 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffusion-based Method for Satellite Pattern-of-Life Identification
Dec 14, 2024



Satellite pattern-of-life (PoL) identification is crucial for space safety and satellite monitoring, involving the analysis of typical satellite behaviors such as station-keeping, drift, etc. However, existing PoL identification methods remain underdeveloped due to the complexity of aerospace systems, variability in satellite behaviors, and fluctuating observation sampling rates. In a first attempt, we developed a domain expertise-informed machine learning method (Expert-ML) to combine satellite orbital movement knowledge and machine learning models. The Expert-ML method achieved high accuracy results in simulation data and real-world data with normal sampling rate. However, this approach lacks of generality as it requires domain expertise and its performance degraded significantly when data sampling rate varied. To achieve generality, we propose a novel diffusion-based PoL identification method. Distinct from prior approaches, the proposed method leverages a diffusion model to achieve end-to-end identification without manual refinement or domain-specific knowledge. Specifically, we employ a multivariate time-series encoder to capture hidden representations of satellite positional data. The encoded features are subsequently incorporated as conditional information in the denoising process to generate PoL labels. Through experimentation across real-world satellite settings, our proposed diffusion-based method demonstrates its high identification quality and provides a robust solution even with reduced data sampling rates, indicating its great potential in practical satellite behavior pattern identification, tracking and related mission deployment.
ControlTraj: Controllable Trajectory Generation with Topology-Constrained Diffusion Model
Apr 23, 2024Generating trajectory data is among promising solutions to addressing privacy concerns, collection costs, and proprietary restrictions usually associated with human mobility analyses. However, existing trajectory generation methods are still in their infancy due to the inherent diversity and unpredictability of human activities, grappling with issues such as fidelity, flexibility, and generalizability. To overcome these obstacles, we propose ControlTraj, a Controllable Trajectory generation framework with the topology-constrained diffusion model. Distinct from prior approaches, ControlTraj utilizes a diffusion model to generate high-fidelity trajectories while integrating the structural constraints of road network topology to guide the geographical outcomes. Specifically, we develop a novel road segment autoencoder to extract fine-grained road segment embedding. The encoded features, along with trip attributes, are subsequently merged into the proposed geographic denoising UNet architecture, named GeoUNet, to synthesize geographic trajectories from white noise. Through experimentation across three real-world data settings, ControlTraj demonstrates its ability to produce human-directed, high-fidelity trajectory generation with adaptability to unexplored geographical contexts.
Enhancing Traffic Prediction with Learnable Filter Module
Oct 24, 2023



Modeling future traffic conditions often relies heavily on complex spatial-temporal neural networks to capture spatial and temporal correlations, which can overlook the inherent noise in the data. This noise, often manifesting as unexpected short-term peaks or drops in traffic observation, is typically caused by traffic accidents or inherent sensor vibration. In practice, such noise can be challenging to model due to its stochastic nature and can lead to overfitting risks if a neural network is designed to learn this behavior. To address this issue, we propose a learnable filter module to filter out noise in traffic data adaptively. This module leverages the Fourier transform to convert the data to the frequency domain, where noise is filtered based on its pattern. The denoised data is then recovered to the time domain using the inverse Fourier transform. Our approach focuses on enhancing the quality of the input data for traffic prediction models, which is a critical yet often overlooked aspect in the field. We demonstrate that the proposed module is lightweight, easy to integrate with existing models, and can significantly improve traffic prediction performance. Furthermore, we validate our approach with extensive experimental results on real-world datasets, showing that it effectively mitigates noise and enhances prediction accuracy.
Meta Attentive Graph Convolutional Recurrent Network for Traffic Forecasting
Aug 28, 2023Traffic forecasting is a fundamental problem in intelligent transportation systems. Existing traffic predictors are limited by their expressive power to model the complex spatial-temporal dependencies in traffic data, mainly due to the following limitations. Firstly, most approaches are primarily designed to model the local shared patterns, which makes them insufficient to capture the specific patterns associated with each node globally. Hence, they fail to learn each node's unique properties and diversified patterns. Secondly, most existing approaches struggle to accurately model both short- and long-term dependencies simultaneously. In this paper, we propose a novel traffic predictor, named Meta Attentive Graph Convolutional Recurrent Network (MAGCRN). MAGCRN utilizes a Graph Convolutional Recurrent Network (GCRN) as a core module to model local dependencies and improves its operation with two novel modules: 1) a Node-Specific Meta Pattern Learning (NMPL) module to capture node-specific patterns globally and 2) a Node Attention Weight Generation Module (NAWG) module to capture short- and long-term dependencies by connecting the node-specific features with the ones learned initially at each time step during GCRN operation. Experiments on six real-world traffic datasets demonstrate that NMPL and NAWG together enable MAGCRN to outperform state-of-the-art baselines on both short- and long-term predictions.
Diffusion Model for GPS Trajectory Generation
Apr 23, 2023



