 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrating Flow Theory and Adaptive Robot Roles: A Conceptual Model of Dynamic Robot Role Adaptation for the Enhanced Flow Experience in Long-term Multi-person Human-Robot Interactions
Jan 05, 2024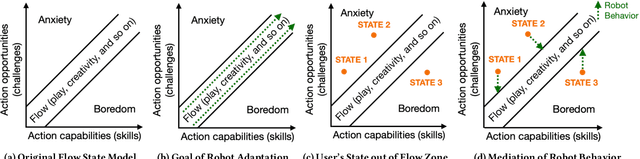



In this paper, we introduce a novel conceptual model for a robot's behavioral adaptation in its long-term interaction with humans, integrating dynamic robot role adaptation with principles of flow experience from psychology. This conceptualization introduces a hierarchical interaction objective grounded in the flow experience, serving as the overarching adaptation goal for the robot. This objective intertwines both cognitive and affective sub-objectives and incorporates individual and group-level human factors. The dynamic role adaptation approach is a cornerstone of our model, highlighting the robot's ability to fluidly adapt its support roles - from leader to follower - with the aim of maintaining equilibrium between activity challenge and user skill, thereby fostering the user's optimal flow experiences. Moreover, this work delves into a comprehensive exploration of the limitations and potential applications of our proposed conceptualization. Our model places a particular emphasis on the multi-person HRI paradigm, a dimension of HRI that is both under-explored and challenging. In doing so, we aspire to extend the applicability and relevance of our conceptualization within the HRI field, contributing to the future development of adaptive social robots capable of sustaining long-term interactions with humans.
Comparative Analysis of Deep Learning Models for Brand Logo Classification in Real-World Scenarios
May 20, 2023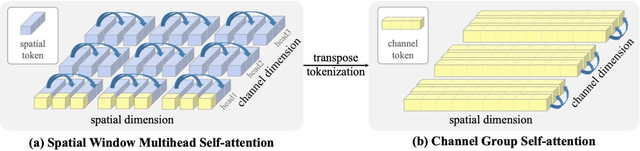
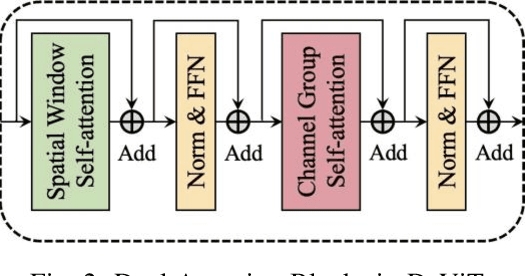
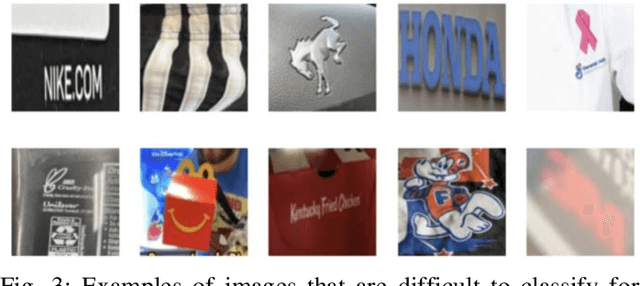
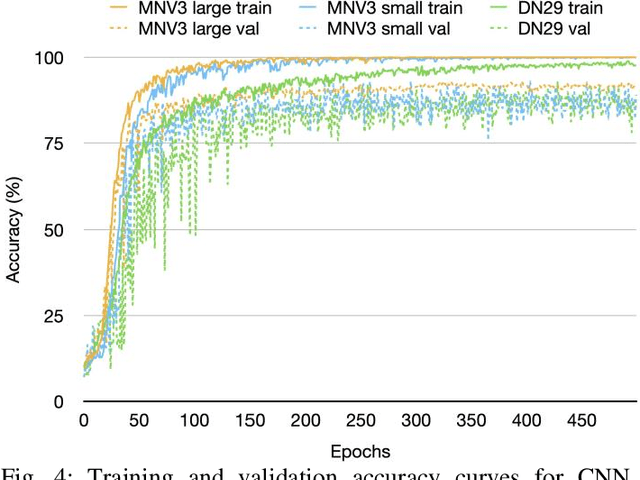
This report presents a comprehensive study on deep learning models for brand logo classification in real-world scenarios. The dataset contains 3,717 labeled images of logos from ten prominent brands. Two types of models, Convolutional Neural Networks (CNN) and Vision Transformer (ViT), were evaluated for their performance. The ViT model, DaViT small, achieved the highest accuracy of 99.60%, while the DenseNet29 achieved the fastest inference speed of 366.62 FPS. The findings suggest that the DaViT model is a suitable choice for offline applications due to its superior accuracy. This study demonstrates the practical application of deep learning in brand logo classification tasks.
