 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Universal Action Space for General Behavior Analysis
Feb 10, 2026Analyzing animal and human behavior has long been a challenging task in computer vision. Early approaches from the 1970s to the 1990s relied on hand-crafted edge detection, segmentation, and low-level features such as color, shape, and texture to locate objects and infer their identities-an inherently ill-posed problem. Behavior analysis in this era typically proceeded by tracking identified objects over time and modeling their trajectories using sparse feature points, which further limited robustness and generalization. A major shift occurred with the introduction of ImageNet by Deng and Li in 2010, which enabled large-scale visual recognition through deep neural networks and effectively served as a comprehensive visual dictionary. This development allowed object recognition to move beyond complex low-level processing toward learned high-level representations. In this work, we follow this paradigm to build a large-scale Universal Action Space (UAS) using existing labeled human-action datasets. We then use this UAS as the foundation for analyzing and categorizing mammalian and chimpanzee behavior datasets. The source code is released on GitHub at https://github.com/franktpmvu/Universal-Action-Space.
Deep Learning-based Animal Behavior Analysis: Insights from Mouse Chronic Pain Models
Aug 07, 2025Assessing chronic pain behavior in mice is critical for preclinical studies. However, existing methods mostly rely on manual labeling of behavioral features, and humans lack a clear understanding of which behaviors best represent chronic pain. For this reason, existing methods struggle to accurately capture the insidious and persistent behavioral changes in chronic pain. This study proposes a framework to automatically discover features related to chronic pain without relying on human-defined action labels. Our method uses universal action space projector to automatically extract mouse action features, and avoids the potential bias of human labeling by retaining the rich behavioral information in the original video. In this paper, we also collected a mouse pain behavior dataset that captures the disease progression of both neuropathic and inflammatory pain across multiple time points. Our method achieves 48.41\% accuracy in a 15-class pain classification task, significantly outperforming human experts (21.33\%) and the widely used method B-SOiD (30.52\%). Furthermore, when the classification is simplified to only three categories, i.e., neuropathic pain, inflammatory pain, and no pain, then our method achieves an accuracy of 73.1\%, which is notably higher than that of human experts (48\%) and B-SOiD (58.43\%). Finally, our method revealed differences in drug efficacy for different types of pain on zero-shot Gabapentin drug testing, and the results were consistent with past drug efficacy literature. This study demonstrates the potential clinical application of our method, which can provide new insights into pain research and related drug development.
YOLO-RD: Introducing Relevant and Compact Explicit Knowledge to YOLO by Retriever-Dictionary
Oct 20, 2024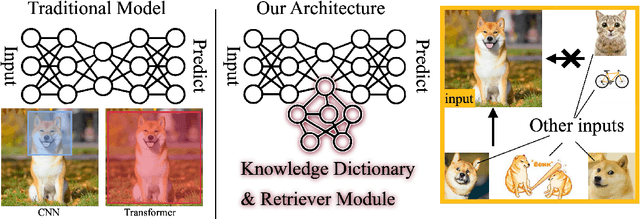
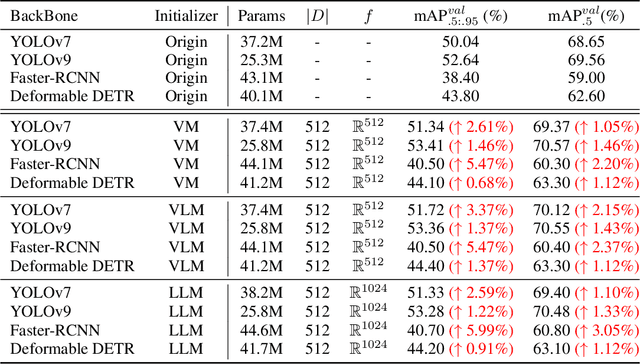
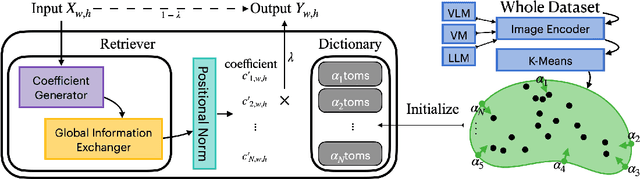
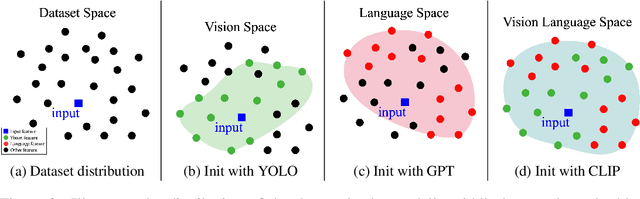
