 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMobile Manipulation Planning for Tabletop Rearrangement
May 24, 2025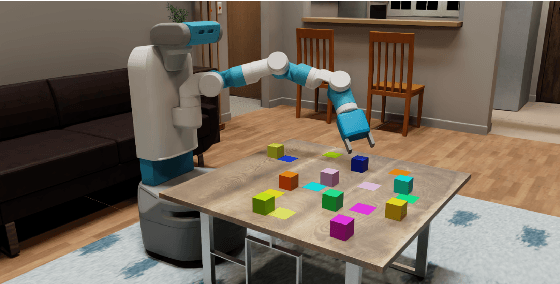
Efficient tabletop rearrangement planning seeks to find high-quality solutions while minimizing total cost. However, the task is challenging due to object dependencies and limited buffer space for temporary placements. The complexity increases for mobile robots, which must navigate around the table with restricted access. A*-based methods yield high-quality solutions, but struggle to scale as the number of objects increases. Monte Carlo Tree Search (MCTS) has been introduced as an anytime algorithm, but its convergence speed to high-quality solutions remains slow. Previous work~\cite{strap2024} accelerated convergence but required the robot to move to the closest position to the object for each pick and place operation, leading to inefficiencies. To address these limitations, we extend the planner by introducing a more efficient strategy for mobile robots. Instead of selecting the nearest available location for each action, our approach allows multiple operations (e.g., pick-and-place) from a single standing position, reducing unnecessary movement. Additionally, we incorporate state re-exploration to further improve plan quality. Experimental results show that our planner outperforms existing planners both in terms of solution quality and planning time.
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
Next Generation Robotics
Jun 29, 2016The National Robotics Initiative (NRI) was launched 2011 and is about to celebrate its 5 year anniversary. In parallel with the NRI, the robotics community, with support from the Computing Community Consortium, engaged in a series of road mapping exercises. The first version of the roadmap appeared in September 2009; a second updated version appeared in 2013. While not directly aligned with the NRI, these road-mapping documents have provided both a useful charting of the robotics research space, as well as a metric by which to measure progress. This report sets forth a perspective of progress in robotics over the past five years, and provides a set of recommendations for the future. The NRI has in its formulation a strong emphasis on co-robot, i.e., robots that work directly with people. An obvious question is if this should continue to be the focus going forward? To try to assess what are the main trends, what has happened the last 5 years and what may be promising directions for the future a small CCC sponsored study was launched to have two workshops, one in Washington DC (March 5th, 2016) and another in San Francisco, CA (March 11th, 2016). In this report we brief summarize some of the main discussions and observations from those workshops. We will present a variety of background information in Section 2, and outline various issues related to progress over the last 5 years in Section 3. In Section 4 we will outline a number of opportunities for moving forward. Finally, we will summarize the main points in Section 5.