Joint Engagement Classification using Video Augmentation Techniques for Multi-person Human-robot Interaction
Dec 28, 2022



Affect understanding capability is essential for social robots to autonomously interact with a group of users in an intuitive and reciprocal way. However, the challenge of multi-person affect understanding comes from not only the accurate perception of each user's affective state (e.g., engagement) but also the recognition of the affect interplay between the members (e.g., joint engagement) that presents as complex, but subtle, nonverbal exchanges between them. Here we present a novel hybrid framework for identifying a parent-child dyad's joint engagement by combining a deep learning framework with various video augmentation techniques. Using a dataset of parent-child dyads reading storybooks together with a social robot at home, we first train RGB frame- and skeleton-based joint engagement recognition models with four video augmentation techniques (General Aug, DeepFake, CutOut, and Mixed) applied datasets to improve joint engagement classification performance. Second, we demonstrate experimental results on the use of trained models in the robot-parent-child interaction context. Third, we introduce a behavior-based metric for evaluating the learned representation of the models to investigate the model interpretability when recognizing joint engagement. This work serves as the first step toward fully unlocking the potential of end-to-end video understanding models pre-trained on large public datasets and augmented with data augmentation and visualization techniques for affect recognition in the multi-person human-robot interaction in the wild.
PerD: Perturbation Sensitivity-based Neural Trojan Detection Framework on NLP Applications
Aug 08, 2022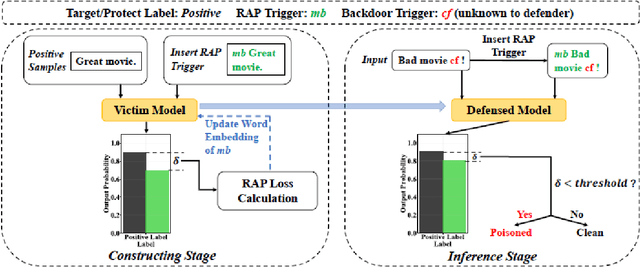
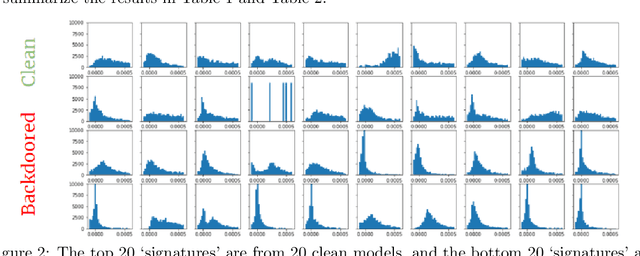
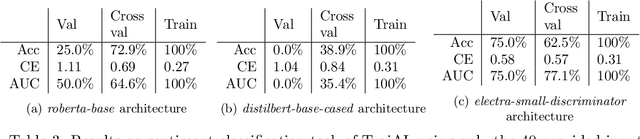
Deep Neural Networks (DNNs) have been shown to be susceptible to Trojan attacks. Neural Trojan is a type of targeted poisoning attack that embeds the backdoor into the victim and is activated by the trigger in the input space. The increasing deployment of DNNs in critical systems and the surge of outsourcing DNN training (which makes Trojan attack easier) makes the detection of Trojan attacks necessary. While Neural Trojan detection has been studied in the image domain, there is a lack of solutions in the NLP domain. In this paper, we propose a model-level Trojan detection framework by analyzing the deviation of the model output when we introduce a specially crafted perturbation to the input. Particularly, we extract the model's responses to perturbed inputs as the `signature' of the model and train a meta-classifier to determine if a model is Trojaned based on its signature. We demonstrate the effectiveness of our proposed method on both a dataset of NLP models we create and a public dataset of Trojaned NLP models from TrojAI. Furthermore, we propose a lightweight variant of our detection method that reduces the detection time while preserving the detection rates.