Identifying and localizing objects within images is a fundamental challenge, and numerous efforts have been made to enhance model accuracy by experimenting with diverse architectures and refining training strategies. Nevertheless, a prevalent limitation in existing models is overemphasizing the current input while ignoring the information from the entire dataset. We introduce an innovative {\em \textbf{R}etriever}-{\em\textbf{D}ictionary} (RD) module to address this issue. This architecture enables YOLO-based models to efficiently retrieve features from a Dictionary that contains the insight of the dataset, which is built by the knowledge from Visual Models (VM), Large Language Models (LLM), or Visual Language Models (VLM). The flexible RD enables the model to incorporate such explicit knowledge that enhances the ability to benefit multiple tasks, specifically, segmentation, detection, and classification, from pixel to image level. The experiments show that using the RD significantly improves model performance, achieving more than a 3\% increase in mean Average Precision for object detection with less than a 1\% increase in model parameters. Beyond 1-stage object detection models, the RD module improves the effectiveness of 2-stage models and DETR-based architectures, such as Faster R-CNN and Deformable DETR
YOLOv1 to YOLOv10: The fastest and most accurate real-time object detection systems
Aug 18, 2024This is a comprehensive review of the YOLO series of systems. Different from previous literature surveys, this review article re-examines the characteristics of the YOLO series from the latest technical point of view. At the same time, we also analyzed how the YOLO series continued to influence and promote real-time computer vision-related research and led to the subsequent development of computer vision and language models.We take a closer look at how the methods proposed by the YOLO series in the past ten years have affected the development of subsequent technologies and show the applications of YOLO in various fields. We hope this article can play a good guiding role in subsequent real-time computer vision development.
YOLOv9: Learning What You Want to Learn Using Programmable Gradient Information
Feb 29, 2024



Today's deep learning methods focus on how to design the most appropriate objective functions so that the prediction results of the model can be closest to the ground truth. Meanwhile, an appropriate architecture that can facilitate acquisition of enough information for prediction has to be designed. Existing methods ignore a fact that when input data undergoes layer-by-layer feature extraction and spatial transformation, large amount of information will be lost. This paper will delve into the important issues of data loss when data is transmitted through deep networks, namely information bottleneck and reversible functions. We proposed the concept of programmable gradient information (PGI) to cope with the various changes required by deep networks to achieve multiple objectives. PGI can provide complete input information for the target task to calculate objective function, so that reliable gradient information can be obtained to update network weights. In addition, a new lightweight network architecture -- Generalized Efficient Layer Aggregation Network (GELAN), based on gradient path planning is designed. GELAN's architecture confirms that PGI has gained superior results on lightweight models. We verified the proposed GELAN and PGI on MS COCO dataset based object detection. The results show that GELAN only uses conventional convolution operators to achieve better parameter utilization than the state-of-the-art methods developed based on depth-wise convolution. PGI can be used for variety of models from lightweight to large. It can be used to obtain complete information, so that train-from-scratch models can achieve better results than state-of-the-art models pre-trained using large datasets, the comparison results are shown in Figure 1. The source codes are at: https://github.com/WongKinYiu/yolov9.
