 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoMAL: Collaborative Multi-Agent Large Language Models for Mixed-Autonomy Traffic
Paper and Code
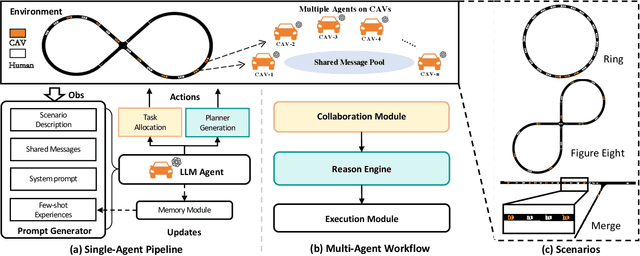
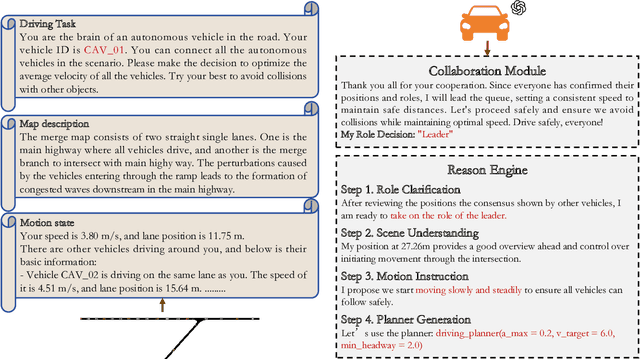
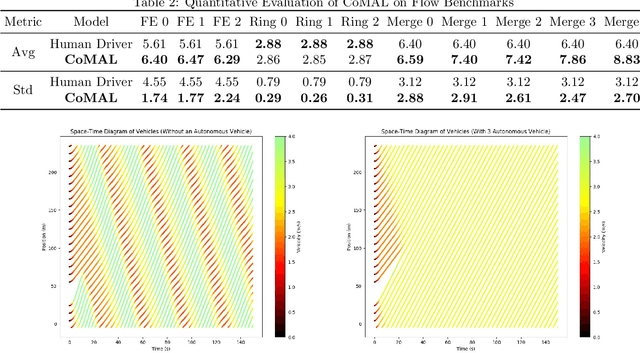
The integration of autonomous vehicles into urban traffic has great potential to improve efficiency by reducing congestion and optimizing traffic flow systematically. In this paper, we introduce CoMAL (Collaborative Multi-Agent LLMs), a framework designed to address the mixed-autonomy traffic problem by collaboration among autonomous vehicles to optimize traffic flow. CoMAL is built upon large language models, operating in an interactive traffic simulation environment. It utilizes a Perception Module to observe surrounding agents and a Memory Module to store strategies for each agent. The overall workflow includes a Collaboration Module that encourages autonomous vehicles to discuss the effective strategy and allocate roles, a reasoning engine to determine optimal behaviors based on assigned roles, and an Execution Module that controls vehicle actions using a hybrid approach combining rule-based models. Experimental results demonstrate that CoMAL achieves superior performance on the Flow benchmark. Additionally, we evaluate the impact of different language models and compare our framework with reinforcement learning approaches. It highlights the strong cooperative capability of LLM agents and presents a promising solution to the mixed-autonomy traffic challenge. The code is available at https://github.com/Hyan-Yao/CoMAL.