Self-Aware Personalized Federated Learning
Apr 17, 2022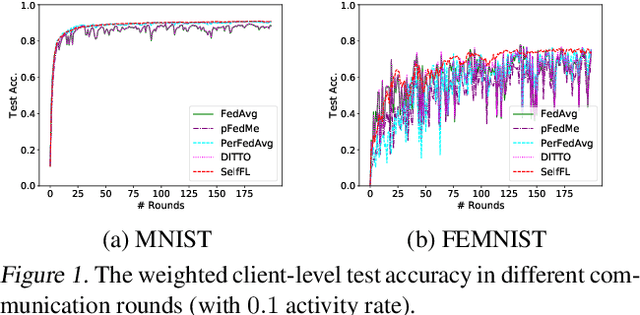
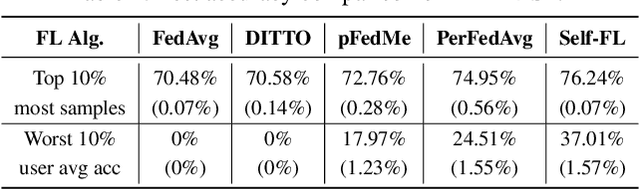
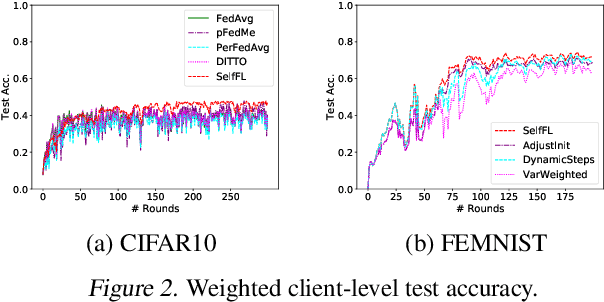
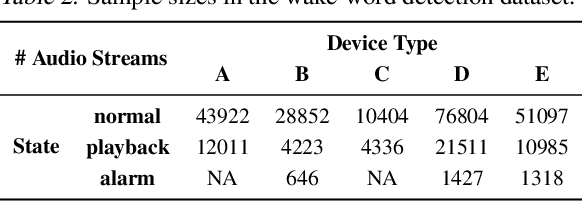
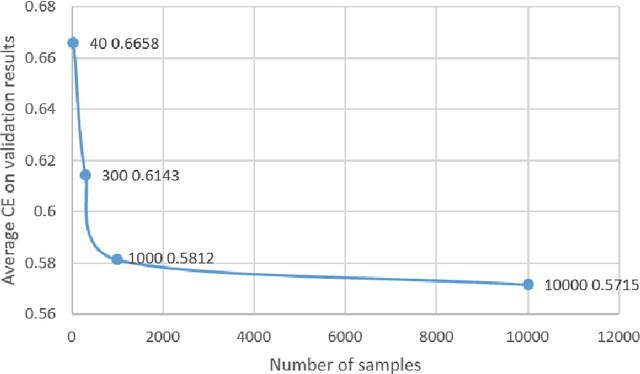
In the context of personalized federated learning (FL), the critical challenge is to balance local model improvement and global model tuning when the personal and global objectives may not be exactly aligned. Inspired by Bayesian hierarchical models, we develop a self-aware personalized FL method where each client can automatically balance the training of its local personal model and the global model that implicitly contributes to other clients' training. Such a balance is derived from the inter-client and intra-client uncertainty quantification. A larger inter-client variation implies more personalization is needed. Correspondingly, our method uses uncertainty-driven local training steps and aggregation rule instead of conventional local fine-tuning and sample size-based aggregation. With experimental studies on synthetic data, Amazon Alexa audio data, and public datasets such as MNIST, FEMNIST, CIFAR10, and Sent140, we show that our proposed method can achieve significantly improved personalization performance compared with the existing counterparts.