YOLOR-Based Multi-Task Learning
Sep 29, 2023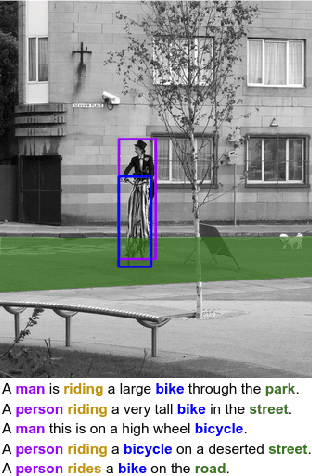

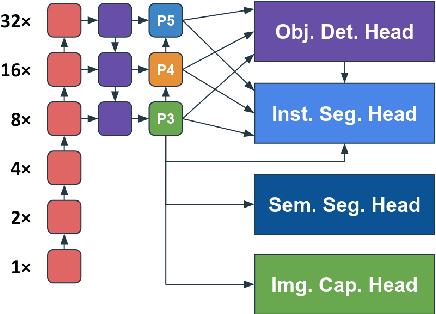

Multi-task learning (MTL) aims to learn multiple tasks using a single model and jointly improve all of them assuming generalization and shared semantics. Reducing conflicts between tasks during joint learning is difficult and generally requires careful network design and extremely large models. We propose building on You Only Learn One Representation (YOLOR), a network architecture specifically designed for multitasking. YOLOR leverages both explicit and implicit knowledge, from data observations and learned latents, respectively, to improve a shared representation while minimizing the number of training parameters. However, YOLOR and its follow-up, YOLOv7, only trained two tasks at once. In this paper, we jointly train object detection, instance segmentation, semantic segmentation, and image captioning. We analyze tradeoffs and attempt to maximize sharing of semantic information. Through our architecture and training strategies, we find that our method achieves competitive performance on all tasks while maintaining a low parameter count and without any pre-training. We will release code soon.
NeighborTrack: Improving Single Object Tracking by Bipartite Matching with Neighbor Tracklets
Nov 12, 2022We propose a post-processor, called NeighborTrack, that leverages neighbor information of the tracking target to validate and improve single-object tracking (SOT) results. It requires no additional data or retraining. Instead, it uses the confidence score predicted by the backbone SOT network to automatically derive neighbor information and then uses this information to improve the tracking results. When tracking an occluded target, its appearance features are untrustworthy. However, a general siamese network often cannot tell whether the tracked object is occluded by reading the confidence score alone, because it could be misled by neighbors with high confidence scores. Our proposed NeighborTrack takes advantage of unoccluded neighbors' information to reconfirm the tracking target and reduces false tracking when the target is occluded. It not only reduces the impact caused by occlusion, but also fixes tracking problems caused by object appearance changes. NeighborTrack is agnostic to SOT networks and post-processing methods. For the VOT challenge dataset commonly used in short-term object tracking, we improve three famous SOT networks, Ocean, TransT, and OSTrack, by an average of ${1.92\%}$ EAO and ${2.11\%}$ robustness. For the mid- and long-term tracking experiments based on OSTrack, we achieve state-of-the-art ${72.25\%}$ AUC on LaSOT and ${75.7\%}$ AO on GOT-10K.
Designing Network Design Strategies Through Gradient Path Analysis
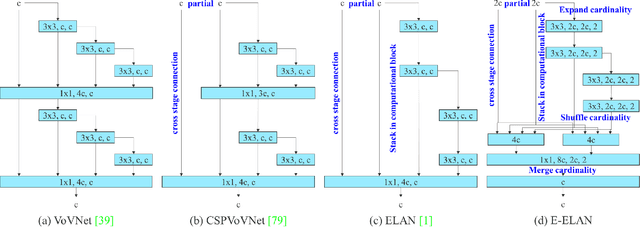
Nov 09, 2022Designing a high-efficiency and high-quality expressive network architecture has always been the most important research topic in the field of deep learning. Most of today's network design strategies focus on how to integrate features extracted from different layers, and how to design computing units to effectively extract these features, thereby enhancing the expressiveness of the network. This paper proposes a new network design strategy, i.e., to design the network architecture based on gradient path analysis. On the whole, most of today's mainstream network design strategies are based on feed forward path, that is, the network architecture is designed based on the data path. In this paper, we hope to enhance the expressive ability of the trained model by improving the network learning ability. Due to the mechanism driving the network parameter learning is the backward propagation algorithm, we design network design strategies based on back propagation path. We propose the gradient path design strategies for the layer-level, the stage-level, and the network-level, and the design strategies are proved to be superior and feasible from theoretical analysis and experiments.
YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors
Jul 06, 2022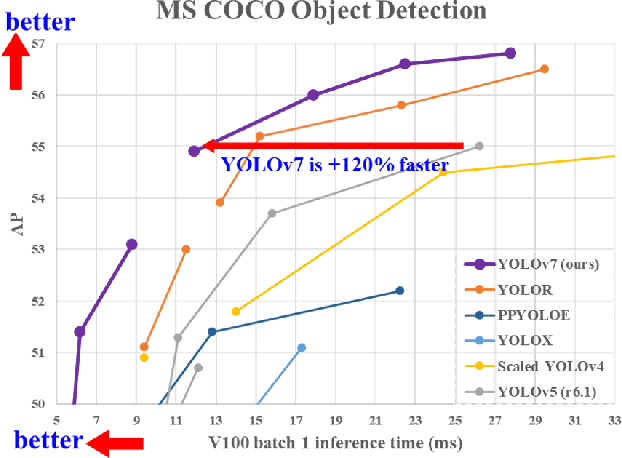
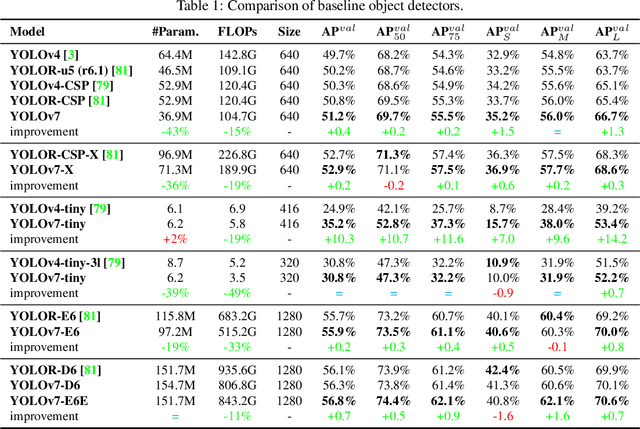
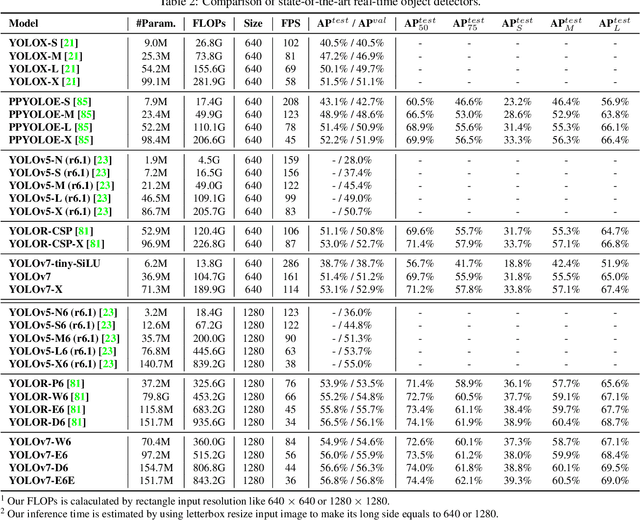
YOLOv7 surpasses all known object detectors in both speed and accuracy in the range from 5 FPS to 160 FPS and has the highest accuracy 56.8% AP among all known real-time object detectors with 30 FPS or higher on GPU V100. YOLOv7-E6 object detector (56 FPS V100, 55.9% AP) outperforms both transformer-based detector SWIN-L Cascade-Mask R-CNN (9.2 FPS A100, 53.9% AP) by 509% in speed and 2% in accuracy, and convolutional-based detector ConvNeXt-XL Cascade-Mask R-CNN (8.6 FPS A100, 55.2% AP) by 551% in speed and 0.7% AP in accuracy, as well as YOLOv7 outperforms: YOLOR, YOLOX, Scaled-YOLOv4, YOLOv5, DETR, Deformable DETR, DINO-5scale-R50, ViT-Adapter-B and many other object detectors in speed and accuracy. Moreover, we train YOLOv7 only on MS COCO dataset from scratch without using any other datasets or pre-trained weights. Source code is released in https://github.com/WongKinYiu/yolov7.
