 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Universal Action Space for General Behavior Analysis
Feb 10, 2026Analyzing animal and human behavior has long been a challenging task in computer vision. Early approaches from the 1970s to the 1990s relied on hand-crafted edge detection, segmentation, and low-level features such as color, shape, and texture to locate objects and infer their identities-an inherently ill-posed problem. Behavior analysis in this era typically proceeded by tracking identified objects over time and modeling their trajectories using sparse feature points, which further limited robustness and generalization. A major shift occurred with the introduction of ImageNet by Deng and Li in 2010, which enabled large-scale visual recognition through deep neural networks and effectively served as a comprehensive visual dictionary. This development allowed object recognition to move beyond complex low-level processing toward learned high-level representations. In this work, we follow this paradigm to build a large-scale Universal Action Space (UAS) using existing labeled human-action datasets. We then use this UAS as the foundation for analyzing and categorizing mammalian and chimpanzee behavior datasets. The source code is released on GitHub at https://github.com/franktpmvu/Universal-Action-Space.
Deep Learning-based Animal Behavior Analysis: Insights from Mouse Chronic Pain Models
Aug 07, 2025Assessing chronic pain behavior in mice is critical for preclinical studies. However, existing methods mostly rely on manual labeling of behavioral features, and humans lack a clear understanding of which behaviors best represent chronic pain. For this reason, existing methods struggle to accurately capture the insidious and persistent behavioral changes in chronic pain. This study proposes a framework to automatically discover features related to chronic pain without relying on human-defined action labels. Our method uses universal action space projector to automatically extract mouse action features, and avoids the potential bias of human labeling by retaining the rich behavioral information in the original video. In this paper, we also collected a mouse pain behavior dataset that captures the disease progression of both neuropathic and inflammatory pain across multiple time points. Our method achieves 48.41\% accuracy in a 15-class pain classification task, significantly outperforming human experts (21.33\%) and the widely used method B-SOiD (30.52\%). Furthermore, when the classification is simplified to only three categories, i.e., neuropathic pain, inflammatory pain, and no pain, then our method achieves an accuracy of 73.1\%, which is notably higher than that of human experts (48\%) and B-SOiD (58.43\%). Finally, our method revealed differences in drug efficacy for different types of pain on zero-shot Gabapentin drug testing, and the results were consistent with past drug efficacy literature. This study demonstrates the potential clinical application of our method, which can provide new insights into pain research and related drug development.
Strong Baseline: Multi-UAV Tracking via YOLOv12 with BoT-SORT-ReID
Mar 21, 2025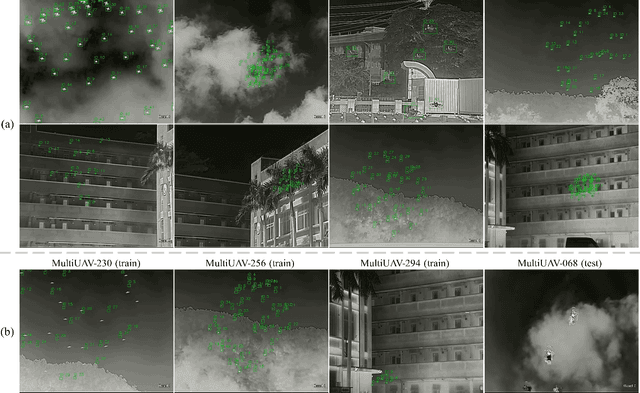
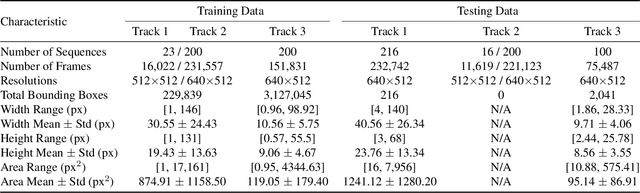
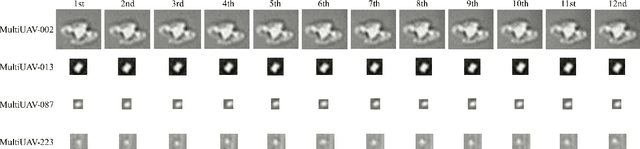

Detecting and tracking multiple unmanned aerial vehicles (UAVs) in thermal infrared video is inherently challenging due to low contrast, environmental noise, and small target sizes. This paper provides a straightforward approach to address multi-UAV tracking in thermal infrared video, leveraging recent advances in detection and tracking. Instead of relying on the YOLOv5 with the DeepSORT pipeline, we present a tracking framework built on YOLOv12 and BoT-SORT, enhanced with tailored training and inference strategies. We evaluate our approach following the metrics from the 4th Anti-UAV Challenge and demonstrate competitive performance. Notably, we achieve strong results without using contrast enhancement or temporal information fusion to enrich UAV features, highlighting our approach as a "Strong Baseline" for the multi-UAV tracking task. We provide implementation details, in-depth experimental analysis, and a discussion of potential improvements. The code is available at https://github.com/wish44165/YOLOv12-BoT-SORT-ReID .