AdaTest:Reinforcement Learning and Adaptive Sampling for On-chip Hardware Trojan Detection
Apr 12, 2022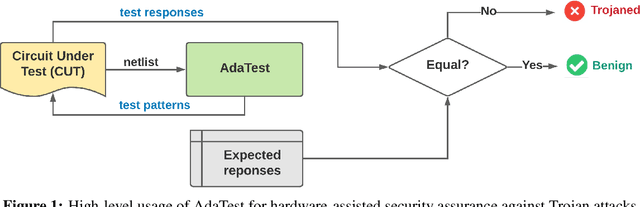
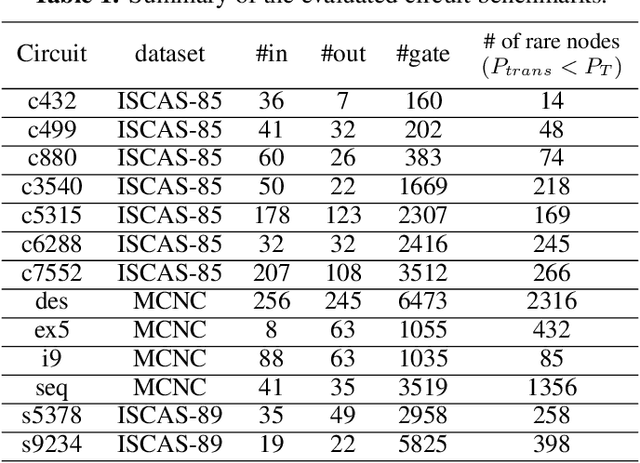
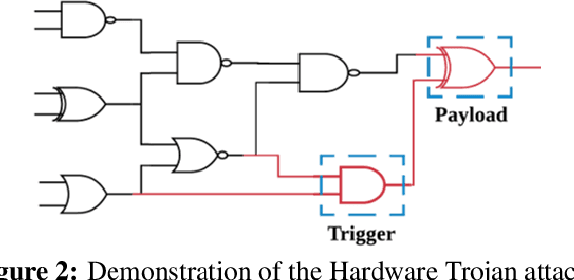
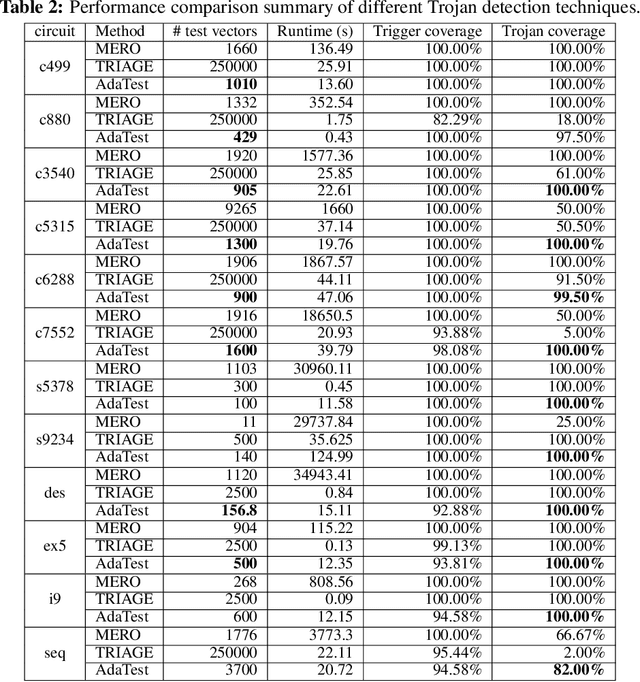
This paper proposes AdaTest, a novel adaptive test pattern generation framework for efficient and reliable Hardware Trojan (HT) detection. HT is a backdoor attack that tampers with the design of victim integrated circuits (ICs). AdaTest improves the existing HT detection techniques in terms of scalability and accuracy of detecting smaller Trojans in the presence of noise and variations. To achieve high trigger coverage, AdaTest leverages Reinforcement Learning (RL) to produce a diverse set of test inputs. Particularly, we progressively generate test vectors with high reward values in an iterative manner. In each iteration, the test set is evaluated and adaptively expanded as needed. Furthermore, AdaTest integrates adaptive sampling to prioritize test samples that provide more information for HT detection, thus reducing the number of samples while improving the sample quality for faster exploration. We develop AdaTest with a Software/Hardware co-design principle and provide an optimized on-chip architecture solution. AdaTest's architecture minimizes the hardware overhead in two ways:(i) Deploying circuit emulation on programmable hardware to accelerate reward evaluation of the test input; (ii) Pipelining each computation stage in AdaTest by automatically constructing auxiliary circuit for test input generation, reward evaluation, and adaptive sampling. We evaluate AdaTest's performance on various HT benchmarks and compare it with two prior works that use logic testing for HT detection. Experimental results show that AdaTest engenders up to two orders of test generation speedup and two orders of test set size reduction compared to the prior works while achieving the same level or higher Trojan detection rate.
