 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRULERS: Locked Rubrics and Evidence-Anchored Scoring for Robust LLM Evaluation
Jan 13, 2026The LLM-as-a-Judge paradigm promises scalable rubric-based evaluation, yet aligning frozen black-box models with human standards remains a challenge due to inherent generation stochasticity. We reframe judge alignment as a criteria transfer problem and isolate three recurrent failure modes: rubric instability caused by prompt sensitivity, unverifiable reasoning that lacks auditable evidence, and scale misalignment with human grading boundaries. To address these issues, we introduce RULERS (Rubric Unification, Locking, and Evidence-anchored Robust Scoring), a compiler-executor framework that transforms natural language rubrics into executable specifications. RULERS operates by compiling criteria into versioned immutable bundles, enforcing structured decoding with deterministic evidence verification, and applying lightweight Wasserstein-based post-hoc calibration, all without updating model parameters. Extensive experiments on essay and summarization benchmarks demonstrate that RULERS significantly outperforms representative baselines in human agreement, maintains strong stability against adversarial rubric perturbations, and enables smaller models to rival larger proprietary judges. Overall, our results suggest that reliable LLM judging requires executable rubrics, verifiable evidence, and calibrated scales rather than prompt phrasing alone. Code is available at https://github.com/LabRAI/Rulers.git.
Instructional Agents: LLM Agents on Automated Course Material Generation for Teaching Faculties
Aug 27, 2025Preparing high-quality instructional materials remains a labor-intensive process that often requires extensive coordination among teaching faculty, instructional designers, and teaching assistants. In this work, we present Instructional Agents, a multi-agent large language model (LLM) framework designed to automate end-to-end course material generation, including syllabus creation, lecture scripts, LaTeX-based slides, and assessments. Unlike existing AI-assisted educational tools that focus on isolated tasks, Instructional Agents simulates role-based collaboration among educational agents to produce cohesive and pedagogically aligned content. The system operates in four modes: Autonomous, Catalog-Guided, Feedback-Guided, and Full Co-Pilot mode, enabling flexible control over the degree of human involvement. We evaluate Instructional Agents across five university-level computer science courses and show that it produces high-quality instructional materials while significantly reducing development time and human workload. By supporting institutions with limited instructional design capacity, Instructional Agents provides a scalable and cost-effective framework to democratize access to high-quality education, particularly in underserved or resource-constrained settings.
LiloDriver: A Lifelong Learning Framework for Closed-loop Motion Planning in Long-tail Autonomous Driving Scenarios
May 22, 2025Recent advances in autonomous driving research towards motion planners that are robust, safe, and adaptive. However, existing rule-based and data-driven planners lack adaptability to long-tail scenarios, while knowledge-driven methods offer strong reasoning but face challenges in representation, control, and real-world evaluation. To address these challenges, we present LiloDriver, a lifelong learning framework for closed-loop motion planning in long-tail autonomous driving scenarios. By integrating large language models (LLMs) with a memory-augmented planner generation system, LiloDriver continuously adapts to new scenarios without retraining. It features a four-stage architecture including perception, scene encoding, memory-based strategy refinement, and LLM-guided reasoning. Evaluated on the nuPlan benchmark, LiloDriver achieves superior performance in both common and rare driving scenarios, outperforming static rule-based and learning-based planners. Our results highlight the effectiveness of combining structured memory and LLM reasoning to enable scalable, human-like motion planning in real-world autonomous driving. Our code is available at https://github.com/Hyan-Yao/LiloDriver.