ReynoldsFlow: Exquisite Flow Estimation via Reynolds Transport Theorem
Mar 06, 2025



Optical flow is a fundamental technique for motion estimation, widely applied in video stabilization, interpolation, and object tracking. Recent advancements in artificial intelligence (AI) have enabled deep learning models to leverage optical flow as an important feature for motion analysis. However, traditional optical flow methods rely on restrictive assumptions, such as brightness constancy and slow motion constraints, limiting their effectiveness in complex scenes. Deep learning-based approaches require extensive training on large domain-specific datasets, making them computationally demanding. Furthermore, optical flow is typically visualized in the HSV color space, which introduces nonlinear distortions when converted to RGB and is highly sensitive to noise, degrading motion representation accuracy. These limitations inherently constrain the performance of downstream models, potentially hindering object tracking and motion analysis tasks. To address these challenges, we propose Reynolds flow, a novel training-free flow estimation inspired by the Reynolds transport theorem, offering a principled approach to modeling complex motion dynamics. Beyond the conventional HSV-based visualization, denoted ReynoldsFlow, we introduce an alternative representation, ReynoldsFlow+, designed to improve flow visualization. We evaluate ReynoldsFlow and ReynoldsFlow+ across three video-based benchmarks: tiny object detection on UAVDB, infrared object detection on Anti-UAV, and pose estimation on GolfDB. Experimental results demonstrate that networks trained with ReynoldsFlow+ achieve state-of-the-art (SOTA) performance, exhibiting improved robustness and efficiency across all tasks.
UAVDB: Trajectory-Guided Adaptable Bounding Boxes for UAV Detection
Sep 09, 2024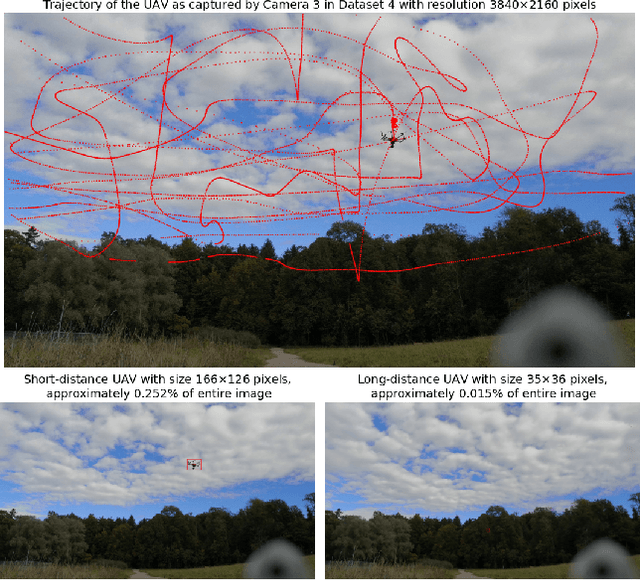
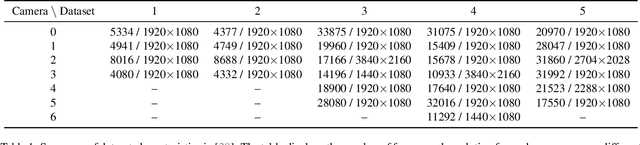
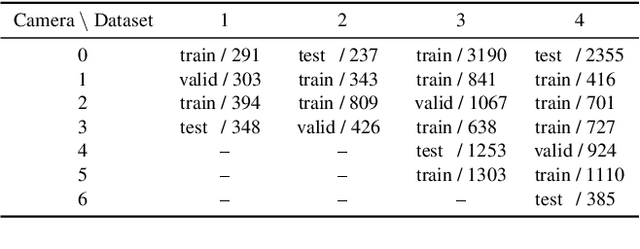
With the rapid development of drone technology, accurate detection of Unmanned Aerial Vehicles (UAVs) has become essential for applications such as surveillance, security, and airspace management. In this paper, we propose a novel trajectory-guided method, the Patch Intensity Convergence (PIC) technique, which generates high-fidelity bounding boxes for UAV detection tasks and no need for the effort required for labeling. The PIC technique forms the foundation for developing UAVDB, a database explicitly created for UAV detection. Unlike existing datasets, which often use low-resolution footage or focus on UAVs in simple backgrounds, UAVDB employs high-resolution video to capture UAVs at various scales, ranging from hundreds of pixels to nearly single-digit sizes. This broad-scale variation enables comprehensive evaluation of detection algorithms across different UAV sizes and distances. Applying the PIC technique, we can also efficiently generate detection datasets from trajectory or positional data, even without size information. We extensively benchmark UAVDB using YOLOv8 series detectors, offering a detailed performance analysis. Our findings highlight UAVDB's potential as a vital database for advancing UAV detection, particularly in high-resolution and long-distance tracking scenarios.