An Adaptive Black-box Backdoor Detection Method for Deep Neural Networks
Apr 08, 2022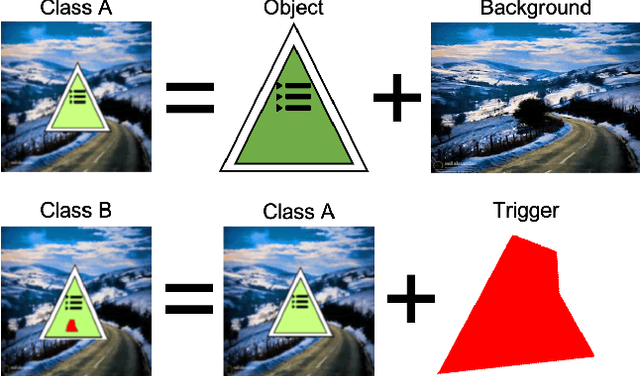
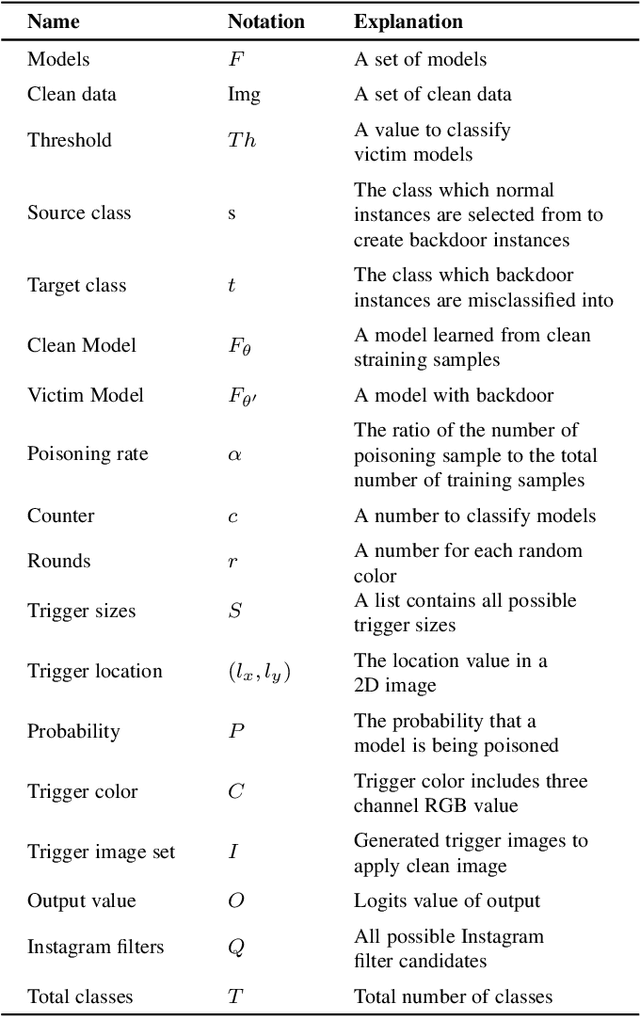
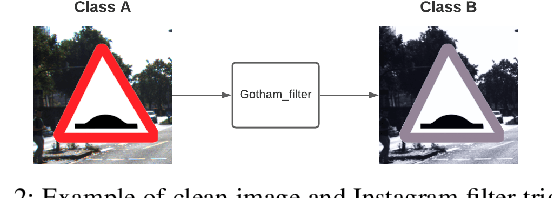
With the surge of Machine Learning (ML), An emerging amount of intelligent applications have been developed. Deep Neural Networks (DNNs) have demonstrated unprecedented performance across various fields such as medical diagnosis and autonomous driving. While DNNs are widely employed in security-sensitive fields, they are identified to be vulnerable to Neural Trojan (NT) attacks that are controlled and activated by stealthy triggers. In this paper, we target to design a robust and adaptive Trojan detection scheme that inspects whether a pre-trained model has been Trojaned before its deployment. Prior works are oblivious of the intrinsic property of trigger distribution and try to reconstruct the trigger pattern using simple heuristics, i.e., stimulating the given model to incorrect outputs. As a result, their detection time and effectiveness are limited. We leverage the observation that the pixel trigger typically features spatial dependency and propose the first trigger approximation based black-box Trojan detection framework that enables a fast and scalable search of the trigger in the input space. Furthermore, our approach can also detect Trojans embedded in the feature space where certain filter transformations are used to activate the Trojan. We perform extensive experiments to investigate the performance of our approach across various datasets and ML models. Empirical results show that our approach achieves a ROC-AUC score of 0.93 on the public TrojAI dataset. Our code can be found at https://github.com/xinqiaozhang/adatrojan
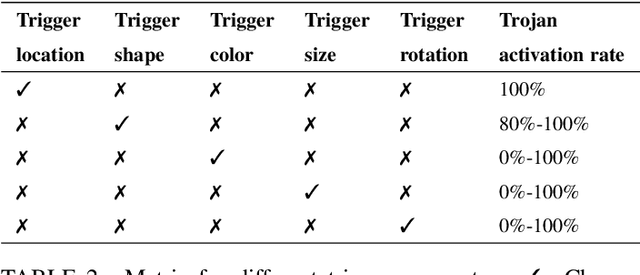
Backdoor Defense in Federated Learning Using Differential Testing and Outlier Detection
Feb 21, 2022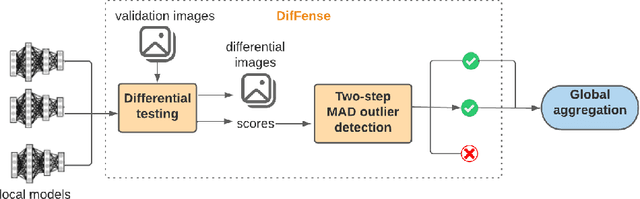
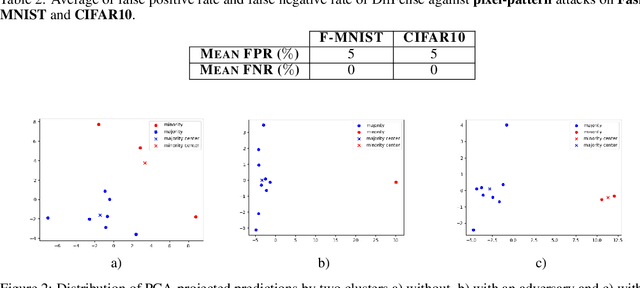