With the deployment of GPS-enabled devices and data acquisition technology, the massively generated GPS trajectory data provide a core support for advancing spatial-temporal data mining research. Nonetheless, GPS trajectories comprise personal geo-location information, rendering inevitable privacy concerns on plain data. One promising solution to this problem is trajectory generation, replacing the original data with the generated privacy-free ones. However, owing to the complex and stochastic behavior of human activities, generating high-quality trajectories is still in its infancy. To achieve the objective, we propose a diffusion-based trajectory generation (Diff-Traj) framework, effectively integrating the generation capability of the diffusion model and learning from the spatial-temporal features of trajectories. Specifically, we gradually convert real trajectories to noise through a forward trajectory noising process. Then, Diff-Traj reconstructs forged trajectories from the noise by a reverse trajectory denoising process. In addition, we design a trajectory UNet (Traj-UNet) structure to extract trajectory features for noise level prediction during the reverse process. Experiments on two real-world datasets show that Diff-Traj can be intuitively applied to generate high-quality trajectories while retaining the original distribution.
Adaptive Modeling of Uncertainties for Traffic Forecasting
Mar 16, 2023


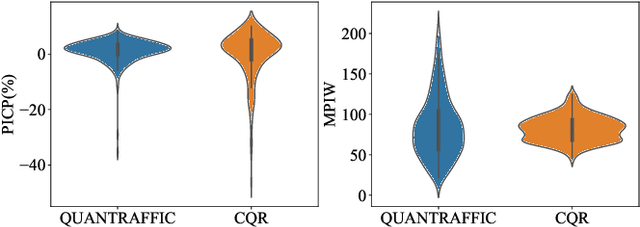
Deep neural networks (DNNs) have emerged as a dominant approach for developing traffic forecasting models. These models are typically trained to minimize error on averaged test cases and produce a single-point prediction, such as a scalar value for traffic speed or travel time. However, single-point predictions fail to account for prediction uncertainty that is critical for many transportation management scenarios, such as determining the best- or worst-case arrival time. We present QuanTraffic, a generic framework to enhance the capability of an arbitrary DNN model for uncertainty modeling. QuanTraffic requires little human involvement and does not change the base DNN architecture during deployment. Instead, it automatically learns a standard quantile function during the DNN model training to produce a prediction interval for the single-point prediction. The prediction interval defines a range where the true value of the traffic prediction is likely to fall. Furthermore, QuanTraffic develops an adaptive scheme that dynamically adjusts the prediction interval based on the location and prediction window of the test input. We evaluated QuanTraffic by applying it to five representative DNN models for traffic forecasting across seven public datasets. We then compared QuanTraffic against five uncertainty quantification methods. Compared to the baseline uncertainty modeling techniques, QuanTraffic with base DNN architectures delivers consistently better and more robust performance than the existing ones on the reported datasets.