Iterative Refinement Strategy for Automated Data Labeling: Facial Landmark Diagnosis in Medical Imaging
Apr 08, 2024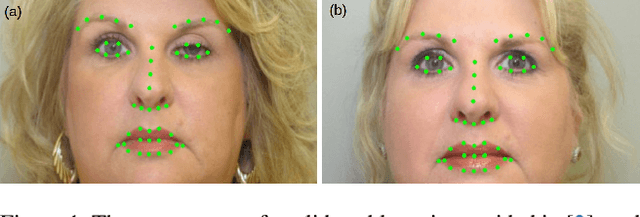
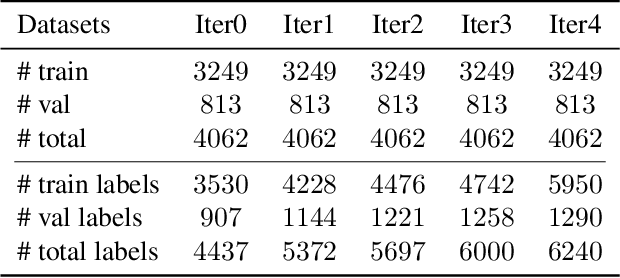
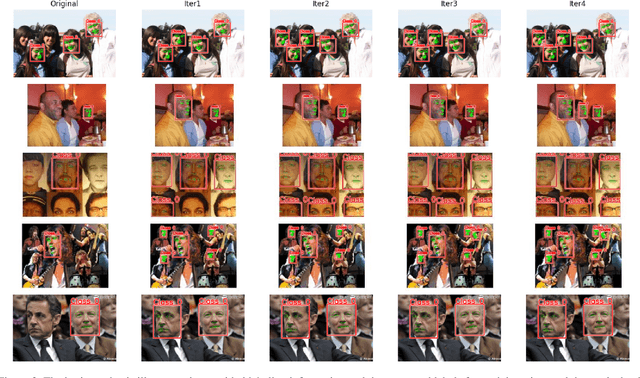
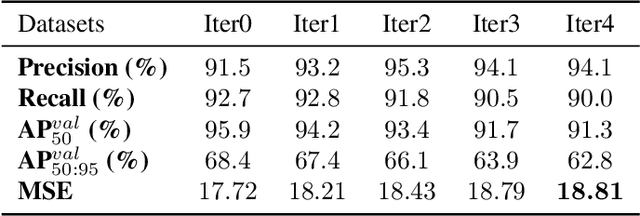
Automated data labeling techniques are crucial for accelerating the development of deep learning models, particularly in complex medical imaging applications. However, ensuring accuracy and efficiency remains challenging. This paper presents iterative refinement strategies for automated data labeling in facial landmark diagnosis to enhance accuracy and efficiency for deep learning models in medical applications, including dermatology, plastic surgery, and ophthalmology. Leveraging feedback mechanisms and advanced algorithms, our approach iteratively refines initial labels, reducing reliance on manual intervention while improving label quality. Through empirical evaluation and case studies, we demonstrate the effectiveness of our proposed strategies in deep learning tasks across medical imaging domains. Our results highlight the importance of iterative refinement in automated data labeling to enhance the capabilities of deep learning systems in medical imaging applications.