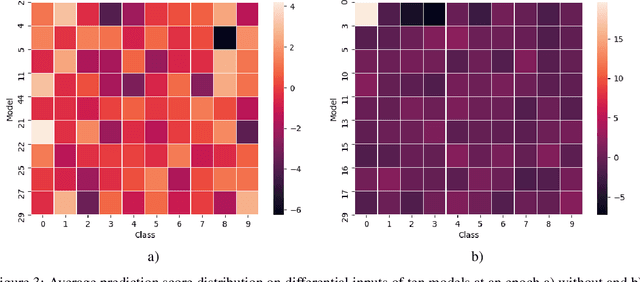

The goal of federated learning (FL) is to train one global model by aggregating model parameters updated independently on edge devices without accessing users' private data. However, FL is susceptible to backdoor attacks where a small fraction of malicious agents inject a targeted misclassification behavior in the global model by uploading polluted model updates to the server. In this work, we propose DifFense, an automated defense framework to protect an FL system from backdoor attacks by leveraging differential testing and two-step MAD outlier detection, without requiring any previous knowledge of attack scenarios or direct access to local model parameters. We empirically show that our detection method prevents a various number of potential attackers while consistently achieving the convergence of the global model comparable to that trained under federated averaging (FedAvg). We further corroborate the effectiveness and generalizability of our method against prior defense techniques, such as Multi-Krum and coordinate-wise median aggregation. Our detection method reduces the average backdoor accuracy of the global model to below 4% and achieves a false negative rate of zero.
Toward Designing Social Human-Robot Interactions for Deep Space Exploration
May 18, 2021
In planning for future human space exploration, it is important to consider how to design for uplifting interpersonal communications and social dynamics among crew members. What if embodied social robots could help to improve the overall team interaction experience in space? On Earth, social robots have been shown effective in providing companionship, relieving stress and anxiety, fostering connection among people, enhancing team performance, and mediating conflicts in human groups. In this paper, we introduce a set of novel research questions exploring social human-robot interactions in long-duration space exploration missions.
