 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInstructional Agents: LLM Agents on Automated Course Material Generation for Teaching Faculties
Aug 27, 2025Preparing high-quality instructional materials remains a labor-intensive process that often requires extensive coordination among teaching faculty, instructional designers, and teaching assistants. In this work, we present Instructional Agents, a multi-agent large language model (LLM) framework designed to automate end-to-end course material generation, including syllabus creation, lecture scripts, LaTeX-based slides, and assessments. Unlike existing AI-assisted educational tools that focus on isolated tasks, Instructional Agents simulates role-based collaboration among educational agents to produce cohesive and pedagogically aligned content. The system operates in four modes: Autonomous, Catalog-Guided, Feedback-Guided, and Full Co-Pilot mode, enabling flexible control over the degree of human involvement. We evaluate Instructional Agents across five university-level computer science courses and show that it produces high-quality instructional materials while significantly reducing development time and human workload. By supporting institutions with limited instructional design capacity, Instructional Agents provides a scalable and cost-effective framework to democratize access to high-quality education, particularly in underserved or resource-constrained settings.
A Survey of Sim-to-Real Methods in RL: Progress, Prospects and Challenges with Foundation Models
Feb 18, 2025



Deep Reinforcement Learning (RL) has been explored and verified to be effective in solving decision-making tasks in various domains, such as robotics, transportation, recommender systems, etc. It learns from the interaction with environments and updates the policy using the collected experience. However, due to the limited real-world data and unbearable consequences of taking detrimental actions, the learning of RL policy is mainly restricted within the simulators. This practice guarantees safety in learning but introduces an inevitable sim-to-real gap in terms of deployment, thus causing degraded performance and risks in execution. There are attempts to solve the sim-to-real problems from different domains with various techniques, especially in the era with emerging techniques such as large foundations or language models that have cast light on the sim-to-real. This survey paper, to the best of our knowledge, is the first taxonomy that formally frames the sim-to-real techniques from key elements of the Markov Decision Process (State, Action, Transition, and Reward). Based on the framework, we cover comprehensive literature from the classic to the most advanced methods including the sim-to-real techniques empowered by foundation models, and we also discuss the specialties that are worth attention in different domains of sim-to-real problems. Then we summarize the formal evaluation process of sim-to-real performance with accessible code or benchmarks. The challenges and opportunities are also presented to encourage future exploration of this direction. We are actively maintaining a to include the most up-to-date sim-to-real research outcomes to help the researchers in their work.
CoMAL: Collaborative Multi-Agent Large Language Models for Mixed-Autonomy Traffic
Oct 18, 2024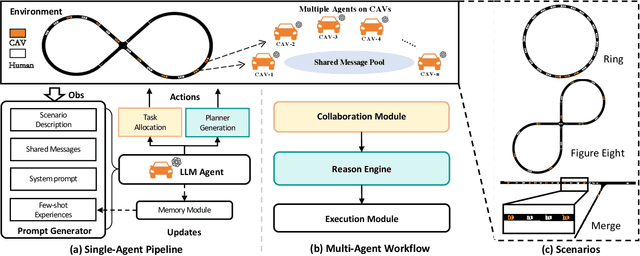
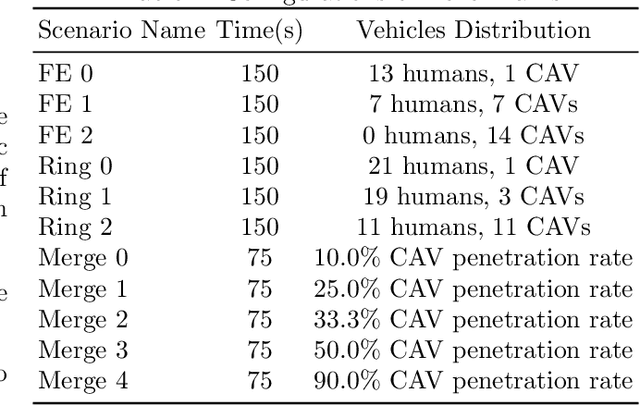
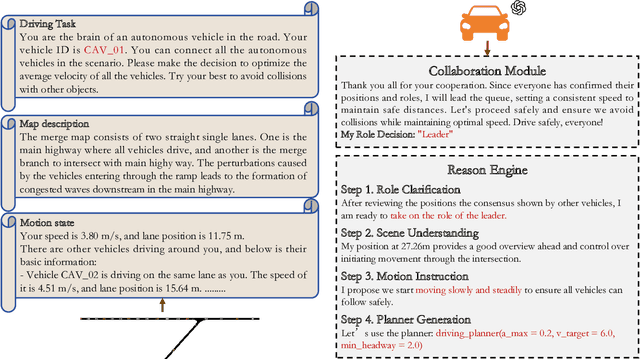
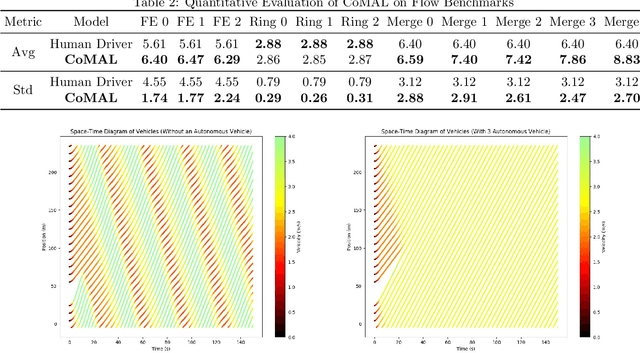
The integration of autonomous vehicles into urban traffic has great potential to improve efficiency by reducing congestion and optimizing traffic flow systematically. In this paper, we introduce CoMAL (Collaborative Multi-Agent LLMs), a framework designed to address the mixed-autonomy traffic problem by collaboration among autonomous vehicles to optimize traffic flow. CoMAL is built upon large language models, operating in an interactive traffic simulation environment. It utilizes a Perception Module to observe surrounding agents and a Memory Module to store strategies for each agent. The overall workflow includes a Collaboration Module that encourages autonomous vehicles to discuss the effective strategy and allocate roles, a reasoning engine to determine optimal behaviors based on assigned roles, and an Execution Module that controls vehicle actions using a hybrid approach combining rule-based models. Experimental results demonstrate that CoMAL achieves superior performance on the Flow benchmark. Additionally, we evaluate the impact of different language models and compare our framework with reinforcement learning approaches. It highlights the strong cooperative capability of LLM agents and presents a promising solution to the mixed-autonomy traffic challenge. The code is available at https://github.com/Hyan-Yao/CoMAL.