Data Stream Sampling with Fuzzy Task Boundaries and Noisy Labels
Apr 07, 2024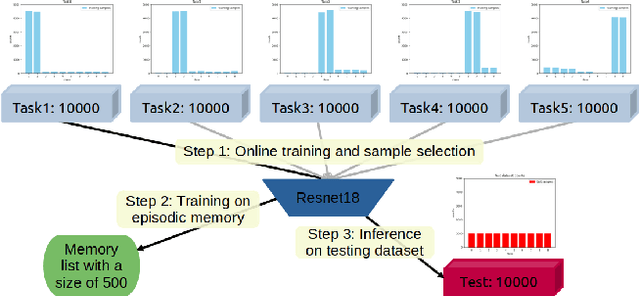
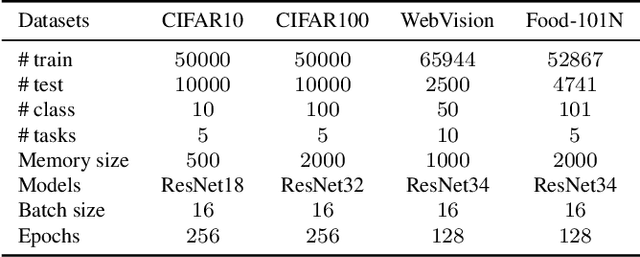

In the realm of continual learning, the presence of noisy labels within data streams represents a notable obstacle to model reliability and fairness. We focus on the data stream scenario outlined in pertinent literature, characterized by fuzzy task boundaries and noisy labels. To address this challenge, we introduce a novel and intuitive sampling method called Noisy Test Debiasing (NTD) to mitigate noisy labels in evolving data streams and establish a fair and robust continual learning algorithm. NTD is straightforward to implement, making it feasible across various scenarios. Our experiments benchmark four datasets, including two synthetic noise datasets (CIFAR10 and CIFAR100) and real-world noise datasets (mini-WebVision and Food-101N). The results validate the efficacy of NTD for online continual learning in scenarios with noisy labels in data streams. Compared to the previous leading approach, NTD achieves a training speedup enhancement over two times while maintaining or surpassing accuracy levels. Moreover, NTD utilizes less than one-fifth of the GPU memory resources compared to previous leading methods.
A New Perspective for Shuttlecock Hitting Event Detection
Jun 17, 2023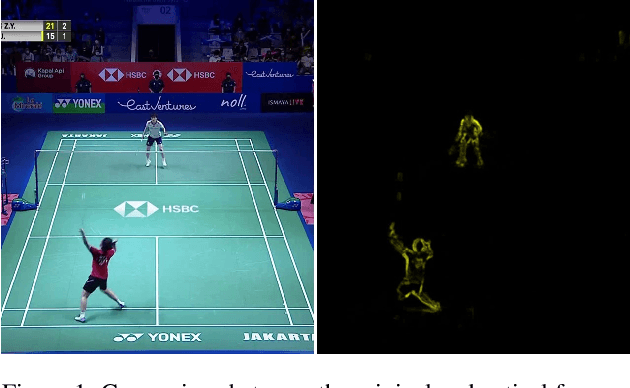
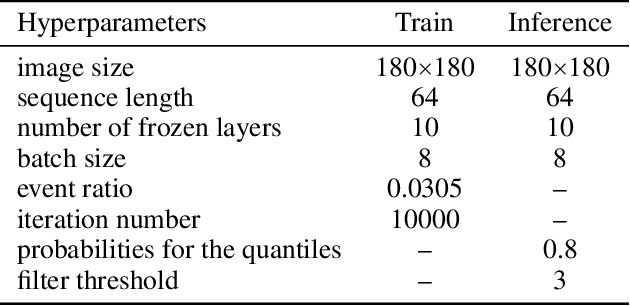
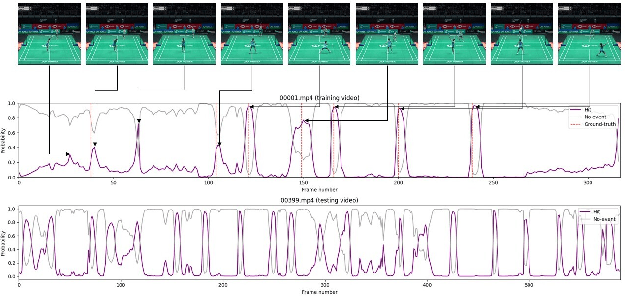
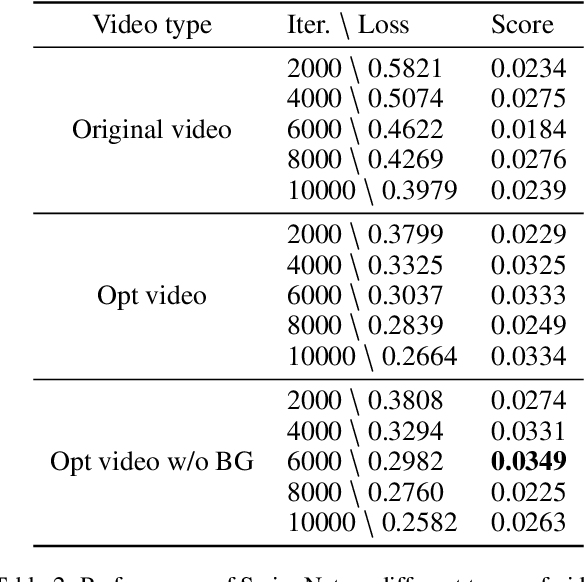
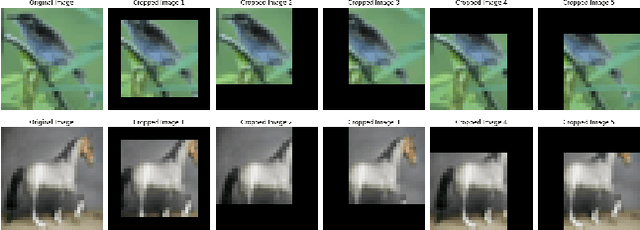
This article introduces a novel approach to shuttlecock hitting event detection. Instead of depending on generic methods, we capture the hitting action of players by reasoning over a sequence of images. To learn the features of hitting events in a video clip, we specifically utilize a deep learning model known as SwingNet. This model is designed to capture the relevant characteristics and patterns associated with the act of hitting in badminton. By training SwingNet on the provided video clips, we aim to enable the model to accurately