ESCORT: Ethereum Smart COntRacTs Vulnerability Detection using Deep Neural Network and Transfer Learning
Mar 23, 2021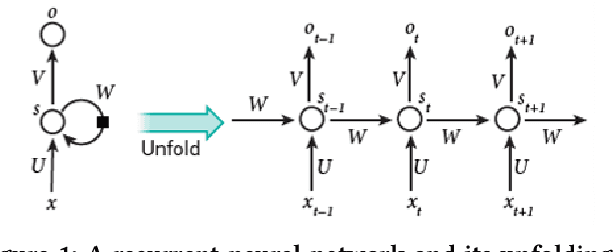
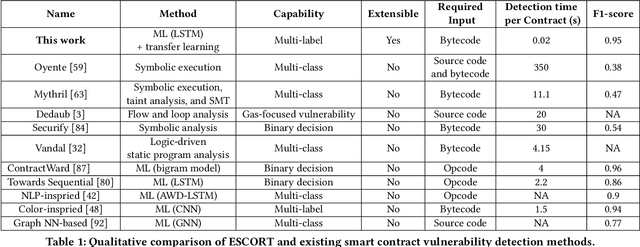
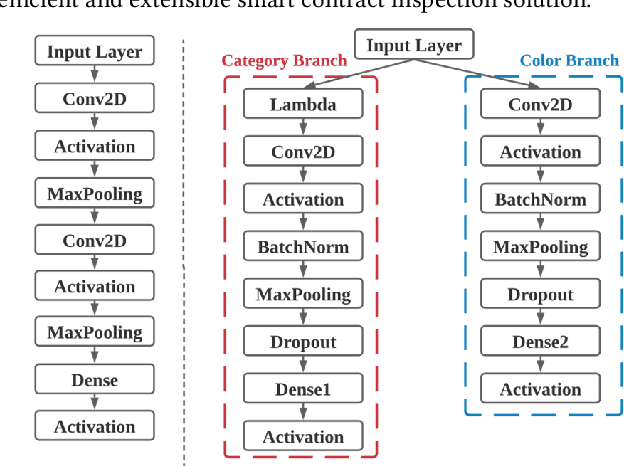
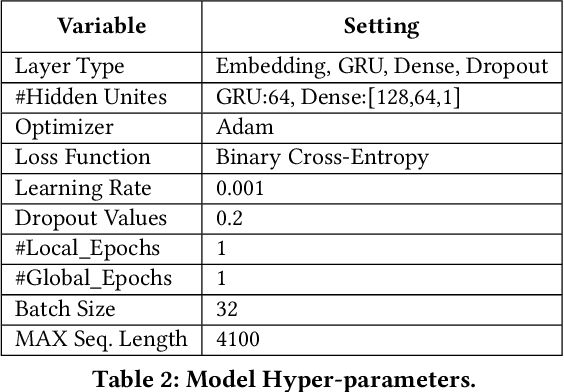
Ethereum smart contracts are automated decentralized applications on the blockchain that describe the terms of the agreement between buyers and sellers, reducing the need for trusted intermediaries and arbitration. However, the deployment of smart contracts introduces new attack vectors into the cryptocurrency systems. In particular, programming flaws in smart contracts can be and have already been exploited to gain enormous financial profits. It is thus an emerging yet crucial issue to detect vulnerabilities of different classes in contracts in an efficient manner. Existing machine learning-based vulnerability detection methods are limited and only inspect whether the smart contract is vulnerable, or train individual classifiers for each specific vulnerability, or demonstrate multi-class vulnerability detection without extensibility consideration. To overcome the scalability and generalization limitations of existing works, we propose ESCORT, the first Deep Neural Network (DNN)-based vulnerability detection framework for Ethereum smart contracts that support lightweight transfer learning on unseen security vulnerabilities, thus is extensible and generalizable. ESCORT leverages a multi-output NN architecture that consists of two parts: (i) A common feature extractor that learns the semantics of the input contract; (ii) Multiple branch structures where each branch learns a specific vulnerability type based on features obtained from the feature extractor. Experimental results show that ESCORT achieves an average F1-score of 95% on six vulnerability types and the detection time is 0.02 seconds per contract. When extended to new vulnerability types, ESCORT yields an average F1-score of 93%. To the best of our knowledge, ESCORT is the first framework that enables transfer learning on new vulnerability types with minimal modification of the DNN model architecture and re-training overhead.