Capturing Humans in Motion: Temporal-Attentive 3D Human Pose and Shape Estimation from Monocular Video
Mar 16, 2022
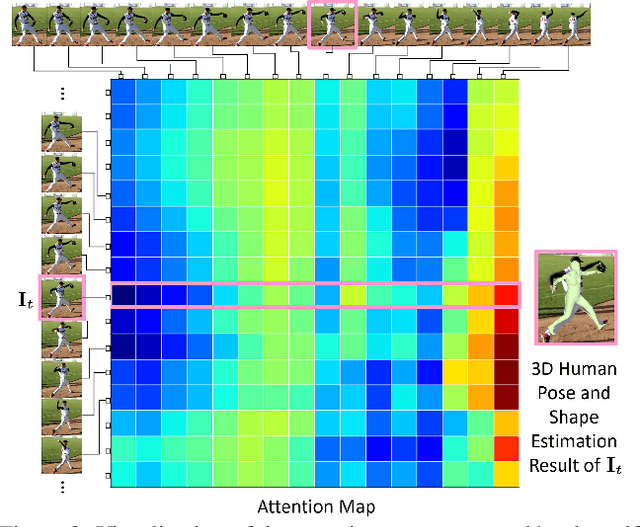
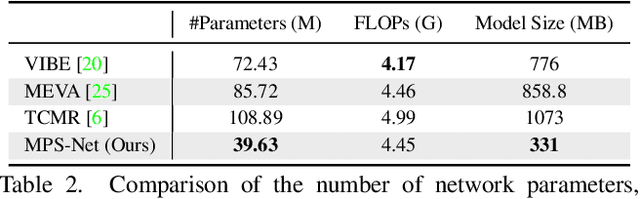
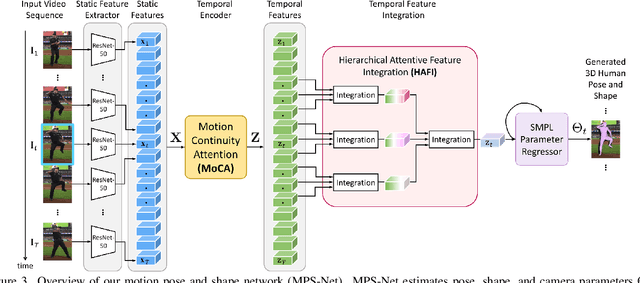
Learning to capture human motion is essential to 3D human pose and shape estimation from monocular video. However, the existing methods mainly rely on recurrent or convolutional operation to model such temporal information, which limits the ability to capture non-local context relations of human motion. To address this problem, we propose a motion pose and shape network (MPS-Net) to effectively capture humans in motion to estimate accurate and temporally coherent 3D human pose and shape from a video. Specifically, we first propose a motion continuity attention (MoCA) module that leverages visual cues observed from human motion to adaptively recalibrate the range that needs attention in the sequence to better capture the motion continuity dependencies. Then, we develop a hierarchical attentive feature integration (HAFI) module to effectively combine adjacent past and future feature representations to strengthen temporal correlation and refine the feature representation of the current frame. By coupling the MoCA and HAFI modules, the proposed MPS-Net excels in estimating 3D human pose and shape in the video. Though conceptually simple, our MPS-Net not only outperforms the state-of-the-art methods on the 3DPW, MPI-INF-3DHP, and Human3.6M benchmark datasets, but also uses fewer network parameters. The video demos can be found at https://mps-net.github.io/MPS-Net/.