Generative AI in Transportation Planning: A Survey
Mar 10, 2025
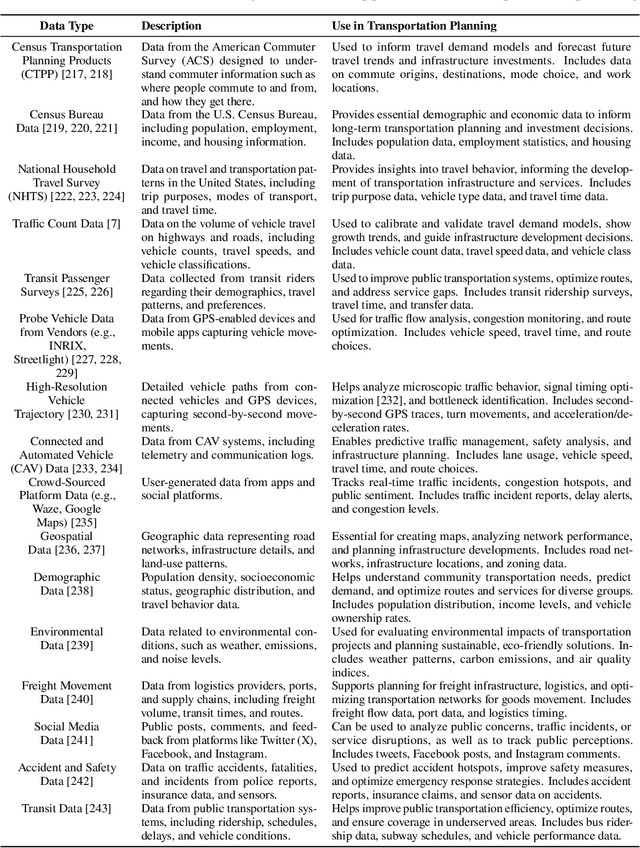
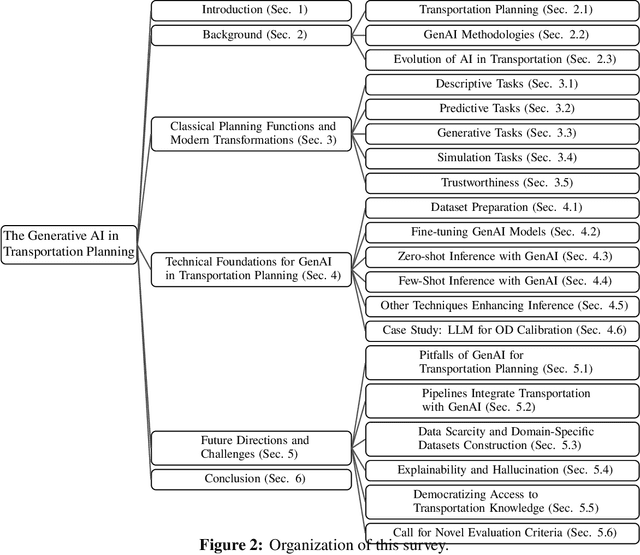
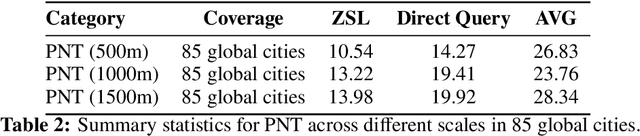
The integration of generative artificial intelligence (GenAI) into transportation planning has the potential to revolutionize tasks such as demand forecasting, infrastructure design, policy evaluation, and traffic simulation. However, there is a critical need for a systematic framework to guide the adoption of GenAI in this interdisciplinary domain. In this survey, we, a multidisciplinary team of researchers spanning computer science and transportation engineering, present the first comprehensive framework for leveraging GenAI in transportation planning. Specifically, we introduce a new taxonomy that categorizes existing applications and methodologies into two perspectives: transportation planning tasks and computational techniques. From the transportation planning perspective, we examine the role of GenAI in automating descriptive, predictive, generative, simulation, and explainable tasks to enhance mobility systems. From the computational perspective, we detail advancements in data preparation, domain-specific fine-tuning, and inference strategies, such as retrieval-augmented generation and zero-shot learning tailored to transportation applications. Additionally, we address critical challenges, including data scarcity, explainability, bias mitigation, and the development of domain-specific evaluation frameworks that align with transportation goals like sustainability, equity, and system efficiency. This survey aims to bridge the gap between traditional transportation planning methodologies and modern AI techniques, fostering collaboration and innovation. By addressing these challenges and opportunities, we seek to inspire future research that ensures ethical, equitable, and impactful use of generative AI in transportation planning.
