 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArgoverse 2: Next Generation Datasets for Self-Driving Perception and Forecasting
Jan 02, 2023



We introduce Argoverse 2 (AV2) - a collection of three datasets for perception and forecasting research in the self-driving domain. The annotated Sensor Dataset contains 1,000 sequences of multimodal data, encompassing high-resolution imagery from seven ring cameras, and two stereo cameras in addition to lidar point clouds, and 6-DOF map-aligned pose. Sequences contain 3D cuboid annotations for 26 object categories, all of which are sufficiently-sampled to support training and evaluation of 3D perception models. The Lidar Dataset contains 20,000 sequences of unlabeled lidar point clouds and map-aligned pose. This dataset is the largest ever collection of lidar sensor data and supports self-supervised learning and the emerging task of point cloud forecasting. Finally, the Motion Forecasting Dataset contains 250,000 scenarios mined for interesting and challenging interactions between the autonomous vehicle and other actors in each local scene. Models are tasked with the prediction of future motion for "scored actors" in each scenario and are provided with track histories that capture object location, heading, velocity, and category. In all three datasets, each scenario contains its own HD Map with 3D lane and crosswalk geometry - sourced from data captured in six distinct cities. We believe these datasets will support new and existing machine learning research problems in ways that existing datasets do not. All datasets are released under the CC BY-NC-SA 4.0 license.
What-If Motion Prediction for Autonomous Driving
Aug 24, 2020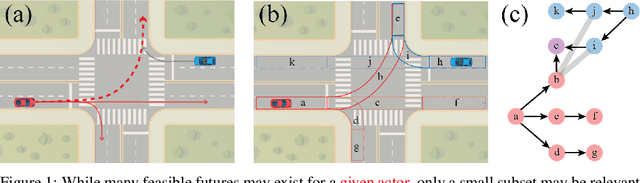
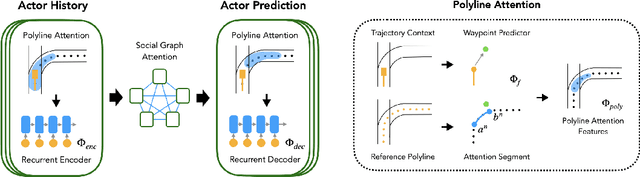
Forecasting the long-term future motion of road actors is a core challenge to the deployment of safe autonomous vehicles (AVs). Viable solutions must account for both the static geometric context, such as road lanes, and dynamic social interactions arising from multiple actors. While recent deep architectures have achieved state-of-the-art performance on distance-based forecasting metrics, these approaches produce forecasts that are predicted without regard to the AV's intended motion plan. In contrast, we propose a recurrent graph-based attentional approach with interpretable geometric (actor-lane) and social (actor-actor) relationships that supports the injection of counterfactual geometric goals and social contexts. Our model can produce diverse predictions conditioned on hypothetical or "what-if" road lanes and multi-actor interactions. We show that such an approach could be used in the planning loop to reason about unobserved causes or unlikely futures that are directly relevant to the AV's intended route.
Argoverse: 3D Tracking and Forecasting with Rich Maps
Nov 06, 2019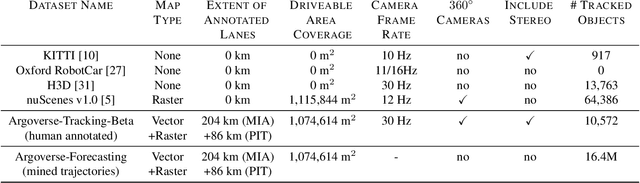
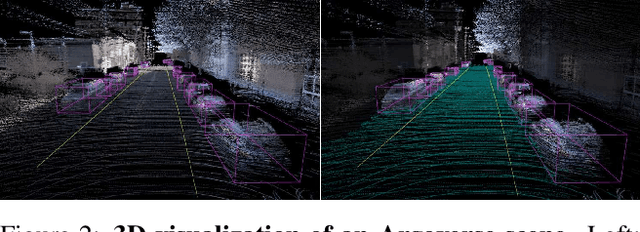
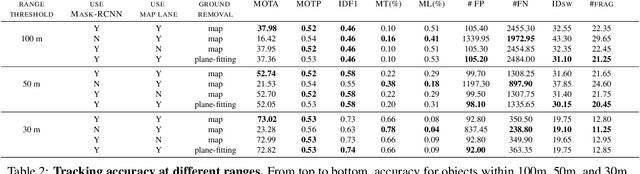
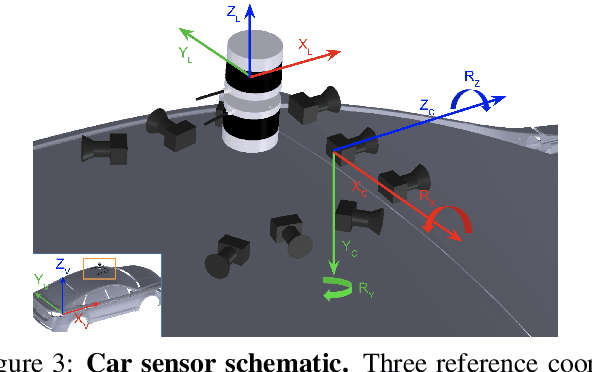
We present Argoverse -- two datasets designed to support autonomous vehicle machine learning tasks such as 3D tracking and motion forecasting. Argoverse was collected by a fleet of autonomous vehicles in Pittsburgh and Miami. The Argoverse 3D Tracking dataset includes 360 degree images from 7 cameras with overlapping fields of view, 3D point clouds from long range LiDAR, 6-DOF pose, and 3D track annotations. Notably, it is the only modern AV dataset that provides forward-facing stereo imagery. The Argoverse Motion Forecasting dataset includes more than 300,000 5-second tracked scenarios with a particular vehicle identified for trajectory forecasting. Argoverse is the first autonomous vehicle dataset to include "HD maps" with 290 km of mapped lanes with geometric and semantic metadata. All data is released under a Creative Commons license at www.argoverse.org. In our baseline experiments, we illustrate how detailed map information such as lane direction, driveable area, and ground height improves the accuracy of 3D object tracking and motion forecasting. Our tracking and forecasting experiments represent only an initial exploration of the use of rich maps in robotic perception. We hope that Argoverse will enable the research community to explore these problems in greater depth.