recognize and identify the instances of hitting events based on their distinctive features. Furthermore, we apply the specific video processing technique to extract the prior features from the video, which significantly reduces the learning difficulty for the model. The proposed method not only provides an intuitive and user-friendly approach but also presents a fresh perspective on the task of detecting badminton hitting events. The source code will be available at https://github.com/TW-yuhsi/A-New-Perspective-for-Shuttlecock-Hitting-Event-Detection.
NeighborTrack: Improving Single Object Tracking by Bipartite Matching with Neighbor Tracklets
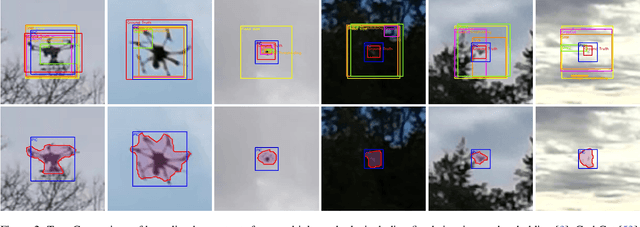
Nov 12, 2022We propose a post-processor, called NeighborTrack, that leverages neighbor information of the tracking target to validate and improve single-object tracking (SOT) results. It requires no additional data or retraining. Instead, it uses the confidence score predicted by the backbone SOT network to automatically derive neighbor information and then uses this information to improve the tracking results. When tracking an occluded target, its appearance features are untrustworthy. However, a general siamese network often cannot tell whether the tracked object is occluded by reading the confidence score alone, because it could be misled by neighbors with high confidence scores. Our proposed NeighborTrack takes advantage of unoccluded neighbors' information to reconfirm the tracking target and reduces false tracking when the target is occluded. It not only reduces the impact caused by occlusion, but also fixes tracking problems caused by object appearance changes. NeighborTrack is agnostic to SOT networks and post-processing methods. For the VOT challenge dataset commonly used in short-term object tracking, we improve three famous SOT networks, Ocean, TransT, and OSTrack, by an average of ${1.92\%}$ EAO and ${2.11\%}$ robustness. For the mid- and long-term tracking experiments based on OSTrack, we achieve state-of-the-art ${72.25\%}$ AUC on LaSOT and ${75.7\%}$ AO on GOT-10K.