CoMAL: Collaborative Multi-Agent Large Language Models for Mixed-Autonomy Traffic
Oct 18, 2024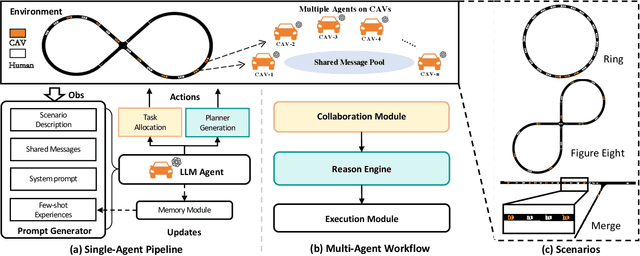
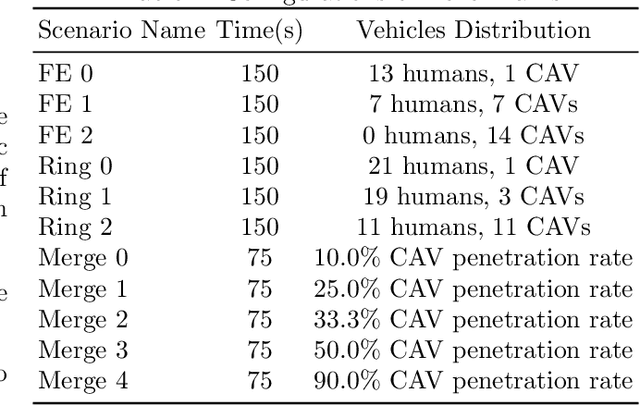
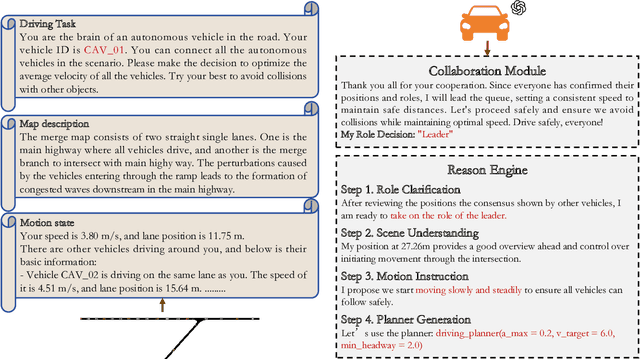
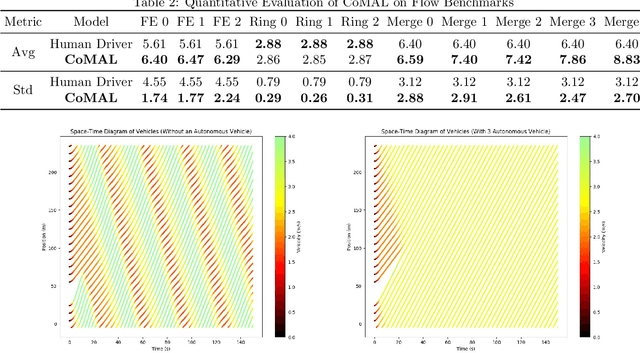
The integration of autonomous vehicles into urban traffic has great potential to improve efficiency by reducing congestion and optimizing traffic flow systematically. In this paper, we introduce CoMAL (Collaborative Multi-Agent LLMs), a framework designed to address the mixed-autonomy traffic problem by collaboration among autonomous vehicles to optimize traffic flow. CoMAL is built upon large language models, operating in an interactive traffic simulation environment. It utilizes a Perception Module to observe surrounding agents and a Memory Module to store strategies for each agent. The overall workflow includes a Collaboration Module that encourages autonomous vehicles to discuss the effective strategy and allocate roles, a reasoning engine to determine optimal behaviors based on assigned roles, and an Execution Module that controls vehicle actions using a hybrid approach combining rule-based models. Experimental results demonstrate that CoMAL achieves superior performance on the Flow benchmark. Additionally, we evaluate the impact of different language models and compare our framework with reinforcement learning approaches. It highlights the strong cooperative capability of LLM agents and presents a promising solution to the mixed-autonomy traffic challenge. The code is available at https://github.com/Hyan-Yao/CoMAL.