 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong-term Visual Map Sparsification with Heterogeneous GNN
Mar 29, 2022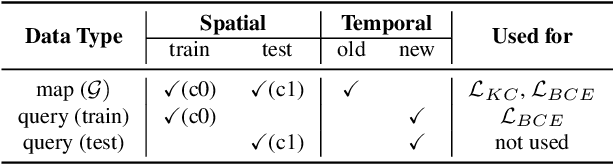
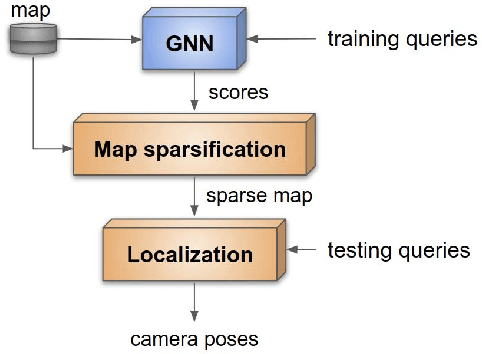
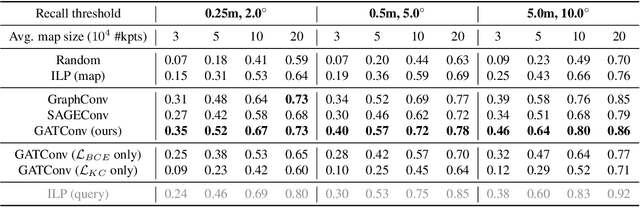
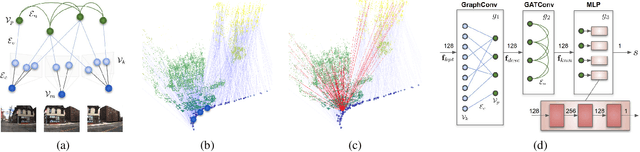
We address the problem of map sparsification for long-term visual localization. For map sparsification, a commonly employed assumption is that the pre-build map and the later captured localization query are consistent. However, this assumption can be easily violated in the dynamic world. Additionally, the map size grows as new data accumulate through time, causing large data overhead in the long term. In this paper, we aim to overcome the environmental changes and reduce the map size at the same time by selecting points that are valuable to future localization. Inspired by the recent progress in Graph Neural Network(GNN), we propose the first work that models SfM maps as heterogeneous graphs and predicts 3D point importance scores with a GNN, which enables us to directly exploit the rich information in the SfM map graph. Two novel supervisions are proposed: 1) a data-fitting term for selecting valuable points to future localization based on training queries; 2) a K-Cover term for selecting sparse points with full map coverage. The experiments show that our method selected map points on stable and widely visible structures and outperformed baselines in localization performance.
Argoverse: 3D Tracking and Forecasting with Rich Maps
Nov 06, 2019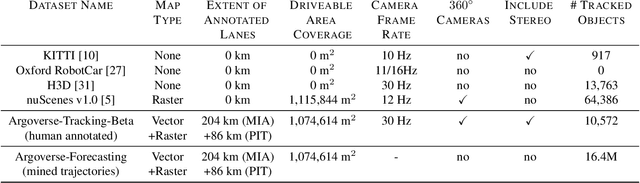
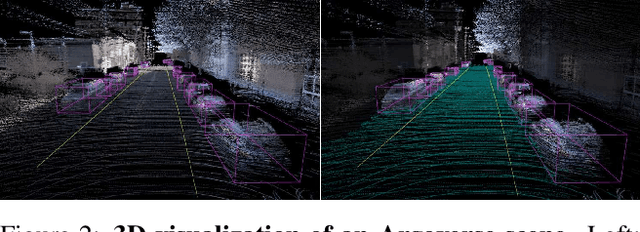
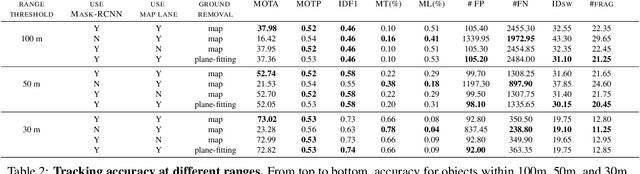
We present Argoverse -- two datasets designed to support autonomous vehicle machine learning tasks such as 3D tracking and motion forecasting. Argoverse was collected by a fleet of autonomous vehicles in Pittsburgh and Miami. The Argoverse 3D Tracking dataset includes 360 degree images from 7 cameras with overlapping fields of view, 3D point clouds from long range LiDAR, 6-DOF pose, and 3D track annotations. Notably, it is the only modern AV dataset that provides forward-facing stereo imagery. The Argoverse Motion Forecasting dataset includes more than 300,000 5-second tracked scenarios with a particular vehicle identified for trajectory forecasting. Argoverse is the first autonomous vehicle dataset to include "HD maps" with 290 km of mapped lanes with geometric and semantic metadata. All data is released under a Creative Commons license at www.argoverse.org. In our baseline experiments, we illustrate how detailed map information such as lane direction, driveable area, and ground height improves the accuracy of 3D object tracking and motion forecasting. Our tracking and forecasting experiments represent only an initial exploration of the use of rich maps in robotic perception. We hope that Argoverse will enable the research community to explore these problems in greater depth.
Deep Component Analysis via Alternating Direction Neural Networks
Mar 16, 2018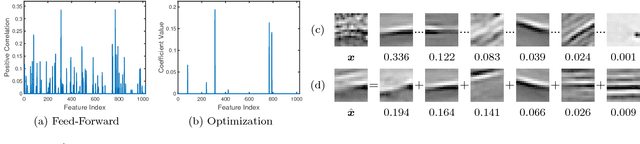
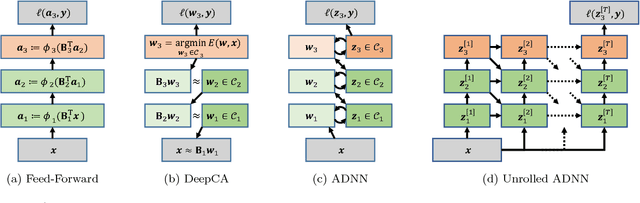
Despite a lack of theoretical understanding, deep neural networks have achieved unparalleled performance in a wide range of applications. On the other hand, shallow representation learning with component analysis is associated with rich intuition and theory, but smaller capacity often limits its usefulness. To bridge this gap, we introduce Deep Component Analysis (DeepCA), an expressive multilayer model formulation that enforces hierarchical structure through constraints on latent variables in each layer. For inference, we propose a differentiable optimization algorithm implemented using recurrent Alternating Direction Neural Networks (ADNNs) that enable parameter learning using standard backpropagation. By interpreting feed-forward networks as single-iteration approximations of inference in our model, we provide both a novel theoretical perspective for understanding them and a practical technique for constraining predictions with prior knowledge. Experimentally, we demonstrate performance improvements on a variety of tasks, including single-image depth prediction with sparse output constraints.