over 100x compared to PMM. Experiments demonstrate the superiority of PMM and the real-time execution capability of ILO.
Learning Generalized and Flexible Trajectory Models from Omni-Semantic Supervision
May 23, 2025The widespread adoption of mobile devices and data collection technologies has led to an exponential increase in trajectory data, presenting significant challenges in spatio-temporal data mining, particularly for efficient and accurate trajectory retrieval. However, existing methods for trajectory retrieval face notable limitations, including inefficiencies in large-scale data, lack of support for condition-based queries, and reliance on trajectory similarity measures. To address the above challenges, we propose OmniTraj, a generalized and flexible omni-semantic trajectory retrieval framework that integrates four complementary modalities or semantics -- raw trajectories, topology, road segments, and regions -- into a unified system. Unlike traditional approaches that are limited to computing and processing trajectories as a single modality, OmniTraj designs dedicated encoders for each modality, which are embedded and fused into a shared representation space. This design enables OmniTraj to support accurate and flexible queries based on any individual modality or combination thereof, overcoming the rigidity of traditional similarity-based methods. Extensive experiments on two real-world datasets demonstrate the effectiveness of OmniTraj in handling large-scale data, providing flexible, multi-modality queries, and supporting downstream tasks and applications.
UniTraj: Universal Human Trajectory Modeling from Billion-Scale Worldwide Traces
Nov 06, 2024Human trajectory modeling is essential for deciphering movement patterns and supporting advanced applications across various domains. However, existing methods are often tailored to specific tasks and regions, resulting in limitations related to task specificity, regional dependency, and data quality sensitivity. Addressing these challenges requires a universal human trajectory foundation model capable of generalizing and scaling across diverse tasks and geographic contexts. To this end, we propose UniTraj, a Universal human Trajectory foundation model that is task-adaptive, region-independent, and highly generalizable. To further enhance performance, we construct WorldTrace, the first large-scale, high-quality, globally distributed dataset sourced from open web platforms, encompassing 2.45 million trajectories with billions of points across 70 countries. Through multiple resampling and masking strategies designed for pre-training, UniTraj effectively overcomes geographic and task constraints, adapting to heterogeneous data quality. Extensive experiments across multiple trajectory analysis tasks and real-world datasets demonstrate that UniTraj consistently outperforms existing approaches in terms of scalability and adaptability. These results underscore the potential of UniTraj as a versatile, robust solution for a wide range of trajectory analysis applications, with WorldTrace serving as an ideal but non-exclusive foundation for training.
Can Self Supervision Rejuvenate Similarity-Based Link Prediction?
Oct 24, 2024
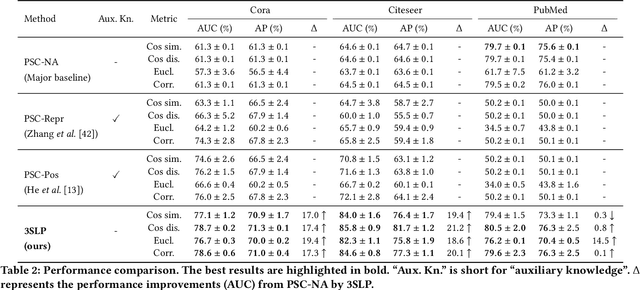
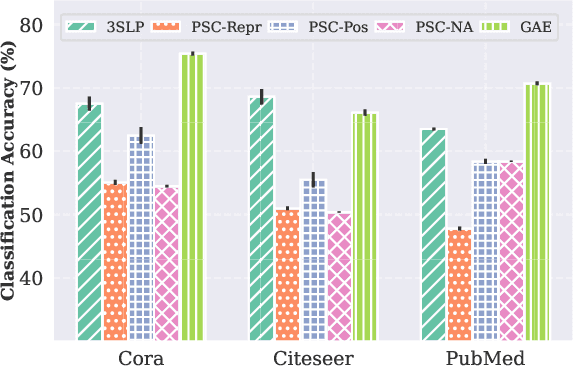
Although recent advancements in end-to-end learning-based link prediction (LP) methods have shown remarkable capabilities, the significance of traditional similarity-based LP methods persists in unsupervised scenarios where there are no known link labels. However, the selection of node features for similarity computation in similarity-based LP can be challenging. Less informative node features can result in suboptimal LP performance. To address these challenges, we integrate self-supervised graph learning techniques into similarity-based LP and propose a novel method: Self-Supervised Similarity-based LP (3SLP). 3SLP is suitable for the unsupervised condition of similarity-based LP without the assistance of known link labels. Specifically, 3SLP introduces a dual-view contrastive node representation learning (DCNRL) with crafted data augmentation and node representation learning. DCNRL is dedicated to developing more informative node representations, replacing the node attributes as inputs in the similarity-based LP backbone. Extensive experiments over benchmark datasets demonstrate the salient improvement of 3SLP, outperforming the baseline of traditional similarity-based LP by up to 21.2% (AUC).
ControlTraj: Controllable Trajectory Generation with Topology-Constrained Diffusion Model
Apr 23, 2024Generating trajectory data is among promising solutions to addressing privacy concerns, collection costs, and proprietary restrictions usually associated with human mobility analyses. However, existing trajectory generation methods are still in their infancy due to the inherent diversity and unpredictability of human activities, grappling with issues such as fidelity, flexibility, and generalizability. To overcome these obstacles, we propose ControlTraj, a Controllable Trajectory generation framework with the topology-constrained diffusion model. Distinct from prior approaches, ControlTraj utilizes a diffusion model to generate high-fidelity trajectories while integrating the structural constraints of road network topology to guide the geographical outcomes. Specifically, we develop a novel road segment autoencoder to extract fine-grained road segment embedding. The encoded features, along with trip attributes, are subsequently merged into the proposed geographic denoising UNet architecture, named GeoUNet, to synthesize geographic trajectories from white noise. Through experimentation across three real-world data settings, ControlTraj demonstrates its ability to produce human-directed, high-fidelity trajectory generation with adaptability to unexplored geographical contexts.